Descargar para leer sin conexión







![12
para trabajar e implementar, Internet de las cosas e
Inteligencia Artificial nos da la oportunidad de colocar más
sensores en las profundidades del mar sin el elevado costo que
hoy en día implica, la fabricación masiva de chips y sensores
disminuirán los costos. Podremos cubrir más áreas del océano
y monitorear en tiempo real los datos suministrados a las redes
de Internet, con un mayor volumen de datos los estudios serán
más precisos y podrán ser analizados en poco tiempo por la
Inteligencia Artificial, pues está es capaz de procesar grandes
cantidades de información y encontrar patrones o
comportamientos y relacionarlos con otras lecturas, inclusive
permitiría hacer relación individual de contaminación de cada
persona y rastrear las fuentes para su control, detectar los
niveles de contaminación de ríos o lagos permitiendo tomar
acciones antes de que afecten otros cuerpos de agua y sea
demasiado tarde.
Sabemos cómo llegar a ser exitosos, la meta está a la vista
y solo hace falta voluntad para recibir la nueva era, pero aquí
está la diferencia, pues el cambio tiene que lograrse si todos
cooperamos.
CONCLUSIONES
Los robots submarinos son fundamentales para el progreso
de las actividades que se desarrollan en el océano, permiten
seguir aportando conocimiento de lugares donde el ser
humano no tiene alcance.
Componentes de la Cuarta Revolución industrial como el
Internet de las cosas y la Inteligencia Artificial en
combinación con la robótica producen infinidad de
aplicaciones para nuevas oportunidades de desarrollo.
Los robots van a seguir permitiendo explorar el océano. Se
demuestra la importancia de obtener más información en
tiempo real y continuo de los océanos del planeta para
entender sus comportamientos.
La Electromecánica tiene el futuro garantizado. La
robótica continuará superando las limitaciones humanas,
adquiriendo más importancia y participación.
Está al alcance tomar acciones que nos conduzcan a un
desarrollo sostenible utilizando las herramientas para
administrar los recursos y encontrar soluciones a los
problemas globales. Así podremos dar paso a la 5ta
Revolución Industrial.
RECOMENDACIONES
Elaborar estudios sobre cómo disminuir los costos que las
operaciones oceánicas requieren, es prioridad para que los
países poco desarrollados también dispongan de estas
tecnologías.
Desarrollar e implementar proyectos que utilicen energías
limpias renovables, esto contribuirá a la autonomía de las
tecnologías que se usarán en la 5ta.
Mejorar la preparación de los electromecánicos en temas
referentes a los componentes de la Cuarta Revolución
Industrial.
AGRADECIMIENTOS
A mis padres, Luis y Ester. Por su apoyo en todo momento.
A mis hermanas Karina y Yesenia, su guía y apoyo me
motivan para superar los obstáculos de la vida.
REFERENCIAS
[1] ACNUR Comité Español. (s.f.). Los 5 principales
problemas del mundo actual. Obtenido de
https://eacnur.org/blog/principales-problemas-
delmundo-actual/
[2] Barja, L. (2017). Sobre Historia. Obtenido de
https://sobrehistoria.com/todo-sobre-la-
revolucionindustrial/
[3] Capocci, R. (2017). Inspection-Class Remotely Operated
Vehicule, a Review. Marine Science and Engineering.
[4] Carreras, M. (2012). Inspección visual subacuática
mediante robótica submarina. Revista Iberoamericana de
Automática e Informática industrial.
[5] Comité Español de Automática. (2008). Libro Blanco de
la Robótica. España: CEA.
[6] Drake, N. (2014). National Geographic. Obtenido de
https://www.nationalgeographic.com/magazine/2018
/03/astronauts-space-earth-perspective/
[7] E/V Nautilus. (2018). Entrevista Ingeniera Biológica,
Piloto de ROV Argus. Estados Unidos, Canadá.
[8] E/V Nautilus. (2018). Entrevista Ingeniera de Video,
Bióloga Marina. Estados Unidos, Canadá.
[9] Enzmann, R. (2014-2018). ROV Planet. ROV
Planet.
[10]GREENPEACE. (2016). Plásticos en los océanos.
Obtenido de https://archivo-
es.greenpeace.org/espana/Global/espana/2016/report
/plasticos/plasticos_en_los_oceanos_LR.pdf
[11]Las Naciones Unidas, ONU. (2018). Naciones
Unidas. Obtenido de
http://www.un.org/es/sections/issues-depth/globalissues-
overview/index.html
[12]Marine Technology Society. (s.f.). Marine
Technology Society. Obtenido de
http://www.rov.org/rov_history.cfm
[13]Moreno, H. A. (2014). Robótica Submarina: Conceptos,
Elementos, Modelado y Control. Revista Iberoamericana
de Automática e Informática industrial.
