Motor trifasico de 100 hp
•Descargar como DOCX, PDF•
2 recomendaciones•6,932 vistas

motor trifasico

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Destacado
Destacado (20)
Similar a Motor trifasico de 100 hp
Similar a Motor trifasico de 100 hp (20)
Último
Último (20)
Motor trifasico de 100 hp
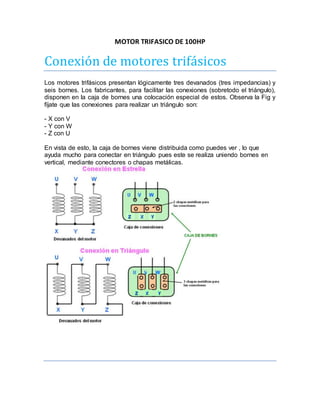
- 1. MOTOR TRIFASICO DE 100HP Conexión de motores trifásicos Los motores trifásicos presentan lógicamente tres devanados (tres impedancias) y seis bornes. Los fabricantes, para facilitar las conexiones (sobretodo el triángulo), disponen en la caja de bornes una colocación especial de estos. Observa la Fig y fíjate que las conexiones para realizar un triángulo son: - X con V - Y con W - Z con U En vista de esto, la caja de bornes viene distribuida como puedes ver , lo que ayuda mucho para conectar en triángulo pues este se realiza uniendo bornes en vertical, mediante conectores o chapas metálicas.
- 2. FUNCIONAMIENTO DE UN MOTOR ELÉCTRICO Cuando la corriente atraviesa los arrollamientos de las tres fases del motor, en el estator se origina un campo magnético que induce corriente en las barras del rotor. Dicha corriente da origen a un flujo que al reaccionar con el flujo del campo magnético del estator, originará un para motor que pondrá en movimiento al rotor. D i c ho m o vi m i e nt o e s c o nt i nuo , d e b i d o a l a s variaciones también continuas, de la corriente alterna trifásica. Solo debe hacerse notar que el rotor no puede ir a la misma velocidad que la del campo magnético giratorio. Esto se debe a que a cada momento recibe impulsos del campo, pero al cesar el empuje, el rotor se retrasa. A este fenómeno se le llamadeslizamiento.deslizamiento.deslizamiento.deslizamiento.deslizamiento.Desp ués de ese momento vendrá un nuevo empuje y un nuevo deslizamiento, y así sucesivamente. De esta manera se comprende que el rotor nunca logre alcanzar la misma velocidad del campo magnético giratorio. Es por lo cual recibe el nombre de asíncrono o asi ncróni co. El desli zami ento puede ser mayor conforme aumenta la carga del motor y lógicamente, la velocidad se reduce en una proporción mayor. Tipos y características del motor eléctrico trifásico
- 3. Si el rotor tiene la misma velocidad de giro que la del campo magnético rotativo, se dice que el motor es síncrono. Si por el contrario, el rotor tiene una velocidad de giro mayor o menor que dicho campo magnético rotativo, el motor es asíncrono de inducción. Los motores eléctricos trifásicos están conformados por dos grandes grupos: 1. Motores Síncronos 2. Motores Asíncronos Motores Síncronos: Este motor tiene la característica de que su velocidad de giro es directamente proporcional a la frecuencia de la red de corriente alterna que lo alimenta. Es utilizado en aquellos casos en donde se desea una velocidad constante. Las máquinas síncronas funcionan tanto como generadores y como motores. En nuestro medio sus aplicaciones son mínimas y casi siempre están relacionadas en la generación de energía eléctrica. Para el caso referente a la máquina rotativa síncrona, todas las centrales Hidroeléctricas y Termoeléctricas funcionan mediante generadores síncronos trifásicos. Para el caso del motor se usa principalmente cuando la potencia demandada es muy elevada, mayor que 1MW (mega vatio). Los motores síncronos se subdividen a su vez, de acuerdo al tipo del rotor que utilizan, siendo estos: rotor de polos lisos (polos no salientes) y de polos salientes. Motores de rotor de polos lisos o polos no salientes: se utilizan en rotores de dos y cuatro polos. Estos tipos de rotores están construidos al mismo nivel de la superficie del rotor. Los motores de rotor liso trabajan a elevadas velocidades. Rotor de polos no salientes en un motor síncrono Motores de polos salientes: Los motores de polos salientes trabajan a bajas velocidades. Un polo saliente es un polo magnético que se proyecta hacia fuera de la superficie del rotor. Los rotores de polos salientes se utilizan en rotores de cuatro o más polos.
