Este documento presenta un libro sobre la programación de autómatas programables SIEMENS utilizando el entorno TIA Portal. El libro contiene 8 unidades que cubren temas como operaciones lógicas, programación Grafcet, uso de temporizadores, contadores, transferencia de datos y programación estructurada. Además, incluye ejemplos prácticos y una simulación 3D para comprobar el funcionamiento de los programas.






















![Unidad 1- Entorno de programación TIA PORTAL
16
Recuerda • • •
En la ventana de
"Propiedades", es
donde se determina
toda la configuración
del elemento
seleccionado. En
función del elemento
seleccionado, este
dispondrá de más o
menos opciones.
• lnterfazPROFINETIX1]
Genera l
Direcciones Ethernet
Sincroniiación horaria
Modo de operación
► Avanzado
ID de hardware
• Ol 14fOQ 1 0
Genera l
► Entradi!ls digitales
► Salides digitales
Direcciones EfS
ID de hardware
► Al 2
► AQl Signal Board
► Conuidores rápidos (HSC}
► Generadores de impulsos(PlOff>Wi.4)
Arranque
Ciclo
carga por comunicación
Marces de sinema yde ciclo
► Servidor web
Idiomas de la inrenl!lz
Hora
Protección
RMursos de conexión
Sinóptico de dire-cciones
Nombre; 1 PLC_1
Autor: l
�V,
:::
oc
::
•=
n,
=
&
:::
Ra
;::m
:::;:
6n
===========�
Comentario "
...
...
V
Slot: 1
Rack: ;:@
e---::=====:::,
OescripCf6n abreviad!: �c:it>CJRly
--�
Oe-scripción: �maria de trabajo 75KB; fuente de
�
a limentación120/240V AC con 0114 x24V OC
SINK/SOURCE, DQlO Xrelé yAl2 integradas; 6
contadores rápidos y4 salidas de impulso integradas; ªª
Signal Board a mplía 1/0 integradas; hasUJ 3 m6dulos de
comunicación para comunicaci6n serie; hasta 8
módulos de seña les para a mpliación lf0; 0,04msl1000 .EJ
Rt-�rencia: 6ES7 21�1 8G40-0XB0
VPrsión di!' firmwa rl!': �
V
;.
4
;,;
·º
..:;;_______...;;¡¡¡¡¡¡¡¡¡¡¡¡=::;¡-=-'
1..-_....:k
=
tua-liza r dl!'scripci6n �
Fig.1.31
En esta área de Propiedades es donde se configura todo el hardware que contiene la
CPU con la que se está trabajando. Se puedenconfigurar las siguientes opciones:
•
•
•
•
•
•
•
•
Dirección de los puertos de comunicación.
Direccionado de las E/S tanto digitales como analógicas.
Configuración de las entradas de contaje rápido.
Configuración de las salidas de pulsos.
Configuración de los bits especiales, marcas de sistema y de ciclo.
Configuración para el uso del servidor web que integra.
Configuración de la hora de la CPU.
.. ./...
1.2.1 Configuración del hardware
En primer lugar, abrimos TIA Portal mediante el siguiente icono del escritorio:
TIA Portal V14
Fig.1.32
A partir de aquí arrancará el programa TIA Portal y se mostrarán una serie de
pantallas que se describen a continuación.](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-23-320.jpg)

![Unidad 1- Entorno de programación TIA PORTAL
Recuerda • • •
La configuración del
hardware del PLC S7-
1200 se deberá
completar con las
diferentes tarjetas o
módulos que
contenga el PLC físico,
ya sean tarjetas
incorporadas en la
propia CPU (signa/
boards) o módulos
añadidos en ambos
laterales de la misma,
para la ampliación de
entradas y salidas, así
como para la
amplición la
funcionalidad en
comunicaciones.
18
A continuación, debemos configurar la CPU con la que vamos a trabajar y para
ello pulsamos sobre Configurar un dispositivo. En ese momento TIA Portal
presenta la siguiente pantalla en la que figuran los diferentes dispositivos
disponibles:
• 9�n-uoo
. .,,""
• ·CPV 1l11C...ot>Cltr
• . CJ'U l:11CDC.oOC:IOC
• -2 CN 1 l1!COCIOC#J'
• ..S Cl'U 1212(AOOtillty
• .;JO'l,1 1�1;C C>CA101i)C
• � Cl'U 1J1 1tOCIDCMr
• .JI Cl'U 1!1o1CiCl1Xitfr
■ilU l14-11t»GXIO
• · CN lll'< DaDCO::
, a au ,21,&,e �
• a CPU tllSCK'°°"'J
• .!l ffl.1 1 2•SC�
l 'JIOV lllSC �
• -!i OU Ul�C OCIOOC>C:
O J CP/ 121,&f(OCIOOtlC
• ..acru 1:1«00DC-,
• ..aou 121,r,c;001KJOC
• :,aou 1:1M<oooc:.wr
• .!1 cru 1:oo "" "Pf<Jk11
Fig.1.36
;:
■
¡:::· -1
tlo,c�
Ml"'O>,.OtlfJbt,O loc.l.b,,u,d,,
ª'""'�,.,,.aon•:6':.«lll ..:.<.,,,o,,,, :,.-oc
SllMOUla.OQ1C,,�lty�l ir�1'•<1<11'6
«"UdO<Urlp401 ,411'GflOt ,._�,JH
�...,,u1. s.,,.
.., 10t..i ,,.,pw i,o .....,,_..,
1w,,.. 1 ...6'f�4• •--··-�..