[14]Naciones Unidas. (2015). Objetivos de Desarrollo
Sostenible. Obtenido de
https://www.un.org/sustainabledevelopment/es/objet
ivos-de-desarrollo-sostenible/
[15]Naciones Unidas. (2017). Conferencia sobre los océanos.
Obtenido de http://www.un.org/es/conf/ocean/
[16]National Academy of Sciences. (2015). Sea Change.
United States: National Academy of Sciences.](https://image.slidesharecdn.com/revistapaper1-180916143704/85/Revista-paper-1-13-320.jpg)
![13
[17]NOAA. (2018). National Oceanic and Atmospheric
Administration. Obtenido de http://www.noaa.gov/ [18]
Ocean Exploration Trust. (2018). Nautilus Live. Obtenido
de https://www.nautiluslive.org/
[19]Organización de las Naciones Unidas para la
Alimentación y la Agricultura. (2018). FAO, Home.
Obtenido de http://www.fao.org/home/es/
[20]Organización de las Naciones Unidas para la
Alimentación y la Agricultura. (2018). FAO, statistics.
Obtenido de
http://www.fao.org/statistics/es/
[21]Organización de las Naciones Unidas para la Educación,
Ciencia y Cultura. (2018). UNESCO. Obtenido de
https://es.unesco.org/
[22]Programa Mundial de Investigaciones Climáticas .
(2018). WCRP. Obtenido de https://www.wcrp-
climate.org/
[23]Ramírez Llodra, E. (2003). BIOGEOGRAFIA DE
ECOSISTEMAS QUIMIOSINTETICOS
PROFUNDOS (ChEss): EXPLORANDO EL
HEMISFERIO SUR. Revista Internacional de
Biodiversidad, Oceanología y Conservación.
Obtenido de
https://scielo.conicyt.cl/scielo.php?script=sci_arttext
&pid=S0717-65382003000200006&lang=es
[24]RovMarine Technologies. (2018). RovMarine
Technologies. Retrieved from
http://www.rovmarine.it/en/home-eng/14-
notcategorized/16-the-history-of-rovs
[25]SEAS ESTUDIOS SUPERIORES ABIERTOS. (2018).
Industria 4.0 la Cuarta Revolución
Industrial. Obtenido de
https://www.seas.es/blog/automatizacion/la-
cuartarevolucion-industrial/
[26]Tech Target. (2017). SearchDataCenter
AI.
Obtenido de
https://searchdatacenter.techtarget.com/es/definicion
/Inteligencia-artificial-o-AI
[27]Tech Target. (2017). SearchDataCenter ARPA.
Obtenido de
https://searchnetworking.techtarget.com/definition/A
RPANET
[28]Tech Target. (2017). SearchDataCenter
IoT.
Obtenido de
https://searchdatacenter.techtarget.com/es/definicion
/Internet-de-las-cosas-IoT
[29]UNEP. (2016). Marine plastic debris and microplastics.
Obtenido de
https://www.unenvironment.org/es/node/1527
[30]United Nations. (2015). Division for Sustainable
Development Goals. Obtenido de
https://sustainabledevelopment.un.org/sdgs
[31]University of Victoria, Canada. (2018). Ocean
Networks Canada. Retrieved from
http://www.oceannetworks.ca/
[32]USNUM. (2016). United States Naval UnderSea
Museum. Retrieved from
http://www.navalunderseamuseum.org/whitehead/](https://image.slidesharecdn.com/revistapaper1-180916143704/85/Revista-paper-1-14-320.jpg)











![38
Entre los principales problemas de secado al
natural que afectan a los productores cafetaleros
se encuentran las condiciones climatológicas ya
que la temporada donde el fruto de café tiene
mayor cosecha es en la época de invierno en donde
el secado en patios se ve afectado por las lluvias y
las bajas temperaturas provocando que el tiempo
de secado sea mayor durando aproximadamente de
5 a 15 días.
Se identificó las diferentes técnicas de secado
que hay en el mercado nacional siendo el secado al
sol una de las más utilizadas por los cafetaleros aun
así el secado mecánico se utiliza en industrias
cafeteras donde tienen mayor demanda de café lo
que genera mayor cantidad de secado.
Según investigaciones realizadas y lo
evaluado desde el momento que el café es lavado,
este alcanza una humedad aproximada de 60%
por lo que secarlo al sol y llegar a obtener un 12%
de humedad demanda mucho tiempo ya que
como se ha mencionado anteriormente tiene una
dependencia de las condiciones climatológicas,
por lo que secarlo mecánicamente es la mejor
opción para tener mayor producción.
