Descargado 640 veces


![4
LICENCIA
Casanova Alejandro ([www.infopic.comlu.com][inf.pic.suky@live.com.ar])
Algunos derechos reservados
Obra liberada bajo licencia Creative Commons by-nc-sa.
Reconocimiento - NoComercial - CompartirIgual (by-nc-sa):
En cualquier explotaci´n de la obra autorizada por la licencia har´ falta reconocer la autor´ La
o a ıa.
explotaci´n de la obra queda limitada a usos no comerciales. La explotaci´n autorizada incluye
o o
la creaci´n de obras derivadas siempre que mantengan la misma licencia al ser divulgadas.
o
M´s informaci´n:
a o
http://es.creativecommons.org/licencia/](https://image.slidesharecdn.com/tutorialc18-100823175058-phpapp01/85/Tutorial-c18-4-320.jpg)

























![24 CAP´
ITULO 2. COMENZANDO CON C18
DATABANK NAME = usb5 START =0 x500 END =0 x5FF PROTECTED
DATABANK NAME = usb6 START =0 x600 END =0 x6FF PROTECTED
DATABANK NAME = usb7 START =0 x700 END =0 x7FF PROTECTED
ACCESSBANK NAME = accesssfr START =0 xF60 END =0 xFFF PROTECTED
# IFDEF _CRUNTIME
SECTION NAME = CONFIG ROM = config
# IFDEF _ DE B UG DA TA S TA RT
STACK SIZE =0 x100 RAM = gpr2
# ELSE
STACK SIZE =0 x100 RAM = gpr3
# FI
# FI
¦
¥
Este define memoria de programa como page que se extiende desde 0x0000 a 0x7FFF. Dentro
de este espacio se pueden definir secciones code y romdata. Cuando se encuentra la directiva
#pragma code, el compilador genera instrucciones de c´digo maquina ubicadas en este sector. En
o
cambio #pragma romdata almacena datos en la memoria de programa.
La memoria de datos es definida por varios bancos de registros que contienen 256 bytes (gpr =
Registros de prop´sito general, usb = Registros para utilizaci´n de m´dulo USB (solo en ciertos
o o o
microcontroladores)). Dentro de estos bancos de datos podemos definir dos tipos de secciones,
udata e idata, donde udata indica datos sin inicializaci´n e idata datos inicializados.
o
Note que algunas ´reas est´n marcadas con PROTECTED, esto impide al enlazador ubicar
a a
instrucciones o datos en estos espacios a menos que se lo indique espec´
ıficamente.
En nuestro c´digo podemos definir sub-secciones utilizando la directiva #pragma:
o
§
# pragma udata [ attribute ] [ section - name [= address ]]
# pragma idata [ attribute ] [ section - name [= address ]]
# pragma romdata [ overlay ] [ section - name [= address ]]
# pragma code [ overlay ] [ section - name [= address ]]
¦
¥
attribute:
access: le indica al compilador que debe incluir la secci´n al espacio definido por el modo de
o
acceso a datos access bank sin necesidad de modificar el banco actual de la ram.
overlay: permite que otras secciones se sit´en en las mismas posiciones f´
u ısicas. Esto permite
conservar memoria situando variables en las mismas posiciones, siempre que no se activen
simult´neamente. Pero hay restricciones, las dos secciones deben pertenecer a ficheros distintos
a
y deben tener el mismo nombre.
Ejemplos:
§
# pragma code my_code =0 x100
void vFuncion ( char k ){
}
# pragma code
/* * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * */
# pragma romdata const_table =0 x3000
const rom char my_cons t_array [5] = { ’a ’ , ’b ’ , ’c ’ , ’d ’ , ’e ’ };](https://image.slidesharecdn.com/tutorialc18-100823175058-phpapp01/85/Tutorial-c18-32-320.jpg)
![2.8. SECCIONES 25
# pragma romdata
/* * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * */
# pragma udata access my_access
near unsigned char av1 , av2 ;
# pragma udata
/* * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * */
archivo1 . c :
# pragma udata overlay m y_ ov er l ay _d a ta =0 x200
int var1 , var2 ;
# pragma udata
archivo2 . c :
# pragma udata overlay m y_ ov er l ay _d a ta =0 x200
long var ;
# pragma udata
/* * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * */
# pragma idata my_idata =0 x500
char text []= Hola Mundo ;
# pragma idata
¦
¥
Tambi´n podemos crear secciones modificado el archivo *.lkr del microcontrolador utilizado,
e
subdividiendo un determinado banco:
§
DATABANK NAME = gpr1 START =0 x100 END =0 x1EF
DATABANK NAME = gpr1_ START =0 x1F0 END =0 x1FF PROTECTED
# IFDEF _CRUNTIME
SECTION NAME = CONFIG ROM = config
SECTION NAME = MISECCION RAM = gpr1_
...
¦
¥
gpr1 es un banco de 16 bytes que posteriormente se le denomina como secci´n MISECCION.
o
Como dijimos anteriormente con PROTECTED impedimos que el enlazador asigne autom´tica- a
mente otras variables no indicadas por el programador (usuario) en la secci´n creada. Y para
o
asignar variables a tal espacio hacemos:
§
# pragma udata MISECCION
char k ;
# pragma udata
¦
¥
En el caso de necesitar crear un arreglo de variables (v´ase m´s adelante) de un tama˜o mayor
e a n
a 256 bytes si o si debemos unir 2 o m´s de estos bancos para permitirle al enlazador (linker)
a
ubicarlo en el espacio de memoria.
§
DATABANK NAME = gpr1_ START =0 x100 END =0 x2FF
// DATABANK NAME = gpr2 START =0 x200 END =0 x2FF
# IFDEF _CRUNTIME
SECTION NAME = CONFIG ROM = config
SECTION NAME = MISECCION RAM = gpr1_
...
¦
¥
Se unen los bancos gpr1 y gpr2 para formar gpr1 que contiene 512 bytes.
§
# pragma udata MISECCION
char k [512];](https://image.slidesharecdn.com/tutorialc18-100823175058-phpapp01/85/Tutorial-c18-33-320.jpg)