- 4. Rotor de polos salientes en un motor síncrono Motor asíncrono: Los motores asíncronos o motores de inducción, son las máquinas de impulsión eléctrica más utilizadas, pues son sencillas, seguras y baratas. Los motores asíncronos se clasifican según el tipo de rotor, en motores de rotor en jaula de ardilla (o motores con inducido en cortocircuito) y en motores de rotor bobinado o de anillos rozantes. Motores de inducción asíncronos
- 5. En los motores asíncronos trifásicos, la energía eléctrica se suministra al bobinado del estator. Como consecuencia de ello, aparece un par aplicado al rotor, y éste girará. Estator de un motor asíncrono trifásico Sin lugar a dudas, como toda máquina puesta o no en servicio, la temperatura excesiva del ambiente o causada por un problema con el motor mismo, es un elemento clave a considerar, ya que de ella depende la vida útil de la máquina.
- 6. Motores Trifásicos Es una máquina eléctrica rotativa, capaz de convertir la energía eléctrica trifásica suministrada, en energía mecánica. La energía eléctrica trifásica origina campos magnéticos rotativos en el bobinado del estator (o parte fija del motor). Independientemente del tipo de motor trifásico del que se trate, todos los motores trifásicos convierten la energía eléctrica en energía mecánica. Cuando se va a conectar un motor trifásico (un ASCENSOR por ejemplo), el interesado debe solicitar, previo a firmar el contrato de servicio, la solicitud de determinación de capacidad del transformador y líneas de la empresa, con el fin de no afectar el servicio de los consumidores vecinos. Todos los motores de corriente alterna que operan ascensores o medios de transporte, deberán tener dispositivos de protección para evitar el arranque, si existe alguna de las condiciones siguientes: a) Si la rotación de fases no tiene el sentido correcto. b) Ausencia de alguna de las fases. Si el servicio es de 208Y/120 voltios, los motores de los servicios generales, deberán estar diseñados para este voltaje nominal, debido a que los motores con un voltaje de 240 voltios, no operan eficientemente en un sistema 208Y/120 voltios.
- 7. La potencia mecánica de los motores se expresa, ya sea en caballos de fuerza (HP) o en Kilowatts. La relación entre estas cantidades está dada por la expresión: Un caballo de fuerza es la unidad de potencia igual a 746 watts o 3300 lb – pie por minuto o 550 lb – pie por segundo. Un Watt (vatio), es la unidad base de la potencia eléctrica, en los motores grandes la potencia se indica en Kilowatts (Kw), por ejemplo, la salida de un motor de 100 HP es 73.6 Kw, ya que: 100 HP 746 w = 73.600 w = 73.6 Kw 1hp ARRANQUE DE UN MOTOR TRIFÁSICO Al energizar el motor, éste absorbe una gran intensidad (intensidad de arranque) pudiendo provocar, si las líneas de alimentación son insuficientes, una caída de tensión apreciable, es capaz de producir perturbaciones en otros receptores y aparatos de iluminación, por lo cual, cuando superan cierta potencia, el arranque ya no debe ser directo. El arranque de los motores trifásicos en cortocircuito, pueden ser conectados directamente a la red, en formas en cilla, por cuanto solamente los extremos de los devanados del estator tienen salida a la bornera. Teóricamente no existe razón alguna por la cual un motor no pueda arrancarse conectándolo directamente a la red de alimentación. El inconveniente que se presenta al hacerlo es que la corriente absorbida en el instante del arranque, puede llegar a alcanzar valores de hasta 7 veces la corriente nominal (In dato en HP = Kilowatts/0.746 Estas medidas cuantifican la cantidad de trabajo que un motor es capaz de desarrollar en un periodo especifico de tiempo. Dos son los factores importantes que determinan la potencia mecánica de salida en los motores: el par y la velocidad. Se define la potencia como el cociente del trabajo W (medi do en Joule) por el ti empo (t) (medi do en segundos) la ecuación de la potencia es: P = W / t
- 8. la placa del motor).Estas corrientes altas de por sí no perjudican al motor,siempre y cuando no se mantengan durante mucho tiempo, pero sí pueden ocasionar caídas de tensión en la red principal, a la vez que pueden dar lugar a un gran choque en la máquina accionada en el momento del arranque. Por este motivo es mucho mejor efectuar el arranque del motor a una tensión reducida, con el objeto de reducir la intensidad absorbida en el momento del arranque en la misma proporción. Para evitar que en estas circunstancias, la aceleración sea muy pequeña, es necesario que los dispositivos elegidos para el arranque tengan en cuenta la carga y se eviten períodos muy largos de aceleración, que pueden ocasionar calentamiento del motor, especialmente cuando esta maniobra debe repetirse con cierta frecuencia. Regulación de velocidad de los motores Variando el numero de polos del estator de la maquina, cambia la velocidad del campo