En la zona cafetalera es variado los tipos de
sistemas mecánicos para realizar el proceso de
secado de café donde se diferencian de tamaño
(de una o dos cámaras) de forma (rectangular o
tipo silo), fuente de poder (electricidad, carbón,
madera o algún tipo de combustible) y en la
cantidad de café que pueden secar.
Recomendaciones
Es importante también evaluar factor de
presión estática y flujo de aire ya que interfieren en
el proceso de secado.
En los avances de desarrollo tecnológicos se
ha venido implementando también el secado de
café con microondas por lo que puede ser un gran
método de secado e investigación.
El sistema automatizado se puede optimizar
más, colocando otros sensores teniendo un mayor
control de la máquina y los procesos.
Se puede implementar también una banda
trasportadora para el ingreso de café hacia la
tolva y un mejor sistema para la extracción del
café cuando esté listo.
Se pueden implementar más opciones en el
sistema SCADA para satisfacer las diferentes
necesidades de la industria cafetalera por ejemplo
ver graficas de temperatura y humedad.
AGRADECIMIENTOS
Quiero agradecer a todas aquellas personas
que de una u otra manera me han ayudado y han
apoyado a lo largo de estos años en esta que es
para mí una pasión “La electrónica”.
En primer lugar quiero agradecer el apoyo
recibido por parte de mi familia, desde mis padres
que han sido mi sostén desde pequeño
inculcándome el sacrificio, esmero, dedicación y
perseverancia por mis sueños donde siempre me
han sabido inyectar moral en mis peores
momentos, no solo vividos a causa de mis estudios
sino también a consecuencia de la vida, en especial
a mi madre Ana Jiménez que sacrifico tanto para
darme la oportunidad de ejercer mis estudios y
espero se sienta orgullosa en este día tan
importante para mí, a mis hermanas que me han
dado los palabras justas para siempre seguir hacia
adelante y no bajar la cabeza. Para mi novia Grettel
que también ha sido un gran apoyo para mi vida,
donde me ha motivado, aconsejado e impulsado
para obtener este título de ingeniería donde ella
conjunto con los gemelos y mi Mari son mi motor,
fuerza e impulso de seguir día con día.
REFERENCIAS
[1] (BENDIG MAQUINARIA S.A, 2018)
[2] (ICAFE, 2018)
[3] (Ingeniería mecafenix ©, 2018)
[4] (Centro de Tecnología e Innovación (CTIN), 2013)
[5] (Echavarria, 1999)
[6] (Sampieri, 2014)
[7] (techlandia, 2001)
[8] (Wonderware Spain, 2018)
[9] (QuimiNet, 2000)
[10] (© PT Limited, 2018)
[11] (TTV S.A., 2018)
[12] (SyP Sistemas de ventilacion, 2018)
[13] (Sistemas de regulacion y control, 2016)
[14] (Filiu, 2017)
[15] (Electricfor ©, 2018)](https://image.slidesharecdn.com/revistapaper1-180916143704/85/Revista-paper-1-39-320.jpg)



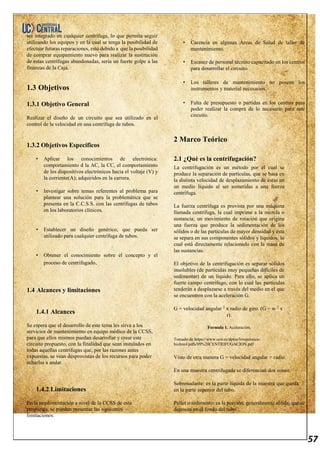
![48
Potencia Máxima = 0,18*H*D*v3 [W]
Donde: H = altura
D = Diámetro total del rotor
V = Velocidad del viento
Tabla 2. Potencia máxima.
Y para poder determinar las rpm:
RPM Savonius = (60·λ·v)/(π·D) [rpm]
Donde:
λ = La velocidad específica (aprox. 1)
v = velocidad del viento
D = diámetro del rotor
Tabla 3. Revoluciones en turbina.
2.2 Sistema de generación, almacenamiento y
conversión de la energía.
El sistema ocupa un subsistema que es
contemplado por el generador eléctrico, batería de
almacenamiento y un inversor de voltaje para las
salidas de tensión en 12 o 120V, a continuación una
breve descripción de estos elementos.
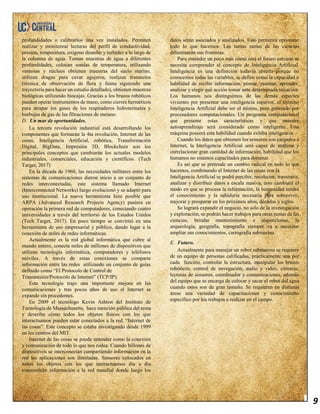
2.2.1 Generador de imanes permanentes.
Es una máquina del tipo motor sincrónico, en el que
se han cambiado los bobinados del estator
(típicamente) por imanes permanentes. Esto con el
fin de cuando sean cortados los campos
electromagnéticos de los imanes permanentes por
el bobinado del rotor; se induzca en este una
corriente electromotriz, al ser encausada ya sea por
anillos rasantes o las delgas de un conmutador se
pueda inducir una corriente eléctrica.
