
Recomendados
Más contenido relacionado
Destacado
Destacado (11)
Similar a Robots y humanos
Similar a Robots y humanos (20)
Más de magguie25
Robots y humanos
- 1. Martes, 5 marzo 2013 Robótica Robots aprendiendo de los humanos, y viceversa Ocupar durante un día el puesto de otra persona nos puede ayudar a entender mejor las dificultades que afronta dicha persona en ese puesto. Ahora, este enfoque está siendo usado para hacer que humanos y robots puedan entenderse mejor y así poder trabajar juntos en equipo más eficazmente. En las fábricas, los robots son usados cada vez más para realizar tareas que los ponen en contacto más cercano con los humanos. Pero aunque se están haciendo muchos esfuerzos para garantizar que robots y humanos puedan trabajar con seguridad uno junto al otro, se necesita investigar más para crear robots lo bastante inteligentes como para trabajar con plena eficiencia en colaboración con humanos, tal como razona Julie Shah, profesora de aeronáutica y astronáutica en el Instituto Tecnológico de Massachusetts (MIT) en Cambridge, Estados Unidos, y jefa del Grupo de Robótica Interactiva en el Laboratorio de Ciencias de la Computación e Inteligencia Artificial (CSAIL), dependiente del MIT. La mayoría de las investigaciones existentes sobre modos de hacer que los robots sean mejores miembros de un equipo de trabajadores se basa esencialmente en la táctica de decirles a los robots si han hecho bien o mal una tarea, pero cada vez se tiende más a considerar que éste es un método poco eficiente de mejorar el trabajo de los robots y su integración en equipos integrados también por humanos.
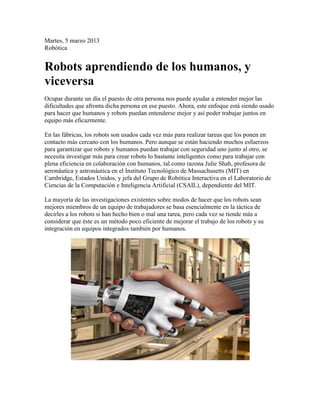
- 2. El nuevo método de entrenamiento conjunto permite que un robot y un humano trabajen mejor en equipo que mediante los métodos tradicionales usados para adiestrar robots. (Foto: MIT) Así que Shah y Stefanos Nikolaidis comenzaron a investigar si algunas de las técnicas que han dado buenos resultados al entrenar personas, se podían aplicar también a equipos mixtos de humanos y robots. Una de esas técnicas se basa en hacer que los miembros del equipo intercambien funciones en determinados días. Esto permite a las personas formarse una mejor idea sobre cómo sus funciones propias afectan a las de su compañero y a la inversa. El equipo de investigación diseñó un nuevo algoritmo que permite a los robots aprender de sus experiencias de intercambio de funciones. A tal fin, se procedió a modificar algoritmos de aprendizaje existentes para que los robots adquirieran no sólo información de realimentación positiva y negativa, sino también la información adicional obtenida durante el intercambio de funciones. El equipo de Shah y Nikolaidis ha realizado experimentos con un grupo mixto de humanos y robots, demostrando que esta forma de entrenamiento conjunto es tremendamente eficaz.