![2.12. ARREGLOS DE VARIABLES 29
2.12. Arreglos de Variables
Nos permite trabajar con un conjunto de variables y acceder a cada una mediante un ´
ındice
unico que lo identifica. Todos los valores que contienen deben ser del mismo tipo.
´
§
unsigned char Vector [5];
unsigned char Matriz [3][3];
.
.
.
// Cargamos vector y matriz :
Vector [0]=156;
Matriz [1][1]=85;
// Leemos vector y matriz :
PORTB = Vector [4];
PORTB = Matriz [0][0];
¦
¥
En la declaracion se pueden pre cargar los valores de la siguiente forma:
§
unsigned char Vector [3]={1 ,0 x10 ,0 b000101 }
unsigned char Matriz [3][3]={1 ,2 ,3 ,4 ,5 ,6 ,7 ,8 ,9};
¦
¥
2.13. Cuarto Ejemplo, Control de display 7 segmentos
2.13.1. Objetivo
Utilizaremos dos pulsadores para incrementar, decrementar o resetear un conteo de 0 a 9 que
mostraremos en un display de 7 segmentos de c´todo com´n. El reseteo ser´ el caso en el que se
a u a
presiona los dos pulsadores a la vez.](https://image.slidesharecdn.com/tutorialc18-100823175058-phpapp01/85/Tutorial-c18-37-320.jpg)
![30 CAP´
ITULO 2. COMENZANDO CON C18
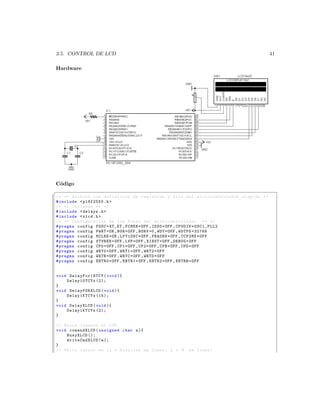
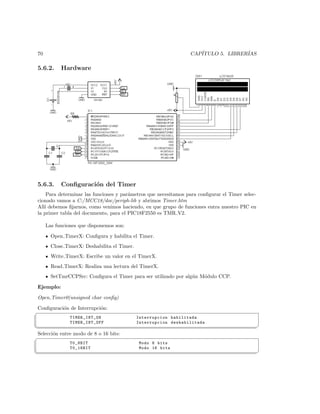
2.13.2. Hardware
2.13.3. C´digo
o
§
/* ** Archivo con definicion de registros y bits del mi c r o c o n t r o l a d o r elegido */
# include p18f2550 .h
/* ** Include para realizacion de demoras ** */
# include delays .h
/* ** Configuracion de los Fuses del m i c r o c o n t r o l a d o r ** */
# pragma config FOSC = XT_XT , FCMEN = OFF , IESO = OFF , CPUDIV = OSC1_PLL2
# pragma config PWRT = ON , BOR = OFF , BORV =0 , WDT = OFF , WDTPS =32768
# pragma config MCLRE = ON , LPT1OSC = OFF , PBADEN = OFF , CCP2MX = OFF
# pragma config STVREN = OFF , LVP = OFF , XINST = OFF , DEBUG = OFF
# pragma config CP0 = OFF , CP1 = OFF , CP2 = OFF , CPB = OFF , CPD = OFF
# pragma config WRT0 = OFF , WRT1 = OFF , WRT2 = OFF
# pragma config WRTB = OFF , WRTC = OFF , WRTD = OFF
# pragma config EBTR0 = OFF , EBTR1 = OFF , EBTR2 = OFF , EBTRB = OFF
unsigned char i ; // Para controlar vizualizacion del Display . -
// Solo a modo de ejemplo ubicamos variables constantes en 0 x400
# pragma romdata Display =0 x400
const rom unsigned char Display7Seg [10]={0 x3F , 0 x06 , 0 x5B , 0 x4F , 0 x66 ,
0 x6D , 0 x7D , 0 x07 , 0 xFF , 0 x6F };
# pragma romdata
void main ( void ){
ADCON1 =0 x0F ; // Todos entrada / salida digitales . -
TRISA =0 xFF ; // Todos como entrada . -
TRISB =0 X00 ; // Todos como salida . -
LATB =0 x3F ; // Comienza en cero . -
i =0;
while (1){
// Si se presionan los 2 a la vez se resetea . -
if ( PORTAbits . RA0 ==0 PORTAbits . RA1 ==0){
i =0;
// Cargamos en puerto valor de la tabla indicado por i . -
LATB = Display7Seg [0];
Delay10KTCYx (30);](https://image.slidesharecdn.com/tutorialc18-100823175058-phpapp01/85/Tutorial-c18-38-320.jpg)
![2.13. CUARTO EJEMPLO, CONTROL DE DISPLAY 7 SEGMENTOS 31
} else if ( PORTAbits . RA0 ==0){ // Se incrementa cuenta . -
++ i ;
// Volvemos a 0. Directamente se puede hacer if (++ i ==10)
if ( i ==10){ i =0;}
// Cargamos en puerto valor de la tabla indicado por i . -
LATB = Display7Seg [ i ];
Delay10KTCYx (30);
} else if ( PORTAbits . RA1 ==0){ // Se decrementa cuenta . -
--i ;
if ( i ==255){ i =9;} // Volvemos a 9.
// Cargamos en puerto valor de la tabla indicado por i . -
LATB = Display7Seg [ i ];
Delay10KTCYx (30);
}
}
}
¦
¥
Yendo a View/Wach y agregando la variable Display podemos visualizar que sea a asignado
al espacio de memoria de programa ubicado entre 0x400 y 0x409.](https://image.slidesharecdn.com/tutorialc18-100823175058-phpapp01/85/Tutorial-c18-39-320.jpg)