Fig. 6. Partes de generador eléctrico de imanes permanentes.
Por el eje de giro a los generadores se les denomina
de flujo axial o radial, esto claramente no es
correcto físicamente, ya que el flujo magnético por
la ley de la mano derecha siempre será
perpendicular al campo magnético de los imanes;
sino se refiere a donde se colocan los imanes ya
sean en el rotor o estator.
Fig. 7. Colocación de imanes en un generador
Como se puede ver en la figura 7 los imanes en
ambos casos se colocan con polos magnéticos
alternados y en números pares, esto para que
cuando una espira este cortando el campo de un
par de imanes con polos opuestos a una velocidad
angular determinada y con esta podemos
determinar la fem inducida en cada bobina,
mediante la función:
Fem inducida en bobina = 0,148(rpm)*r*B*N*L
Donde: B = campo magnético de bobina
r = radio del imán
N = número de espira en bobina
L = longitud de la bobina
Tabla 4. Fem inducida en bobina.
2.2.2 Batería de celdas.
Las baterías de celdas funcionan bajo el principio
fuentes de voltaje en serie, ya que están
compuestas de 6 celdas con la capacidad de
producir 2V cada una y esto se suma a la
siguiente hasta llegar a los 12V de los que
hacemos uso normalmente. Cada celda contiene
dos grupos de láminas (varían su composición de
una marca y modelo a otro) que forman dos
electrodos con cargas opuestas. Las celdas están
cubiertas por un 65% de agua y un 35% de ácido
sulfúrico los cuales actúan como electrolitos, que
al trasmitir electrones al plomo y oxido de plomo
de las rejillas estas generan una corriente desde
la primer celda a la segunda y así sucesivamente.
Una vez se descarga la batería puede volverse a
cargar mediante mecanismos como alternadores
o generadores; es importante hacer notar que
para dar paso a cada una de estas etapas es](https://image.slidesharecdn.com/revistapaper1-180916143704/85/Revista-paper-1-49-320.jpg)
![50
Tabla 6. Extracto de tabla 220.12
Para el cálculo de caída de tensión en el código
se estable un procedimiento general el cual aplica
tanto en el ramal de tomacorrientes de uso
general, ramal de iluminación e incluso para la
acometida entre el generador y la batería.
Caída Voltaje monofásica = (2*ϕ*L*I)/S [V]
Donde: L = longitud del cable
I = Corriente activa
ϕ = resistividad, 0,017 cobre y 0,027 aluminio
S = sección transversal del conductor
Tabla 7. Cálculo de caída de voltaje.
También podemos calcular este valor en su valor
porcentual.
% Caída Voltaje = CV* 10/12
Donde: CV= Caída de voltaje
Tabla 8. %Cálculo de caída de voltaje.
Para poder realizar estos cálculos se deben
utilizar los datos de la tabla 8 del capítulo 9 para
extraer los datos de propiedades de los
conductores.
Tabla 9A. Tabla 8 Propiedades de los
conductores
Con los datos presentados en esta sección
podemos realizar los cálculos necesarios para el
diseño de nuestro proyecto.
CAPÍTULO 3. Memoria de Cálculo.
3.1 Cálculo de potencia entregada por la turbina
Savonius.
3.1.1 RPM Savonius.
El primer dato a encontrar es las revoluciones
por minuto que puede alcanzar típicamente la
turbina. Para esto es importante hacer notar que
se obtuvo la información de velocidad media del
viento en la estación de Bagaces la página
pública del IMN, en promedio la velocidad es
de 40 km/h (11.1 m/s), pero el movimiento
observado en el sitio utilizando un velocímetro
de bicicleta colocado en el Savonius fue de 33
km/h (9.17 m/s); por lo que utilizará la
observada al ser el peor escenario.
RPM Savonius = (60·λ·v)/(π·D) [rpm]
RPM Savonius = (60·1·9.17)/(π·1) [rpm]
RPM Savonius = 175 [rpm]
Donde: λ = La velocidad específica [1]
v = velocidad del viento [9.17 m/s]
D = diámetro del rotor [1 m]
3.1.2 Potencia del Savonius.
Para las palas de la turbina se utilizó un barril de
aceite de 200 litros.
