Este documento presenta un proyecto para construir un vehículo no tripulado que detecte obstáculos utilizando un sensor ultrasónico y un microcontrolador Arduino. El proyecto explica conceptos básicos de programación como programación en Arduino y Visual Studio. También describe componentes clave como el sensor ultrasónico HC-SR04, módulo Bluetooth, chip L293D, Arduino AT-Mega 2560 R3, sensor de humedad DHT11 y transmisión en vivo con GoPro. El objetivo es poner en práctica conocimientos de programación












































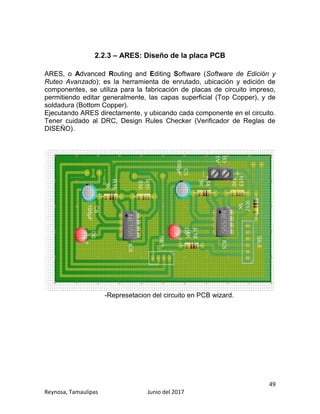







































![[Arqui1]practica2 200815555](https://cdn.slidesharecdn.com/ss_thumbnails/arqui1practica2200815555-140918220820-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)





















