ARDUINO - LADDER - FLUID SIM P - PROYECTO CX3 RESET TEMP H1 ARDUINO.pdf
•
0 recomendaciones•20 vistas

programación de arduino uno r3 arduino, arduino ladder, arduino uno r3 arduino 1 arduino tutorial, como programar arduino, proyectos arduino, arduino ladder, programación de arduino, arduino project, arduino uno arduino tutorial, como programar arduino, proyectos arduino, arduino plc, introdución a arduino, arduino desde cero,

Recomendados
Recomendados
Más contenido relacionado
Similar a ARDUINO - LADDER - FLUID SIM P - PROYECTO CX3 RESET TEMP H1 ARDUINO.pdf
Similar a ARDUINO - LADDER - FLUID SIM P - PROYECTO CX3 RESET TEMP H1 ARDUINO.pdf (20)
Más de Jovanny Duque
Más de Jovanny Duque (20)
Último
Último (20)
ARDUINO - LADDER - FLUID SIM P - PROYECTO CX3 RESET TEMP H1 ARDUINO.pdf
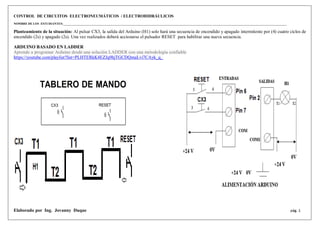
- 1. Elaborado por Ing. Jovanny Duque pág. 1 CONTROL DE CIRCUITOS ELECTRONEUMÁTICOS / ELECTROHIDRÁULICOS NOMBRE DE LOS ESTUDIANTES:___________________________________________________________________________________________________________________________________________________ Planteamiento de la situación: Al pulsar CX3, la salida del Arduino (H1) solo hará una secuencia de encendido y apagado intermitente por (4) cuatro ciclos de encendido (2s) y apagado (2s). Una vez realizados deberá accionarse el pulsador RESET para habilitar una nueva secuencia. ARDUINO BASADO EN LADDER Aprende a programar Arduino desde una solución LADDER con una metodología confiable https://youtube.com/playlist?list=PLHTERkK4EZJq9hjTGCDQmaLvi7CAyk_q_
- 2. Elaborado por Ing. Jovanny Duque pág. 2 Circuito de control eléctrico
- 3. Elaborado por Ing. Jovanny Duque pág. 3 // CÓDIGO ARDUINO CASO 4 LED INTERMITENTE X4 OK /// TRATAMIENTO PREVIO //DECLARACION DE VARIABLES //Declaración de las variables Ki corresponden a las relés/memorias utilizadas para el circuito/programa //Declaración de las variables Si corresponden a las Entradas de pulsador NO (Normalmente abiertos) utilizadas para el circuito/programa , la designación H corresponde al pin de salidas acoplada a un LED int K1=0; int K2=0; int K3=0; // Las memorias se declaran en estado inicial bajo o false. int RESET=6; // Pin de entrada, hará la función del pulsador de RESET- Ver Conexión de Entradas y Salidas int CX3=7 ; // Pin de entrada, hará la función del pulsador de CX3 - Ver Conexión de Entradas y Salidas int H1 = 2; // Pin de salida del LED - Ver Conexión de Entradas y Salidas // Variables asociadas a "temp1". int T1 = 0; // Bit/memoria asociado al temporizador 1 se establece a estado 1 cuando transcurre el tiempo1 establecido int tiempo1 = 1500; // Tiempo asignado a la Temporización 1 en este caso (1,5 seg = 1500 milisegundos). int activado1 = 0; // Al principio no ha sido activado. long inicio1, final1, actual1;
- 4. Elaborado por Ing. Jovanny Duque pág. 4 // Variables asociadas a "temp2". int T2= 0 ; // Bit/memoria asociado al temporizador 1 se establece a estado 1 cuando transcurre el tiempo2 establecido int tiempo2 = 1000; // Tiempo asignado a la Temporización 2 en este caso (1 seg = 1000 milisegundos). int activado2 = 0; // Al principio no ha sido activado. long inicio2, final2, actual2; // Variables asociadas al Contador 1 int CONTADOR1 = 0; // Variable entera que guarda el número de ciclos transcurridos const int PSCONTADOR1 = 4; // Preselect del Contador o número de ciclos a realizar int ESTADOPREVIO_T1 = 0; // Estado previo del componente que incrementa el contador, en este caso T1 int CONT1=0; // Es la variable(memoria) que se activa cuando se cumplen los ciclos, cuando (CONTADOR1 >=PSCONTADOR1)