Potencia Máxima = 0,18*H*D*v3 [W]
Potencia Máxima = 0,18*1*0.8*(9.17)^3 [W]
Potencia Máxima = 111 [W] aproximadamente 1/7 Hp
Tabla 9B. Extracto Tabla 8.](https://image.slidesharecdn.com/revistapaper1-180916143704/85/Revista-paper-1-51-320.jpg)
![51
Donde: H = altura [1 m]
D = diámetro del rotor [0.8 m]
V = velocidad del viento [9.17 m/s]
3.2 Cálculo de potencia entregada por generador.
3.2.1 Fem inducida por el generador.
Al no tenerse los datos suficientes para hacer el
cálculo matemático (no se tiene ni la potencia del
campo magnético de los imanes ni de las bobinas)
ya que el generador fue reutilizado de un
motocultor dañado.
Teniendo en cuenta que nuestra turbina puede
llegar a 175 rpm y el juego de poleas es de 6:1 por
lo que el máximo de revoluciones en el generador
será de 1050 rpm.
Por lo que se procedió a hacer el análisis mediante
la inspección visual, poniéndolo en un torno y
midiendo en la salida del generador utilizando una
resistencia Shottky y se obtuvieron los siguientes
datos.
RPM
Corriente
generada
100 0,1 A
300 0,4 A
700 1,2 A
1000 1,5 A
1200 1,83 A
1500 2,15 A
3.3 Cálculo para el diseño eléctrico
3.3.1 Numero de ramales mínimo.
Con este dato podemos saber cuántos circuitos de
iluminación y tomas de uso general necesitamos.
# de circuitos ramales = A / Voltio- Amper por m2
# de circuitos ramales = 36 /33
# de circuitos ramales = 1
Donde:
A = área de la casa [36 m2] VA/m2= dato
de tabla 220.12 [33]
3.3.2 Caída de voltaje.
Ya que los factores para determinar las caídas de
tensión se encuentran en la misma tabla 8 del
capítulo 9 de C.E. Nacional podemos aplicar la
misma fórmula para ambos ya que en realidad la
formula no contempla variables entre corriente
directa o alterna.
Caída en corriente alterna.
El circuito de tomas de uso general va a tener un
máximo de 1200W ya que el inversor es de
1500W y se utilizará a un 80% de su capacidad
total. Esto nos da una corriente de 10A.
Caída Voltaje monofásica = (2*ϕ*L*I)/S [V]
Caída Voltaje monofásica = (2*0,017*6*10)/3,31
Caída Voltaje monofásica = 0,61 V
Donde: L = longitud del cable [6 m]
I = Corriente activa [10 A] ϕ = resistividad,
0,017 cobre seccióntransversaldelconductor
[3.31
S = mm]
Y el porcentaje de la misma es:
% Caída Voltaje = CV* 10/12
% Caída Voltaje = 0,61* 10/12
% Caída Voltaje = 0,51%
Donde: CV= 0,61 V
Caída en corriente directa.
Ya que según el diseño que podemos diseñar se
van a utilizar un total de cuatro luminarias de
15W y 12V por lo que la corriente consumida
total será de 6A.
Caída Voltaje monofásica = (2*ϕ*L*I)/S [V]
Caída Voltaje monofásica = (2*0,017*5*6)/3,31
Caída Voltaje monofásica = 0,3 V
Donde: L = longitud del cable [5 m]
I = corriente activa [6 A]
ϕ = resistividad, 0,017 cobre
S = sección transversal del conductor [3.31 mm]
Y el porcentaje de la misma es:
% Caída Voltaje = CV* 10/12](https://image.slidesharecdn.com/revistapaper1-180916143704/85/Revista-paper-1-52-320.jpg)
![52
% Caída Voltaje = 0,3* 10/12
% Caída Voltaje = 0,25%
Donde:
CV= 0,3 V
Por ultimo podemos calcular la caída en la
cometida, sabiendo que la máxima corriente del
generador será de 1.5A por las limitaciones dados
por la construcción misma de nuestra turbina.
Caída Voltaje monofásica = (2*ϕ*L*I)/S [V]
Caída Voltaje monofásica = (2*0,017*14*1,5)/3,31
Caída Voltaje monofásica = 0,21 V
Donde: L = longitud del cable [14 m]
I = corriente activa [1,5 A] ϕ = resistividad,
0,017 cobre sección transversal del
conductor [3.31
S = mm]
Y el porcentaje de la misma es:
% Caída Voltaje = CV* 10/12
% Caída Voltaje = 0,21* 10/12
% Caída Voltaje = 0,18%
Donde: CV= 0,21 V
CAPÍTULO 4. Propuesta de diseño.
