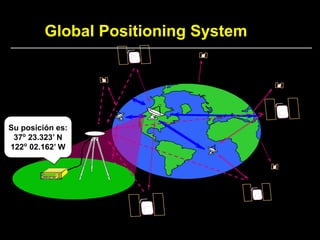
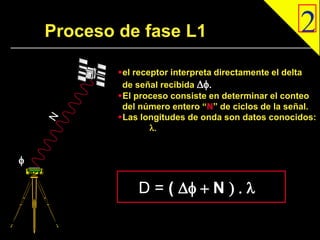
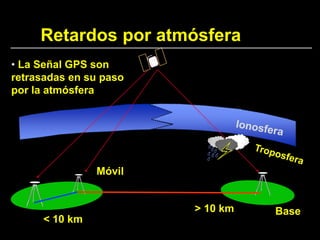
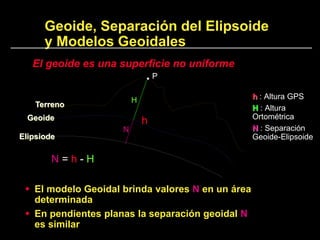
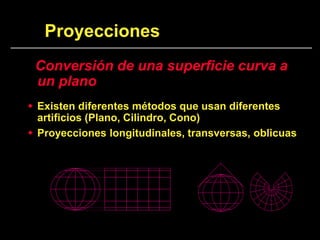
El documento proporciona información sobre el Sistema de Posicionamiento Global (GPS). Explica que GPS está compuesto de tres segmentos: control, espacial y usuarios. Los satélites envían señales que los receptores usan para calcular la distancia a través de la trilateración y determinar la posición del usuario. El posicionamiento diferencial puede mejorar la precisión reduciendo errores. Finalmente, discute los sistemas de referencia y coordenadas utilizados en GPS.