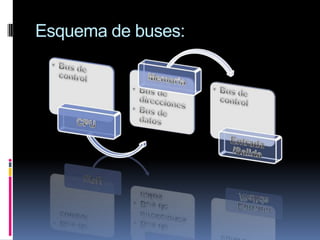
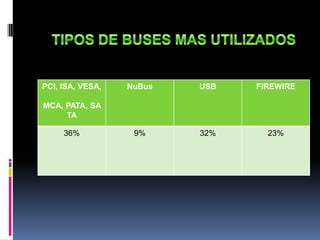
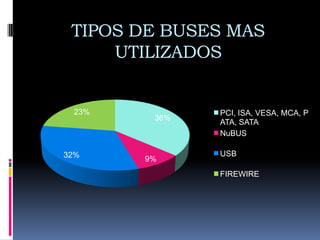
Este documento describe tres tipos de buses: buses de datos, que transfieren datos entre componentes de una computadora; buses de direcciones, que establecen la dirección de memoria de los datos; y buses de control. También discute las generaciones de buses de datos y los tipos más utilizados como PCI, ISA, USB y FireWire.