Se tuvo como premisa hacer uso de la mayor
cantidad de materiales de reciclaje y chatarra para
aminorar el impacto de la huella de carbono y la vez
disminuir costo. La mayoría de la mecanización se
realizó personalmente o con la cooperación de
amigos y familiares en la zona más cercana posible
al lugar del ensamble.
4.1 Diseño de turbina.
Para el diseño de la turbina se escogió el la turbina
tipo Savonius por las ventajas expuestas en la
sección 2.1.2B y las piezas.
La turbina es básicamente tres medios barriles
unidos por dos abrazaderas de platina tipo punta de
diamante mediante tornillos a las palas, estas giran
en un eje de tuvo galvanizado de 3/4". A la vez están
unidas entre sí por un marco de angular de hierro de
1” de ancho para darle rigidez al momento de girar.
Él tuvo endosa en un eje de lo que fuera trozo de
barra, que fue torneado para este fin, además es
ajustado
mediante
dos tornillos
prisioneros para evitar la
vibración.
El eje gira sobre un par de
muñoneras colocadas en
una caja de angular donde
también se alinearon un
juego de poleas de 12” en
el eje de la turbina y otra
de 2” en el generador. Es
importante que en las poleas se hicieron “nidos”
en el eje para poder asegurarlos.
Para poder alinear el centro de masa de la turbina
con él tuvo que nos sirve de torre, se utilizó una
placa de hierro de 1/8" y se atornillo para que se
posible desmontar la turbina por efecto de
mantenimiento como sería un cambio de fajas o
daños en el mismo generador.
También se utilizó la base para colocar un
velocímetro con el que se midió la velocidad de
giro de la turbina.
En lo respectivo a la construcción tanto de la base
como del mismo Savonius
los mayores retos fueron en
el alineamiento de las piezas
ya que evitar la vibración en
un proceso mecánico
sometido a la intemperie
toma mayor complejidad, ya
que, hay que tener en cuenta
que a corto plazo las piezas
se fatigarán así que el
alineamiento de las
estructuras es aún más
importa. Fig. 11. Base en
angular.
Fig. 10.Turbina Savonius.](https://image.slidesharecdn.com/revistapaper1-180916143704/85/Revista-paper-1-53-320.jpg)
![54
Esto se logró cumpliendo con
• Se realizó el levantamiento de las
necesidades de consumo eléctrico básicas
de hogares en esta condición, se pudo
realizar un marco de referencia para el
diseño eléctrico del mismo.
• Se llevó a cabo el levantamiento del
croquis eléctrico a las instalaciones
actuales. Determinando requisitos como
caídas de voltaje, y calidad de los
materiales a utilizar.
• Se ejecutó el estudio y diseño de un
sistema de generación eólica que cumplió
con las necesidades de los puntos 1 y 2.
• Se construyó en el campo un modelo de
generación que pudo acercarse a las
necesidades teóricas, buscando la
satisfacción del estudio delos puntos 1 y 3.
5.2 Recomendaciones
• Es de vital importancia tener todos los
materiales inventariados ya que al trabajar
en un lugar tan distante, se vuelve
especialmente complejo el poder ir a
comprar o conseguir desde un tornillo
hasta una herramienta; por lo que se
recomienda hacer un listado de
necesidades cada vez que se llegue al
campo.
• El definir cuál o cuáles elementos serán
limitantes para el proyecto (en nuestro
caso el generador) es la primera prioridad
y se deben de enfocar todos los esfuerzos a
resolverlo ya que esto evitará rediseños y
ajustes en el camino.
• La recomendación más importante es
disfrutar el proceso ya que la frustración es
inherente en a este tipo de proyectos al no
existir planos o estudios que nos sirvan de
guía, por lo que siempre vale la pena
recordar las sabias palabras: “Siempre se
resuelve de lo sencillo a lo complejo”.
• Se recomienda implementar este tipo de
sistema en zonas donde no se cuente con
cobertura eléctrica.
• Se recomienda tomar en cuenta la
posibilidad de comercializar esta solución,
ya que aunque acá en el país la zona sin
cobertura eléctrica es muy escaza a nivel
centro americano es muy amplia, por lo
que en realidad se encuentra hay una
amplia oportunidad de negocio.
5.3 Agradecimientos
A Dios por ser el primer y gran inventor, por su
amor infinito. A los amigos de desvelos y
profesores que formaron y deformaron
pensamientos en nuestro centro de estudio. Al
Ing. Mario Picado por no solo ser un ejemplo
como profesional y personal sino por enseñarme
a pensar por que funcionan las cosas y que
procesos hay detrás. A mi esposa Rebeca y mi
hijo Lucas quienes siempre me retan a seguir
pensando en inventos nuevos, por su amor y
compañía… Eternamente GRACIAS..!
Referencias.
[1] Universidad de Castilla La
Mancha
(España). (s.f.). Curso de fisica ambiental.
