Descargar para leer sin conexión
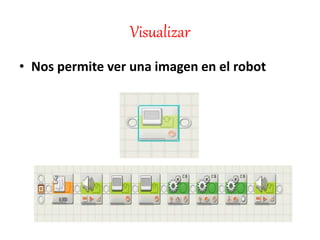

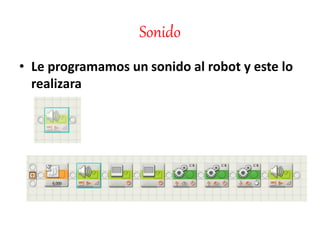

Este documento describe cuatro comandos para programar un robot: visualizar muestra una imagen, tiempo de espera programa un límite de tiempo para el recorrido, sonido agrega un sonido al robot, y rotación permite que el robot se mueva de un lugar a otro.
























