![´ ˜
3.2. EJEMPLO, CONTROL DE VARIOS DISPLAY, MULTIPLEXION DE LA SENAL 35
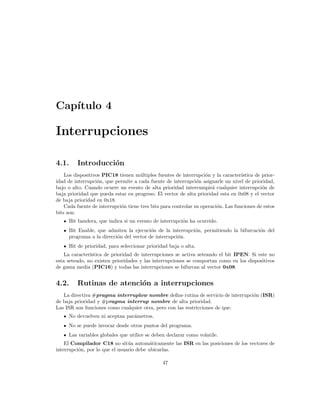
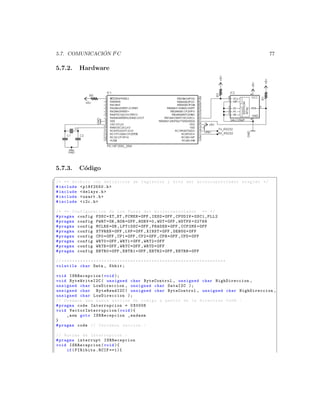
3.2. Ejemplo, Control de varios display, multiplexi´n de la
o
se˜ al
n
3.2.1. Objetivo
Controlar 3 display de 7 segmentos visualizando el conteo autom´tico de 0 a 999.
a
3.2.2. Hardware
3.2.3. C´digo
o
§
/* ** Archivo con definicion de registros y bits del mi c r o c o n t r o l a d o r elegido */
# include p18f2550 .h
/* ** Include para realizacion de demoras ** */
# include delays .h
/* ** Configuracion de los Fuses del m i c r o c o n t r o l a d o r ** */
# pragma config FOSC = XT_XT , FCMEN = OFF , IESO = OFF , CPUDIV = OSC1_PLL2
# pragma config PWRT = ON , BOR = OFF , BORV =0 , WDT = OFF , WDTPS =32768
# pragma config MCLRE = ON , LPT1OSC = OFF , PBADEN = OFF , CCP2MX = OFF
# pragma config STVREN = OFF , LVP = OFF , XINST = OFF , DEBUG = OFF
# pragma config CP0 = OFF , CP1 = OFF , CP2 = OFF , CPB = OFF , CPD = OFF
# pragma config WRT0 = OFF , WRT1 = OFF , WRT2 = OFF
# pragma config WRTB = OFF , WRTC = OFF , WRTD = OFF
# pragma config EBTR0 = OFF , EBTR1 = OFF , EBTR2 = OFF , EBTRB = OFF
// Para controlar vizualizacion del Display . -
unsigned char i , Unidad , Decena , Centena ;
const rom unsigned char Display7Seg [10]={0 x3F , 0 x06 , 0 x5B , 0 x4F , 0 x66 ,
0 x6D , 0 x7D , 0 x07 , 0 xFF , 0 x6F };
/* ** Declaracion de funcion a utilizar */
void Visualizacion ( void );
void main ( void ){
ADCON1 =0 x0F ; // Todos entrada / salida digitales . -
TRISA =0 xF0 ;
TRISB =0 x00 ; // Todos como salida . -](https://image.slidesharecdn.com/tutorialc18-100823175058-phpapp01/85/Tutorial-c18-43-320.jpg)
![36 CAP´
ITULO 3. FUNCIONES
LATA =0 x00 ; // Comienza en 0
Unidad =0;
Decena =0;
Centena =0;
while (1){
// Llamamos funcion que actualiza displays . -
Visualizacion ();
// Actualizamos cuenta . -
++ Unidad ;
if ( Unidad ==10){
Unidad =0;
++ Decena ;
if ( Decena ==10){
Decena =0;
++ Centena ;
}
}
}
}
// Solo a modo ejemplo colocamos funcion en la direccion 0 x1000 ..
// .. de la memoria de programa ;
# pragma code Funcion =0 x1000
void Visualizacion ( void ){
for ( i =1; i =20;++ i ){
// Cargamos en puerto valor de la tabla indicado por Unidad . -
LATB = Display7Seg [ Unidad ];
LATAbits . LATA0 =1; // Enciendo Display Unidad . -
Delay1KTCYx (5); // Demora de 5 ms ( XT =4 MHz )
LATAbits . LATA0 =0;
LATB = Display7Seg [ Decena ];
LATAbits . LATA1 =1;
Delay1KTCYx (5);
LATAbits . LATA1 =0;
LATB = Display7Seg [ Centena ];
LATAbits . LATA2 =1;
Delay1KTCYx (5);
LATAbits . LATA2 =0; // Apago Display Centena . -
}
}
# pragma code
¦
¥
Si abrimos la ventana Disassembly Listing (View/...) y buscamos la funci´n, podemos notar
o
en la primer columna que la misma se inicia en la direcci´n indicada.
o
3.3. Preprocesador y Directivas del preprocesador
El preprocesador es el primer programa que se llama en la etapa de compilaci´n de un pro-
o
grama. El preprocesador tiene su propio lenguaje y sus directivas inician con un #.
Las ventajas que tiene usar el preprocesador son:
los programas son m´s f´ciles de desarrollar,
a a](https://image.slidesharecdn.com/tutorialc18-100823175058-phpapp01/85/Tutorial-c18-44-320.jpg)