Energia eólica. Obtenido de
https://previa.uclm.es/profesorado/ajbar
ber
o/FAA/EEOLICA_Febrero2012_G9.pd
f.
[2] Grupo SSC SA San Miguel de Allende
Mexico. (s.f.). Trabajo en extenso
aerogenerador Savonius Obtenido de
http://www.academia.edu/4472261/Tra
baj
o_en_extenso_Aerogenerador_Savoniu
s.
[3] Universidad de Valencia (España).
(s.f.). Funcionamiento de un generador
de imanes permanentes aplicando la
expresión de
Lorentz. Obtenido de
https://www.uv.es/~navasqui/aero/Fung
en per.pdf.
[4] Industrias Bosch. (s.f.).Manual de
Baterias.
Obtenido de
http://www.serverwin.autonauticasur.c
om/
Uploads/Bosch-
NTDC002%20Baterias%20Jun14.pdf.
[5] NFPA70 Código Eléctrico Nacional.
Obtenido de los Capitulos 2 articulo 210
Circuitos Ramales. y Capitulo 9.
Tablas; tablas 220.12, y tabla 8
Resistencia y reactancia de c.a. de
cables trifásicos para
600 V a 60 Hz y 75° C (167° F) Vista panorámica desde el frente de la cas](https://image.slidesharecdn.com/revistapaper1-180916143704/85/Revista-paper-1-55-320.jpg)




![63
A causa de esta conexión directa, el motor
empezará a girar en la dirección inversa de frenado.
5 Conclusiones y
Recomendaciones
5.1 Conclusiones
1) Los diseños para centrifugas son variados, lo
más común que se utiliza en la actualidad son
los controladores por PIC, sin embargo, en la
C.C.S.S. no cuentan con los equipos de
programación para PICS, lo cual no es una
alternativa viable a utilizar.
2) Los talleres de la C.C.S.S. tienen muchas
limitantes con respecto a poder invertir en
investigación o pruebas.
3) Debemos tomar en cuenta; que en nuestro
mercado de componentes electrónicos se ha
limitado mucho el hecho de conseguir
variedad en componentes, lo cual nos limita a
encontrar diversidad en opciones.
4) Dado lo anterior; este diseño se centró en algo
simple; que sea factible de construir e
implementar en la C.C.S.S. con componentes
fáciles de conseguir y así tener una opción
viable para realizar modificaciones;
justificadas como reparaciones en las
centrífugas de la institución.
5) A nivel de programas para la creación de
circuitos electrónicos, me fue bastante difícil
el poder acceder a un programa que contenga
todos los elementos para desarrollar circuitos.
Por lo tanto, se utilizaron métodos más
rudimentarios.
6) Al término de este proyecto, se cumplen los
objetivos planteados ya que este circuito se
puede implementar en centrifugas de varias
marcas, utilizando todos los demás elementos
que posean los equipos.
5.2 Recomendación
El problema planteado en este estudio se refiere a
las centrífugas de laboratorio clínico, sin embargo,
la C.C.S.S. posee una gran gama de equipos
médicos diversos, los cuales es muy probable que
padezcan problemas muy similares al planteado.
Por lo tanto, es conveniente que la Institución cree
un departamento de investigación e innovación;
donde se les dote de todos los recursos necesarios
(software, equipos de programación para PICS,
confección de impresos) para que puedan realizar
arduas investigaciones y de estas surjan soluciones
apropiadas y viables para remediar problemas en
los equipos médicos que conllevan el dar de baja
equipos que pueden ser rescatables.
Referencias
[1] Astromia. (s.f.). Centrífuga (fuerza) -
Diccionario de astronomía - Astronomía
Educativa. Obtenido de
https://www.astromia.com/glosario/centrifug
a. htm
[2] Colombia, E. y. (4 de Julio de 2018). Que es
una Centrífuga-equipos y laboratorio de
Colombia. Obtenido de
https://www.equiposylaboratorio.com/sitio/con
tenidos_mo.php?it=2251
[3] Crisol, E. d. (4 de Diciembre de 2017).
http://elcrisol.com.mx/centrifugas-
paralaboratorio-tipos-centrifugacion/.