- 5. Elaborado por Ing. Jovanny Duque pág. 5 void setup() { //Apertura del visualizador serial con el fin de visualizar el número de ciclos en el "Monitor serie" Serial.begin(9600); //Declaración de puertos (pines) digitales tanto de entrada como de salida pinMode(6, INPUT); pinMode(7, INPUT); pinMode(2, OUTPUT); //Algunos dispositivos traen una configuración "Sinking and Sourcing" //por eso es necesario colocar los puertos de salida en 0v o en estado bajo. //Declaración del estado inicial de los pines/puertos de las salidas en bajo/apagadas digitalWrite(H1, 0); } //TRATAMIENTO SECUENCIAL void loop() { // Inicio del Void Loop // LECTURA DE LOS ESTADOS DE LOS PINES DE ENTRADA //Capturar valores de puertos digitales de entrada con el fin de // asignar el estado de los pines de entrada a las variables RESET y CX3 RESET= digitalRead(6); CX3= digitalRead(7);
- 6. Elaborado por Ing. Jovanny Duque pág. 6 //TRATAMIENTO SECUENCIAL // Declaración de las ecuaciones booleanas equivalentes de cada línea eléctrica (relé,temporizador o contador) // Cada línea del circuito eléctrico (lógica cableada) tiene su ecuación booleana equivalente (lógica programada). if ((CX3 | K1 | T2) & (!CONT1) & (!T1)) {K1=1;} else {K1=0;} if (K1) {activetemp1(); } // Si se activa K1 se ejecuta la Subrutina/Subprograma de temporización "void activetemp1()" else {desactivetemp1();} // Si K1 esta inactivo se ejecuta la Subrutina/Subprograma de temporización "void desactivetemp1()" if ((T1 | K2) & (!K3)) {K2=1;}
- 7. Elaborado por Ing. Jovanny Duque pág. 7 else {K2=0;} if (K2) {activetemp2(); } // Si se activa K2 se ejecuta la Subrutina/Subprograma de temporización "void activetemp2()" else {desactivetemp2();} // Si K2 esta inactivo se ejecuta la Subrutina/Subprograma de temporización "void desactivetemp1()" if (T2) {K3=1;} else {K3=0;} if (T1 != ESTADOPREVIO_T1) { if(T1==1){ CONTADOR1++; Serial.print("Numero de Ciclos : "); Serial.println(CONTADOR1);} ESTADOPREVIO_T1 = T1; } if ( CONTADOR1 >=PSCONTADOR1) {CONT1=1;} else {CONT1=0;} if (RESET == 1) {CONTADOR1 = 0; CONT1=0;} Serial.print("Numero de Ciclos : "); Serial.println(CONTADOR1); }
- 8. Elaborado por Ing. Jovanny Duque pág. 8 // TRATAMIENTO POSTERIOR - ACTIVACIÓN DE LAS SALIDAS/ ACCIONES if (K1) {digitalWrite(H1, 1);} else {digitalWrite(H1, 0);} } // Fin del Void Loop //SUBRUTINAS DE TEMPORIZACIÓN (Para cada temporización se asigna un subprograma //activetempx y un desactivetempx usando para ello comparaciones con el comando millis //- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - //SUBRUTINA TEMPORIZADOR 1 //- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - void activetemp1() { if (activado1 == 0) { // activa y no ha sido activado=0 antes... activado1 = 1; // marca activado=1 y guarda el tiempo de inicio. inicio1 = millis(); final1 = inicio1 + tiempo1; // Transcurridos tiempo1 ( en este caso 2000 milisegundo=2s) } actual1 = millis(); // Consulta el tiempo actual. if (activado1 == 1 & (actual1 >= final1) ) {T1 = 1; } else { T1 = 0; } } void desactivetemp1() { T1 = 0;
- 9. Elaborado por Ing. Jovanny Duque pág. 9 activado1 = 0; inicio1 = 0; final1 = 0; actual1 = 0; } //- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - //SUBRUTINA TEMPORIZADOR 2 //- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - void activetemp2() { if (activado2 == 0) { // Si ha pulsado HIGH y no ha sido activado=0 antes... activado2 = 1; // marca activado=1 y guarda el tiempo de inicio. inicio2 = millis(); final2 = inicio2 + tiempo2; // Transcurridos tiempo2 ( en este caso 1000 milisegundo=1s) } actual2 = millis(); // Consulta el tiempo actual. if (activado2 == 1 & (actual2 >= final2) ) {T2 = 1;} else {T2 = 0;} } void desactivetemp2() { T2 = 0; activado2 = 0; inicio2 = 0; final2 = 0; actual2 = 0; } //- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
- 10. Elaborado por Ing. Jovanny Duque pág. 10 Jóvenes, este material ha sido elaborado con mucho gusto. Si te es útil Regálame un Like, comenta y suscríbete :) (っ◕‿◕) Te invito al CANAL DE YOUTUBE MEKATRONICA para conocer más http://www.youtube.com/c/JovannyDuque?sub_confirmation=1_ __________________________________ y Amigos/as en el BLOGG MEKATRONICA J DUKE podrás encontrar cantidad de recursos sobre SOLIDWORKS, HIDRÁULICA - ELECTROHIDRÁULICA , NEUMÁTICA, ELECTRONEUMÁTICA, CONTROL, PLC M221, PLC SIEMEMS S7 1200, PLC SIEMENS S7 300 , FLUID SIM FACTORY IO, entre otros https://mecatronica-itsa.blogspot.com/