giratorio y en consecuencia varia la velocidad de rotación del rotor. El procedimiento utiliza diversos devanados en el estator dependiendo de las velocidades que se quiera obtener; generalmente, por limitación de espacio de las ranuras suelen emplearse dos combinaciones diferentes, dando lugar a dos r.pm., asíncronas cercanas a 3.000, 1.500, 750, 500, etc., (a 50Hz). Para que el funcionamiento sea posible es preciso que el rotor sea jaula de ardilla, ya que este tipo de rotor adapta automáticamente por inducción su número de polos al existente en el estator. Con frecuencia se emplean dos escalones de velocidad en la relación 2:1, y con un solo devanado que se conmuta adecuadamente, lo que se denomina conexión Dahlander. También puede realizarse por variación de frecuencia La preferencia actual por la regulación a frecuencia variable se debe a la posibilidad de utilizar el sencillo y robusto motor de jaula de ardilla; cuyo mantenimiento es mucho más fácil que el de un motor de contactos deslizantes, lo que resulta muy importante en máquinas que operan bajo condiciones ambientales difíciles. Además este tipo de motor eléctrico resulta más económico y compacto que los restantes. Asimismo, este método permite transformar fácilmente un equipo de velocidad fija en un accionamiento de velocidad variable, sin realizar grandes modificaciones. Con este tipo de regulación se puede obtener un amplio control de velocidades, con el máximo par disponible en todas las frecuencias con un elevado rendimiento. Si se prolonga la característica al cuadrante generador se puede obtener un frenado muy eficiente por reducción de frecuencia, con una recuperación de energía hacia la red de alimentación. Si bien pueden utilizarse distintos tipos de
- 9. convertidores de frecuencia rotativos (semejantes al sistema Ward-Leonard), en la actualidad la modificación de la frecuencia se realiza fundamentalmente por medio de variadores estáticos electrónicos que ofrecen una regulación suave, permitiendo un aumento en la vida útil de todas las partes involucradas y originando un ahorro en el mantenimiento por ausencia de partes en movimiento que sufran desgastes. PROTECCIÓN DE LOS CIRCUITOS ELÉCTRICOS Toda instalación eléctrica tiene que estar dotada de una serie de protecciones que la hagan segura, tanto desde el punto de vista de los conductores y los aparatos a ellos conectados, como de las personas que han de trabajar con ella. Existen muchos tipos de protecciones, que pueden hacer a una instalación eléctrica completamente segura ante cualquier contingencia, pero hay tres que deben usarse en todo tipo de instalación: de alumbrado, domesticas, de fuerza, redes de distribución, circuitos auxiliares, etc., ya sea de baja o alta tensión. Estas tres protecciones eléctricas, que describiremos con detalle a continuación son: Protección contra sobrecargas. Protección contra electrocución. Protección contra cortocircuitos. Se denomina cortocircuito a la unión de dos conductores o partes de un circuito eléctrico, con una diferencia de potencial o tensión entre si, sin ninguna impedancia eléctrica entre ellos. Este efecto, según la Ley de Ohm, al ser la impedancia cero, hace que la intensidad tienda a infinito, con lo cual peligra la integridad de conductores y máquinas debido al calor generado por dicha intensidad, debido al efecto Joule. En la práctica, la intensidad producida por un cortocircuito, siempre queda amortiguada por la resistencia de los propios conductores que, aunque muy pequeña, nunca es cero. I = V / Z ( si Z es cero, I = infinito) Según los reglamentos electrotécnicos, "en el origen de todo circuito deberá colocarse un dispositivo de protección, de acuerdo con la intensidad de cortocircuito que pueda presentarse en la instalación". No obstante se admite una protección general contra cortocircuitos para varios circuitos derivados. Los dispositivos mas empleados para la protección contra cortocircuitos son: Fusibles calibrados (también llamados cortacircuitos), o Interruptores automáticos magnetotérmicos
- 10. PLANO DE UN ASCENSOR COMUN
- 11. Aun cuando la variedad de componentes eléctricos es muy amplia, los principales elementos de control son los que a continuación se mencionan: 1) Desconectadores (switches). 2) Interruptores termomagnéticos. 3) Desconectadores (switches) tipo tambor. 4) Estaciones de botones. 5) Relevadores de control. 6) Contactares magnéticos. 7) Fusibles y relevadores. 8) Lámparas piloto. 9) Switch de nivel, limite y otros tipos. 10) Resistencias, reactores, autotransformadores y capacitores. Es importante decir que el motor en sí, es sólo un medio de hacer funcionaruna máquina como por ejemplo,un elevadores, empaquetadora, embotelladora,movimiento de fajas, etc., por tanto, es necesarioprotegerlo por medio de dispositivosy accesorios que permitan la detección de fallas y buen funcionamiento del motor.