![38 CAP´
ITULO 3. FUNCIONES
# include p30fxxxx .h
# elif defined ( __dsPIC33F__ )
# include p33Fxxxx .h
# elif defined ( __PIC24H__ )
# include p24Hxxxx .h
# elif defined ( __PIC24F__ )
# include p24Fxxxx .h
# endif
¦
¥
——
§
// Para no utilizar pin RW sacar comentario a la siguiente linea . -
// # define __L CD _ DO NT _W A IT
# define LCD_PIN_E LATCbits . LATC4
# define LCD_PIN_RS LATCbits . LATC2
# ifndef __ LC D_ D ON T_ WA I T
# define LCD_PIN_RW LATCbits . LATC3
# endif
¦
¥
——
§
// CCS
# if defined ( __PCH__ )
char Buffer [512];
# endif
// C18
# ifdef __18CXX
# pragma udata =0 x100
unsigned char Buffer [512];
# pragma udata
# endif
// C30 y C32
# if defined ( __C30__ ) || defined ( __PIC32MX__ )
unsigned char __attribute__ (( aligned (4))) Buffer [512];
# endif
¦
¥
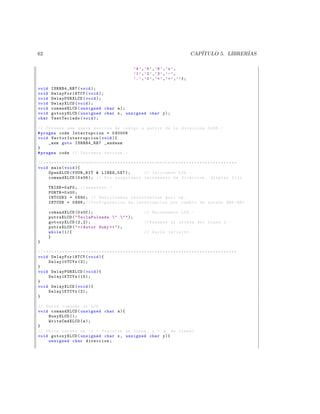
3.4. Ejemplo, Control de varios display, utilizando directi-
vas de preprocesador
3.4.1. Objetivo
Se realiza el mismo ejemplo anterior pero utilizando directivas de preprocesador, definiendo
el hardware a utilizar. Realizandolo de esta manera es mucho m´s sencillo realizar cualquier
a
modificaci´n en el c´digo del hardware utilizado.
o o
3.4.2. C´digo
o
§
/* ** Archivo con definicion de registros y bits del mi c r o c o n t r o l a d o r elegido */
# include p18f2550 .h
/* ** Include para realizacion de demoras ** */
# include delays .h](https://image.slidesharecdn.com/tutorialc18-100823175058-phpapp01/85/Tutorial-c18-46-320.jpg)
![3.4. EJEMPLO, CONTROL DE VARIOS DISPLAY, UTILIZANDO DIRECTIVAS DE PREPROCESADOR39
/* ** Configuracion de los Fuses del m i c r o c o n t r o l a d o r ** */
# pragma config FOSC = XT_XT , FCMEN = OFF , IESO = OFF , CPUDIV = OSC1_PLL2
# pragma config PWRT = ON , BOR = OFF , BORV =0 , WDT = OFF , WDTPS =32768
# pragma config MCLRE = ON , LPT1OSC = OFF , PBADEN = OFF , CCP2MX = OFF
# pragma config STVREN = OFF , LVP = OFF , XINST = OFF , DEBUG = OFF
# pragma config CP0 = OFF , CP1 = OFF , CP2 = OFF , CPB = OFF , CPD = OFF
# pragma config WRT0 = OFF , WRT1 = OFF , WRT2 = OFF
# pragma config WRTB = OFF , WRTC = OFF , WRTD = OFF
# pragma config EBTR0 = OFF , EBTR1 = OFF , EBTR2 = OFF , EBTRB = OFF
/* ** Definiciones para preprocesador ** */
// Pin para control display visualizador de unidades .
# define DISPLAY_PIN_U LATAbits . LATA0
# define DISPLAY_PIN_D LATAbits . LATA1
# define DISPLAY_PIN_C LATAbits . LATA2
# define DISP LAY_TRIS _U TRISAbits . TRISA0 //
# define DISP LAY_TRIS _D TRISAbits . TRISA1
# define DISP LAY_TRIS _C TRISAbits . TRISA2
// Puerto para enviar data a displays .
# define DISPLAY_DATA LATB
# define D I S P L A Y _ T R I S _ D A T A TRISB
/* * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * */
// Para controlar vizualizacion del Display . -
unsigned char i , Unidad , Decena , Centena ;
const rom unsigned char Display7Seg [10]={0 x3F , 0 x06 , 0 x5B , 0 x4F , 0 x66 ,
0 x6D , 0 x7D , 0 x07 , 0 xFF , 0 x6F };
/* ** Declaracion de funcion a utilizar */
void Visualizacion ( void );
void main ( void ){
ADCON1 =0 x0F ; // Todos entrada / salida digitales . -
D I S P L A Y _ T R I S _ D A T A =0 x00 :
DISP LAY_TRIS _U =0;
DISP LAY_TRIS _D =0;
DISP LAY_TRIS _C =0;
DISPLAY_PIN_U =0;
DISPLAY_PIN_D =0;
DISPLAY_PIN_C =0;
Unidad =0;
Decena =0;
Centena =0;
while (1){
// Llamamos funcion que actualiza displays . -
Visualizacion ();
// Actualizamos cuenta . -
++ Unidad ;
if ( Unidad ==10){
Unidad =0;
++ Decena ;
if ( Decena ==10){
Decena =0;
++ Centena ;](https://image.slidesharecdn.com/tutorialc18-100823175058-phpapp01/85/Tutorial-c18-47-320.jpg)
![40 CAP´
ITULO 3. FUNCIONES
}
}
}
}
void Visualizacion ( void ){
for ( i =1; i =20;++ i ){
// Cargamos en puerto valor de la tabla indicado por Unidad . -
DISPLAY_DATA = Display7Seg [ Unidad ];
DISPLAY_PIN_U =1; // Enciendo Display Unidad . -
Delay1KTCYx (5); // Demora de 5 ms ( XT =4 MHz )
DISPLAY_PIN_U =0;
DISPLAY_DATA = Display7Seg [ Decena ];
DISPLAY_PIN_D =1;
Delay1KTCYx (5);
DISPLAY_PIN_D =0;
DISPLAY_DATA = Display7Seg [ Centena ];
DISPLAY_PIN_C =1;
Delay1KTCYx (5);
DISPLAY_PIN_C =0; // Apago Display Centena . -
}
}
¦
¥
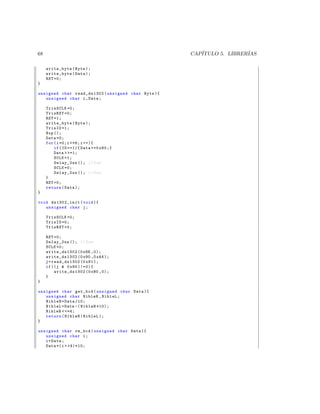
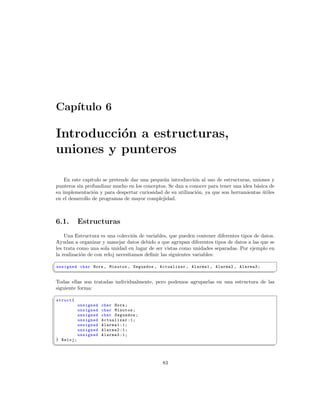
3.5. Control de LCD
Para realizar el control de un LCD necesitamos usar la librer´ xlcd.h ubicada en C:/MCC18/h.
ıa
Esta librer´ es para un LCD con controlador Hitachi HD44780 o compatible, utilizando 8 o 4 bits
ıa
de ancho de bus para envio/recepci´n de datos. El usuario debe proveer 3 delay para el correcto
o
funcionamiento, DelayPORXLCD() de 15ms, DelayXLCD() de 5ms y DelayFor18TCY() de 18
Tcy.
En este caso no vamos a modificar la librer´ (V´ase m´s adelante), pues lo vamos a controlar
ıa e a
con el puerto B, configuraci´n por defecto, pero en el caso de que se modifique sugiero siempre
o
respaldarla con una copia de seguridad.
3.5.1. Ejemplo, control de LCD
Objetivo
Vamos a escribir un simple mensaje en un LCD. Se crear´n 2 funciones adicionales para un
a
mejor el control, la primeria seria el env´ de comandos, con una previa espera de disponibilidad
ıo
del LCD y la segunda es para controlar la posici´n del cursor en el LCD.
o](https://image.slidesharecdn.com/tutorialc18-100823175058-phpapp01/85/Tutorial-c18-48-320.jpg)


![44 CAP´
ITULO 3. FUNCIONES
C´digo
o
§
/* ** Archivo con definicion de registros y bits del mi c r o c o n t r o l a d o r elegido */
# include p18f2550 .h
/* ** Includes ** */
# include delays .h
# include xlcd .h
# include stdlib .h // Libreria para conversiones a string
# include adc .h
/* ** Configuracion de los Fuses del m i c r o c o n t r o l a d o r ** */
# pragma config FOSC = XT_XT , FCMEN = OFF , IESO = OFF , CPUDIV = OSC1_PLL2
# pragma config PWRT = ON , BOR = OFF , BORV =0 , WDT = OFF , WDTPS =32768
# pragma config MCLRE = ON , LPT1OSC = OFF , PBADEN = OFF , CCP2MX = OFF
# pragma config STVREN = OFF , LVP = OFF , XINST = OFF , DEBUG = OFF
# pragma config CP0 = OFF , CP1 = OFF , CP2 = OFF , CPB = OFF , CPD = OFF
# pragma config WRT0 = OFF , WRT1 = OFF , WRT2 = OFF
# pragma config WRTB = OFF , WRTC = OFF , WRTD = OFF
# pragma config EBTR0 = OFF , EBTR1 = OFF , EBTR2 = OFF , EBTRB = OFF
void DelayFor18TCY ( void ){
Delay10TCYx (2);
}
void DelayPORXLCD ( void ){
Delay1KTCYx (15);
}
void DelayXLCD ( void ){
Delay1KTCYx (2);
}
// Envia comando al LCD
void comandXLCD ( unsigned char a ){
BusyXLCD ();
WriteCmdXLCD ( a );
}
// Ubica cursor en ( x = Posicion en linea , y = N de linea )
void gotoxyXLCD ( unsigned char x , unsigned char y ){
unsigned char direccion ;
if ( y != 1)
direccion = 0 x40 ;
else
direccion =0;
direccion += x -1;
comandXLCD (0 x80 | direccion );
}
void main ( void ){
unsigned int Canal0 , Canal1 ;
char String [4];
OpenXLCD ( FOUR_BIT LINES_5X7 ); // Iniciamos LCD . -
comandXLCD (0 x06 ); // Nos aseguramos incremento de direccion , display fijo
OpenADC ( ADC_FOSC_RC ADC_2_TAD ADC_RIGHT_JUST ,
A DC _R EF _ VD D_ VS S ADC_INT_OFF , ADC_2ANA );](https://image.slidesharecdn.com/tutorialc18-100823175058-phpapp01/85/Tutorial-c18-52-320.jpg)






![52 CAP´
ITULO 4. INTERRUPCIONES
Kbhit =1; // Indicamos que se ha recibido un dato . -
PIR1bits . RCIF =0; // Borramos bandera . -
}
}
void main ( void ){
unsigned int Canal0 , Canal1 ;
char String [4];
OpenUSART ( U S AR T _ T X _ I N T _ O F F US A RT _R X_ I NT _O N
U S A R T _ A S Y N C H _ M O D E U SA RT _ EI GH T_ B IT
USART_CONT_RX USART_BRGH_HIGH ,25); // 9600 ,8 , n ,1
OpenADC ( ADC_FOSC_RC ADC_2_TAD ADC_RIGHT_JUST ,
A DC _R EF _ VD D_ VS S ADC_INT_OFF , ADC_2ANA );
Kbhit =0;
RCONbits . IPEN =0; // Des habilita mos Prioridades
INTCONbits . PEIE =1; // Habilitamos interrupcion de perifericos . -
INTCONbits . GIE =1; // Habilitamos interrupcion Global .
putrsUSART ( Prueba Comunicacion Serial r );
while (1){
while ( Kbhit ==0){}; // esperamos a recibir dato . -
Kbhit =0;
switch ( Data ){
case 0 x61 : // letra a
SetChanADC (0); // Selecciono canal a convertir . -
// Delay10TCYx (1);//10 us para que se cargue el capacitor sample hold
ConvertADC (); // Comienza conversion . -
while ( BusyADC ()==1){} // Hasta que se finalice conversion . -
Canal0 = ReadADC (); // Realizo lectura . -
putrsUSART ( Canal 0 = );
itoa ( Canal0 , String ); // Convertimos entero a string . -
putsUSART ( String );
putrsUSART ( r );
break ;
case 0 x62 : // letra b
SetChanADC (1); // Selecciono canal a convertir . -
// Delay10TCYx (1);//10 us para que se cargue el capacitor sample hold
ConvertADC (); // Comienza conversion . -
while ( BusyADC ()==1){} // Hasta que se finalice conversion . -
Canal1 = ReadADC (); // Realizo lectura . -
putrsUSART ( Canal 1 = );
itoa ( Canal1 , String ); // Convertimos entero a string . -
putsUSART ( String );
putrsUSART ( r );
break ;
case 0 x63 : // letra c
SetChanADC (0); // Selecciono canal a convertir . -
// Delay10TCYx (1);//10 us para que se cargue el capacitor sample hold
ConvertADC (); // Comienza conversion . -
while ( BusyADC ()==1){} // Hasta que se finalice conversion . -
Canal0 = ReadADC (); // Realizo lectura . -
SetChanADC (1); // Selecciono canal a convertir . -
// Delay10TCYx (1);//10 us para que se cargue el capacitor sample hold
ConvertADC (); // Comienza conversion . -](https://image.slidesharecdn.com/tutorialc18-100823175058-phpapp01/85/Tutorial-c18-60-320.jpg)








![´
5.3. INTERRUPCION POR CAMBIO DE ESTADO RB4-RB7. CONTROL DE TECLADO MATRICIAL61
5.3.2. Hardware
Nota: Se usa el puerto C para el control del LCD, y para que la compilaci´n sea correcta se
o
deben seguir los pasos de la secci´n anterior.
o
5.3.3. C´digo
o
§
/* ** Archivo con definicion de registros y bits del mi c r o c o n t r o l a d o r elegido */
# include p18f4550 .h
# include delays .h
# include xlcd .h
/* ** Configuracion de los Fuses del m i c r o c o n t r o l a d o r ** */
# pragma config FOSC = XT_XT , FCMEN = OFF , IESO = OFF , CPUDIV = OSC1_PLL2
# pragma config PWRT = ON , BOR = OFF , BORV =0 , WDT = OFF , WDTPS =32768
# pragma config MCLRE = ON , LPT1OSC = OFF , PBADEN = OFF , CCP2MX = OFF
# pragma config STVREN = OFF , LVP = OFF , XINST = OFF , DEBUG = OFF
# pragma config CP0 = OFF , CP1 = OFF , CP2 = OFF , CPB = OFF , CPD = OFF
# pragma config WRT0 = OFF , WRT1 = OFF , WRT2 = OFF
# pragma config WRTB = OFF , WRTC = OFF , WRTD = OFF
# pragma config EBTR0 = OFF , EBTR1 = OFF , EBTR2 = OFF , EBTRB = OFF
unsigned char Tecla ;
const rom unsigned char Teclas [17]={ ’7 ’ , ’8 ’ , ’9 ’ , ’/ ’ ,](https://image.slidesharecdn.com/tutorialc18-100823175058-phpapp01/85/Tutorial-c18-69-320.jpg)
![´
5.4. UTILIZACION DE PRINTF PARA ESCRIBIR EN LCD 63
if ( y != 1)
direccion = 0 x40 ;
else
direccion =0;
direccion += x -1;
comandXLCD (0 x80 | direccion );
}
/* Rastrea Tecla presionada , para ello , se va colocando a 0 logico las filas
de a una por vez , y se testea si alguna columna tambien lo esta . Se utiliza
la variable i para indicar que tecla esta siendo testeada , y de esta manera
al detectar la pulsacion usar esta variable para seleccionar el caracter en
el Buffer Teclas .
*/
char TestTeclado ( void ){
unsigned char i , j ;
PORTB =0 x0E ; // xxxx1110 .
i =0;
for ( j =0; j 4; j ++){
if ( PORTBbits . RB4 ==0){ break ;}
i ++;
if ( PORTBbits . RB5 ==0){ break ;}
i ++;
if ( PORTBbits . RB6 ==0){ break ;}
i ++;
if ( PORTBbits . RB7 ==0){ break ;}
i ++;
LATB = PORTB 1; // Trasladamos el 0 a siguiente Pin .
}
return ( Teclas [ i ]);
}
// * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * *
// Rutina de Interrupcion . -
# pragma interrupt ISRRB4_RB7
void ISRRB4_RB7 ( void ){
if ( INTCONbits . RBIF ==1){
// Realizamos test del Teclado , y nos devuelve tecla pulsada
Tecla = TestTeclado ();
gotoxyXLCD (15 ,1);
putcXLCD ( Tecla ); // Visualizamos tecla pulsada .
// Esperamos a que se suelte . -
while ( PORTBbits . RB4 ==0 || PORTBbits . RB5 ==0 ||
PORTBbits . RB6 ==0 || PORTBbits . RB7 ==0){}
PORTB =0 x00 ;
INTCONbits . RBIF = 0; // Borramos bandera
}
}
¦
¥
5.4. Utilizaci´n de Printf para escribir en LCD
o
Para poder utilizar printf para formatear variables generando un string y enviarlo por ejemplo
al LCD hay que realizar un par de modificaciones sencillas. Compiler C18 para seleccionar la](https://image.slidesharecdn.com/tutorialc18-100823175058-phpapp01/85/Tutorial-c18-71-320.jpg)

![5.5. COMO CREAR UNA LIBRER´
IA 65
direccion =0;
direccion += x -1;
comandXLCD (0 x80 | direccion );
}
void main ( void ){
char Buffer [12]={ 2 linea ... };
unsigned char Variable =125;
OpenXLCD ( FOUR_BIT LINES_5X7 ); // Iniciamos LCD . -
comandXLCD (0 x06 ); // Nos aseguramos incremento de direccion , display fijo
comandXLCD (0 x0C );
OpenUSART ( U S A R T _ T X _ I N T _ O F F US AR T _R X_ IN T _O N U S A R T _ A S Y N C H _ M O D E
U SA RT _E I GH T_ BI T USART_CONT_RX USART_BRGH_HIGH ,25); // 9600 ,8 , n ,1
// Modificamos para utilizar funci ’ on del usuario , o sea escribir en LCD . -
stdout = _H_USER ;
// Convertimos a string variable . -
printf ( Var = %u , Variable );
gotoxyXLCD (1 ,2);
// Enviamos string ccntenido en buffer . -
printf ( %s , Buffer );
// Modificamos para utilizar nuevamente puerto serial .
stdout = _H_USART ;
printf ( Var = %u , Variable );
while (1){}
}
¦
¥
5.5. Como crear una librer´
ıa
Vamos a crear una librer´ para el control del circuito integrado ds1302, el cual es un reloj de
ıa
tiempo real con interface de comunicaci´n serial que nos permite leer o escribir registros internos
o
que contienen los segundos, minutos, horas, d´ de la semana, fecha, mes y a˜o.
ıa n
Para tener amplio conocimiento de c´mo funciona y como poder realizar la comunicaci´n con ´l,
o o e
como se ha venido recomendado, es necesario leer el datasheet. A groso modo se puede dar la idea
de que necesitamos realizar funciones para leer y escribir los registros internos del dispositivo, y
habr´ que leer si se necesita inicializarlo y de que modo se reciben los datos. Una vez entendido
a
el funcionamiento se pasa al proceso de realizar la librer´
ıa.
Un proceso adecuado en el armado de una librer´ es realizar dos archivos, un archivo cabecera
ıa
(*.h) que contendr´ definiciones para el funcionamiento (Pines para controlar el dispositivo y
a
otros para mejor entendimiento del c´digo) y la declaraci´n de las funciones, y un archivo fuente
o o
con la definici´n de las funciones y variables.
o
Para agilizar el proceso de compilaci´n se realiza lo siguiente:
o
§
# ifndef __ds1302_H
# define __ds1302_H
// Sentencias
# endif](https://image.slidesharecdn.com/tutorialc18-100823175058-phpapp01/85/Tutorial-c18-73-320.jpg)






![74 CAP´
ITULO 5. LIBRER´
IAS
// .. se imprime un 0 antes del valor .
void printDate ( unsigned char dow , unsigned char mth , unsigned char year ){
char String [4];
putrsXLCD ( Fecha : );
itoa ( dow , String ); // Convertimos entero a string . -
if ( dow 10){ putrsXLCD ( 0 );}
putsXLCD ( String ); putrsXLCD ( / );
itoa ( mth , String ); // Convertimos entero a string . -
if ( mth 10){ putrsXLCD ( 0 );}
putsXLCD ( String ); putrsXLCD ( / );
itoa ( year , String ); // Convertimos entero a string . -
if ( year 10){ putrsXLCD ( 0 );}
putsXLCD ( String );
}
// Funcion que imprime la Hora en el LCD . Toma los valores ingresados ,..
// .. los convierte a string y los imprime . En el caso que sea menor a 10 ,..
// .. se imprime un 0 antes del valor .
void printTime ( unsigned char hour , unsigned char min , unsigned char sec ){
char String [4];
putrsXLCD ( Hora : );
itoa ( hour , String ); // Convertimos entero a string . -
if ( hour 10){ putrsXLCD ( 0 );}
putsXLCD ( String ); putrsXLCD ( : );
itoa ( min , String ); // Convertimos entero a string . -
if ( min 10){ putrsXLCD ( 0 );}
putsXLCD ( String ); putrsXLCD ( : );
itoa ( sec , String ); // Convertimos entero a string . -
if ( sec 10){ putrsXLCD ( 0 );}
putsXLCD ( String );
}
// Funcion que realiza la lectura del todos los datos de la Fecha .
void get_date ( void ){ // Lee dia , mes , a ~ no
dow = get_dow ();
mth = get_mth ();
year = get_year ();
dow = get_dow ();
}
// Funcion que realiza la lectura del todos los datos de la Hora .
void get_time ( void ){ // lee hora , minuto , segundo
hour = get_hr ();
min = get_min ();
sec = get_sec ();
}
¦
¥
5.7. Comunicaci´n I2 C
o
Muchos de los dispositivos (memorias, RTC, sensores varios, conversor AD y DA, ect) que
utilizamos diariamente en el desarrollo de proyectos utilizan el bus I2 C. Este solo requiere dos
l´
ıneas de se˜al (Reloj y datos) y una de referencia (GND). Permite el intercambio de informaci´n
n o
entre muchos dispositivos a una velocidad aceptable, de unos 100 Kbits por segundo, aunque hay
casos especiales en los que el reloj llega hasta los 1 MHz.
Microchip nos provee las librer´ necesarias para poder controlar el m´dulo MSSP del micro-
ıas o](https://image.slidesharecdn.com/tutorialc18-100823175058-phpapp01/85/Tutorial-c18-82-320.jpg)




![80 CAP´
ITULO 5. LIBRER´
IAS
Este ack ordena a la memoria transmitir la pr´xima palabra de 8 bits secuencialmente direcciona-
o
da (Figura). Cuando se recibe el ultimo dato, el Master no generar´ un ack, pero generar´ una
´ a a
condici´n de alto. Para proveer las lecturas secu´nciales, la memoria contiene un puntero de
o e
direcci´n interno que es incrementado en uno en la terminaci´n de cada operaci´n.
o o o
5.7.5. C´digo
o
§
/* ** Archivo con definicion de registros y bits del mi c r o c o n t r o l a d o r elegido */
# include p18f2550 .h
# include delays .h
# include usart .h
# include i2c .h
/* ** Configuracion de los Fuses del m i c r o c o n t r o l a d o r ** */
# pragma config FOSC = XT_XT , FCMEN = OFF , IESO = OFF , CPUDIV = OSC1_PLL2
# pragma config PWRT = ON , BOR = OFF , BORV =0 , WDT = OFF , WDTPS =32768
# pragma config MCLRE = ON , LPT1OSC = OFF , PBADEN = OFF , CCP2MX = OFF
# pragma config STVREN = OFF , LVP = OFF , XINST = OFF , DEBUG = OFF
# pragma config CP0 = OFF , CP1 = OFF , CP2 = OFF , CPB = OFF , CPD = OFF
# pragma config WRT0 = OFF , WRT1 = OFF , WRT2 = OFF
# pragma config WRTB = OFF , WRTC = OFF , WRTD = OFF
# pragma config EBTR0 = OFF , EBTR1 = OFF , EBTR2 = OFF , EBTRB = OFF
// * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * *
volatile unsigned char Kbhit ;
volatile unsigned char BufferE [19];
unsigned char BufferL [19];
void ISRRecepcion ( void );
void BufferW riteI2C ( unsigned char ByteControl , unsigned char HighDireccion ,
unsigned char LowDireccion , unsigned char * DataI2C );
void BufferReadI2C ( unsigned char ByteControl , unsigned char HighDireccion ,
unsigned char LowDireccion , unsigned char * Valor , unsigned char Lengh );
// Creamos una nueva seccion de codigo a partir de la direccion 0 x08 . -
# pragma code Interrupcion = 0 X0008
void V e c t o r I n t e r r u p c i o n ( void ){
_asm goto ISRRecepcion _endasm
}
# pragma code // Cerramos seccion . -
// Rutina de Interrupcion . -
# pragma interrupt ISRRecepcion
void ISRRecepcion ( void ){](https://image.slidesharecdn.com/tutorialc18-100823175058-phpapp01/85/Tutorial-c18-88-320.jpg)
![´
5.7. COMUNICACION I2 C 81
if ( PIR1bits . RCIF ==1){
getsUSART ( BufferE ,19); // recibimos 19 caracteres . -
Kbhit =1; // Indicamos que se ha recibido un dato . -
PIR1bits . RCIF =0; // Borramos bandera . -
}
}
void main ( void ){
unsigned char i ;
OpenUSART ( U S A R T _ T X _ I N T _ O F F US AR T _R X_ IN T _O N U S A R T _ A S Y N C H _ M O D E
U SA RT _E I GH T_ B IT USART_CONT_RX USART_BRGH_HIGH ,25); // 9600 ,8 , n ,1
OpenI2C ( MASTER , SLEW_OFF ); // Master
SSPADD = 9; // 100 KHz para 4 MHz
Kbhit =0;
RCONbits . IPEN =0; // Des habilita mos Prioridades
INTCONbits . PEIE =1; // Habilitamos interrupcion de perifericos . -
INTCONbits . GIE =1; // Habilitamos interrupcion Global .
putrsUSART ( Prueba Comunicacion I2C con memoria 24 LC512 r r );
while (1){
while ( Kbhit ==0){}; // esperamos a recibir dato . -
Kbhit =0;
// Se guarda en memoria los datos recibidos .
Buff erWriteI 2C (0 xA0 ,0 x00 ,0 x00 , BufferE [0]);
Delay1KTCYx (5);
// Leemos de la memoria los datos guardados . -
BufferReadI2C (0 xA0 ,0 x00 ,0 x00 , BufferL [0] ,19);
putrsUSART ( Lectura de Eeprom : r );
putsUSART ( BufferL ); putrsUSART ( r );
}
}
// * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * *
void BufferWr iteI2C ( unsigned char ByteControl , unsigned char HighDireccion ,
unsigned char LowDireccion , unsigned char * BufferData ){
IdleI2C (); // El modulo esta activo ?
StartI2C (); // Condicion de START
while ( SSPCON2bits . SEN );
WriteI2C ( ByteControl ); // Envia Byte de control
WriteI2C ( HighDireccion );
WriteI2C ( LowDireccion );
putsI2C ( BufferData ); // Enviamos buffer a memoria .
StopI2C (); // Condicion de STOP
while ( SSPCON2bits . PEN );
while ( EEAckPolling ( ByteControl )); // Espera que se complete escritura .
}
void BufferReadI2C ( unsigned char ByteControl , unsigned char HighDireccion ,
unsigned char LowDireccion , unsigned char * Valor , unsigned char Lengh ){
IdleI2C (); // El modulo esta activo ?
StartI2C (); // Condicion de START
while ( SSPCON2bits . SEN );
WriteI2C ( ByteControl );](https://image.slidesharecdn.com/tutorialc18-100823175058-phpapp01/85/Tutorial-c18-89-320.jpg)