�ac.,4,,,•»r ,..,u l..,6'f...... H
lt!lllti P,.R ,,..¡>1,,.-IIO; 0.0<l-•IIIOO
"""-tio,,u.c-"'6flfll:IO",nf:T�<t
""""""-� IMt�"""'Ho(,n!'C"'l,C
Seleccionamos Agregar dispositivo, después elegimos el apartado Controladores
y por último seleccionamos el modelo de CPU comprobando su referencia. Es
también muy importante indicar la versión del firmware, que ha de coincidir con
el equipo a utilizar. Al terminar, se deberá pulsar el botón Agregar y se visualizará
el entorno de TIA Portal:
, •
_. e'°1J1,t• d• P"'!I••"'•
, .,a �ios tn,IOlóp:os
• ,.; -n�••JUmu
, :;. .......�, !'1.C
• JJ 1'po1 dadu111fl.C
• .,;1�blu H olnt1WC;,;., ).,,._d
• .1111 1S1diup1 onlóna
• ,.A bu,
• :., o.un ft P'019 6o dupo1illoo
_.,
eo,,�11c>lmdtd"P<l''1N
� Ol,ln yd'
..9"6>11(0
,o lloqun H p,ogr."'•
Ob¡,,1'0S�flOl6to<Ol
-
-
-
M.•
011"-'DQIO_I
·�·
""·'
""·'
IISC_J 1 11 IOOl.1011
HSC...� 1 19 IOIL015
Toutly lt1t•gr�t•d Au!Om,ilticm
PORTAL
► .,a hn•ry-"'1
....
► � OQ
......
....
....,
HSC....5
► 4i �
��=���=E._.....;"-;--;]_,...,.-''�T-,:-�""--
:•,;,.��::��.J:::::::,�'::.., f
1 fntrodHdigMIH
• S11odndi9,..lu
O,,etcK>nnflS
,.. > tntomvd6n
Fig.1.37
A continuación, se pueden añadir todos los módulos de ampliación, si los tuviera,
tanto laterales como integrados en la CPU, por ejemplo, una salida analógica
añadida sobre la propia CPU. En la carpeta Signal Boards localizamos el catálogo
del hardware (AO1x12 BIT) y dentro de este la tarjeta con referencia 6ES7 232-
4HA30-0XB0 que colocamos sobre la CPU.
....:](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-25-320.jpg)
![í
'
'
'
'
'
'
'
1
)
'
)
1
'
'
'
Unidad 1- Entorno de programación TIA PORTAL
• _ )JNll)o>,0_01
• �••Óllpo'l«r'tO
ª°"po)-,�·
. -
, PL(_l (CJIIS 1l141C�
l'f �aon•-,o,
l o,,1,.,. , ,,.9��,i.:o
• ·
:a- llc!Qw• · """"""
• • Oo,rm'""°""9ic"O"J
, • "'•rir,u tlW..,.,
• 41 V.nebln !.C
t .. >lpo, okd•wt"-C
• •-bla•...H..•tié.,J""3d
• .. ..cl,,,p, �
ro' 'Al•• •�• L¡ Vlfti ""' ,,,,_
.i_]Ol' Vlf� di d�potlthoot
�-________]_=' .,.. 2' � :;l;f • ::'- j V11t..Wt"lfr.il6' olspcwltt- 1
't./ Moclwic �< °""'ac,nl O,,e<:tióto Q
� -
· =•
Ol l4'CIQ IO_J
M ?_I
"'IJ IJfltlT_l
,.__,
..,
HS(._2 f • • 10IM...TII07
---------.-.·--------=::-----;-�.:--;�.:;________
"''-'
""-'
_,_
, CN
• ..tl �'f"91 -tdf
'.�
' .,.,
,.,OIIOQ �j
, __..., ;
· �
;
IIIQ ll<t211T
l
---- [1 ¡��, !�:�i--uoq,:ao i }
t ; a lll�A>ff «>P'_*{_ "'
1 -..
t 1, 0.10, ff ,...,.. . ,i,,.......
t 31 h,..ryS-ld1 �
l-'---.....:...::::::,..._____.;,;__...._.;r.....__,'--...:.l--,==....;;,==----=-=--'::1 :!� :
_.,,.
C�••t,o,,dad'l a ·
j,1 0---1�9,..._
o �• " �"
°"'1o• w.:�01
.,...,..._,
• V.neblit1 PI.C
t Sti.d» ....�.
""-':c-• f'S
"''""'"""'"'
Fig. 1.38
1.2.2 Configuración de las propiedades
, _.....,
.....
, .,.,
··-.IIO
, :. liblllvJ W c-lllliuCIO'I
• ..!1 M6cl..,. "'°"""91<a
¡,
•
¡
Seleccionamos la CPU y con el botón secundario del ratón elegimos Propiedades.
Podemos observar en una ventana inferior las diferentes características
configurables de esta CPU.
, ;.,. 11o,qun � ""9,.....
► • Ollrf!OJIJC"""""'"'
t fl Mmn ,_1
, :.v....111it, ru:
, ,� ..•-.,_e x 1ana,
t - �b¡.u lt OÓ!t..,.� l .,,.,, c....._,__.
• kd.,lpJ ,,.._
,1 • • � �
• � �<ff . ... . .... . rn..
1 .ao.""•'"""""_... O,,.,plK
<T
c.,prn...,.,.iM
C."J••�ftlM,-n.,.o,,11r,e
, ,...w..:.. ........ .....
....,,,...<..,,_.�
S. °"""'r..,_ao
,...
"
a.- ