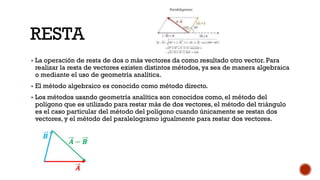
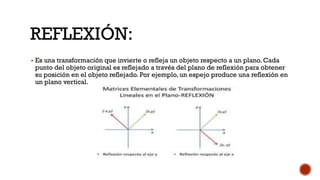
El documento aborda la teoría y operaciones con vectores en dos y tres dimensiones, incluyendo la suma, resta, multiplicación por un escalar, producto punto y producto cruz. Además, se mencionan las transformaciones lineales como rotación, reflexión, traslación, expansión y contracción, así como su aplicación en espacios vectoriales mediante matrices. Finalmente, se destacan herramientas como Geogebra y Matplotlib para la visualización y manipulación de conceptos matemáticos.