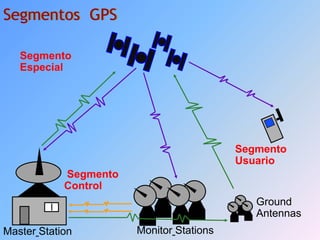
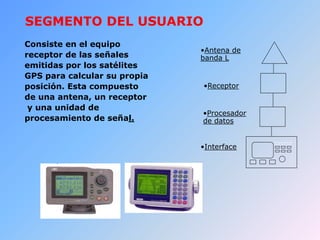
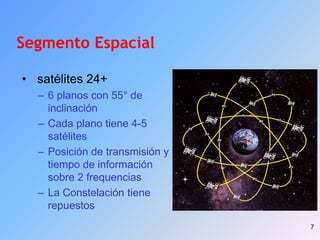
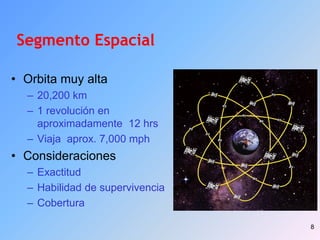
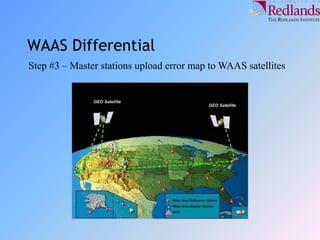
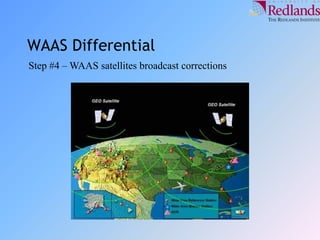
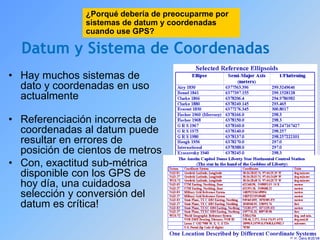
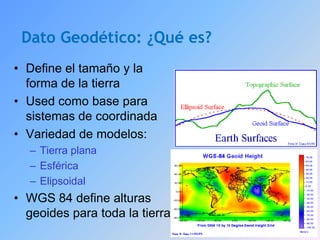
El documento presenta una visión general del sistema GPS, el cual ofrece posicionamiento, navegación y cronometría a través de una constelación de satélites y estaciones terrestres. Se explican los segmentos del sistema GPS, su funcionamiento mediante triangulación y las aplicaciones tanto militares como civiles. Además, se abordan aspectos como la exactitud, errores comunes y el uso de tecnologías de corrección para mejorar la precisión de las mediciones.