Obtenido de
http://elcrisol.com.mx/centrifugas-
paralaboratorio-tipos-centrifugacion/
[4] Crisol, E. d.-E. (21 de Agosto de 2017). Te
presentamos los diferentes tipos de
centrífugas para laboratorio. Obtenido de
http://elcrisol.com.mx/te-presentamos-
losdiferentes-tipos-de-centrifugas-
paralaboratorio/
[5] Cyntia Coronado, a. S. (s.f.). Método de
Centrifugación. Obtenido de
file:///D:/DEI_hchaconp/Downloads/M%C3%
A9todo%20de%20centrifugaci%C3%B3n%20
quimica%20octavo%20a%20(1).pdf
[6] Doctossismo. (s.f.).
http://www.doctissimo.com/es/salud/diccion
ari o-medico/ultracentrifugacion. Obtenido
de
http://www.doctissimo.com/es/salud/diccion
ari o-medico/ultracentrifugacion](https://image.slidesharecdn.com/revistapaper1-180916143704/85/Revista-paper-1-64-320.jpg)
![64
[7] Dr. Roberto Hernánde Sampíeri, D. C.
(2014). Metodología de la Investigación.
México D.F.: McGraw-Hill.
[8] Dr. Roberto Hernández Sampieri, D. C.
(2014). Metodología de la Investigación.
Sexta edición. México D.F.: Mc-Graw-Hill /
Interamericana Edditores S.A.
[9] Galeano, A. (30 de Abril
de 2015).
http://www.esacademic.com/dic.nsf/es_medi
cl
opedia/21301. Obtenido de
http://www.esacademic.com/dic.nsf/es_medicl
opedia/21301
[10] Gardey, J. P. (2009). Definición de
observación - Que es, significado y concepto.
Obtenido de
https://definicion.de/observacion/
[11] Jazmin. (2 de Junio de 2014). Todo Sobre
Centrífugas-Metrix Laboratorios. Obtenido
de http://www.metrixlab.mx/todo-
sobrecentrifugas/
[12] Manual de centrífuga IEC HN-SII.
[13] M, M. (s.f.). Fuerza Centrífuga y Centrípeta:
energías circulares - VIX. Obtenido de
http://www.ojocientifico.com/3592/fuerzace
ntrifuga-y-centripeta-energias-circulares
[14] Patentados.com. (1 de Mayo de 1985).
Máquina Centrifugadora. Obtenido de
https://patentados.com/1985/maquinacentrifu
gadora
[15] PS, C. (29 de junio
de 2015).
https://prezi.com/wybtuy_upbvn/centrifugaci
on
-diferencial/. Obtenido de
https://prezi.com/wybtuy_upbvn/centrifugacion
-diferencial/
[16] Quercusblog. (13 de Junio de 2014). Tipos de
centrifugas de laboratorio-Quercuslab.es.
Obtenido de
https://quercuslab.es/blog/tiposde-centrifuga-
de-laboratorio/
[17] QuimiNet. (16 de Junio de 2008).
https://www.quiminet.com/articulos/losproce
sos-de-centrifugado-30638.htm. Obtenido de
https://www.quiminet.com/articulos/losproce
sos-de-centrifugado-30638.htm
[18] QuimiNet. (16 de Junio de
2008).
https://www.quiminet.com/articulos/losproce
sos-de-centrifugado-la-centrifugacion-
zonal-2564058.htm. Obtenido de
https://www.quiminet.com/articulos/losprocesos-
de-centrifugado-la-centrifugacionzonal-
2564058.htm
[19] Razo, C. M. (2011). Cómo Elaborar y
Asesorar una Investigación de Tesis. Ciudad
de México: Pearson Educación.
[20] Reference, W. (2018). Diccionario Español -
Wordreference.com. Obtenido de
http://www.wordreference.com/definicion/cent
rifuga
[21] Rojas, M. A. (15 de Junio de 2007).
http://132.248.9.34/hevila/HumanitasRevista
de investigacion/2007/vol4/no4/4.pdf.
Obtenido de
http://132.248.9.34/hevila/HumanitasRevista
de investigacion/2007/vol4/no4/4.pdf
[22]](https://image.slidesharecdn.com/revistapaper1-180916143704/85/Revista-paper-1-65-320.jpg)







Este documento describe cómo la combinación de robots submarinos con tecnologías emergentes como Internet de las Cosas e Inteligencia Artificial podría generar nuevas oportunidades para abordar problemas globales como la contaminación de los océanos y el cambio climático. La recopilación y análisis masivos de datos de los océanos conduciría a un desarrollo más sostenible y ayudaría a superar las limitaciones humanas para comprender el comportamiento de los océanos. La cuarta revolucción industrial fusionará tecnologías físic








![Diapositivas De La Historia Y Al Tecnologia[1]](https://cdn.slidesharecdn.com/ss_thumbnails/diapositivasdelahistoriayaltecnologia1-091022191949-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)










![Diapositivas De La Historia Y Al Tecnologia[1]](https://cdn.slidesharecdn.com/ss_thumbnails/diapositivasdelahistoriayaltecnologia1-091021190308-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)





