![86 CAP´ ´
ITULO 6. INTRODUCCION A ESTRUCTURAS, UNIONES Y PUNTEROS
UINT8 b12 :1;
UINT8 b13 :1;
UINT8 b14 :1;
UINT8 b15 :1;
};
} UINT16_VAL ;
¦
¥
Lo anterior corresponde a la definici´n de una uni´n an´nima que puede ser utilizada para
o o o
crear varias variables que implementen tal estructura.
§
UINT16_VAL k , j , Test ;
UINT16_VAL Buffer16Bits [5];
¦
¥
Todas las variables creadas se corresponden con la estructura definida:](https://image.slidesharecdn.com/tutorialc18-100823175058-phpapp01/85/Tutorial-c18-94-320.jpg)


![6.4. PUNTEROS 89
Con (unsigned char *) hacemos que la direcci´n obtenida de Variable sea tomada como a una
o
variable del tipo char, luego con *((..)Variable) transferimos el byte apuntado a la variable
LSB.
Punteros y arreglos
Si declaramos un arreglo como:
§
char Datos [10];
¦
¥
Declaramos un ptr:
§
char * ptr ;
¦
¥
Podemos asignar al puntero la primer posici´n del arreglo:
o
§
ptr = Datos [0];
¦
¥
Y podemos cargar a Datos[0] y Datos[5] de la siguiente manera:
§
* ptr =0 xAA ;
*( ptr +5)=0 x48 ;
¦
¥
Cargar un buffer dentro de otro:
§
unsigned int * ptr ,* ptr2 ;
unsigned int Datos01 [20] , Datos02 [5]={0 xFFAA ,0 xCC45 ,0 x7895 ,0 x3568 ,0 xCC21 };
ptr = Datos01 [8]; // Vamos a cargar en el arreglo 1 a partir de la posici ’ on 8. -
for ( ptr2 = Datos02 ; ptr2 Datos02 +5; ptr2 ++ , ptr ++){
* ptr =* ptr2 ;
}
¦
¥
Punteros y funciones
En C los argumentos de las funciones se pasan por valor, as´ que no deber´ de ser posible en
ı ıa
una funci´n modificar variables de la funci´n que la llama. Digo deber´ porque pruebas hechas en
o o ıa
C18 si lo permite Grin pero vamos a tratar C convencional para que sirva para otras compiladores.
Usemos el ejemplo convencional para mostrar esto, por ejemplo si queremos reorganizar vari-
ables:
Forma incorrecta:
§
void funcion ( void ){
char a , b ;
a =10;
b =15;
swap (a , b );
}
void swap ( char q , char p ){](https://image.slidesharecdn.com/tutorialc18-100823175058-phpapp01/85/Tutorial-c18-97-320.jpg)
![90 CAP´ ´
ITULO 6. INTRODUCCION A ESTRUCTURAS, UNIONES Y PUNTEROS
char temp ;
temp = q ;
q=p;
p = temp ;
}
¦
¥
Como vemos estamos modificando variables de la funci´n que llama a swap. La forma correcta
o
es hacerlo por pasaje de referencia, o sea le entregamos a la funci´n swap la direcci´n de las
o o
variables:
§
void funcion ( void ){
char a , b ;
a =10;
b =15;
swap ( a , b );
}
void swap ( char *q , char * p ){
char temp ;
temp =* q ;
* q =* p ;
* p = temp ;
}
¦
¥
Tambi´n el uso de punteros en argumentos de funciones nos es sumamente util para que una
e ´
funci´n pueda retornar m´s de una variable entregando por referencia un arreglo.
o a
Por ejemplo en un arreglo colocamos el nombre de un archivo m´s su extensi´n, y queremos
a o
una funci´n que separe en dos arreglos distintos el nombre y la extensi´n:
o o
§
void funcion ( void ){
char NombreMasExt [13]= Tutorial . pdf ;
char Nombre [9] , Ext [4];
separamos ( NombreMasExt [0] , Nombre [0] , Ext [0]);
}
void separamos ( char * ptr , char * nptr , char * eptr ){
do {
* nptr ++=* ptr ++;
} while (* ptr != ’. ’ ); // Hasta que se direccione el ’. ’
// Siempre que se trabaje con string se debe indicar finalizacion con ’0 ’
* nptr = ’ 0 ’;
* ptr ++; // Pasamos a direccionar la siguiente letra , despues de ’. ’
do {
* eptr ++=* ptr ++;
} while (* ptr != ’ 0 ’ );
* eptr = ’ 0 ’;
}
¦
¥
Nota: Cuando se trabaja con string se debe tener en cuenta una posici´n que indica final del
o
string ’0’.](https://image.slidesharecdn.com/tutorialc18-100823175058-phpapp01/85/Tutorial-c18-98-320.jpg)


Este documento presenta un tutorial básico sobre el uso del compilador MPLAB C18 de Microchip para desarrollar programas en C para microcontroladores PIC. Explica conceptos como la instalación del entorno de programación, la creación de proyectos, el uso de operadores, estructuras de control y variables. También incluye cuatro ejemplos prácticos de código para el control de LEDs, displays y funciones.






















![Tutorial mplab 6x[1]](https://cdn.slidesharecdn.com/ss_thumbnails/tutorialmplab6x1-100829100829-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)


























