Descargar para leer sin conexión
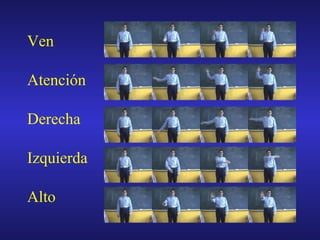










El documento describe las capacidades de reconocimiento de ademanes, voz y objetos de un robot. Explica cómo el robot puede reconocer ademanes mediante el seguimiento de manos y la extracción de características, reconocer comandos de voz usando herramientas estándar de síntesis y reconocimiento de voz, y reconocer objetos almacenando y emparejando características visuales. También detalla la capacidad del robot para identificar personas basada en el reconocimiento de siluetas usando visión estéreo.


























![Trabajo Naturalesa Cientificos[1]](https://cdn.slidesharecdn.com/ss_thumbnails/trabajonaturalesacientificos1-091113081502-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)




















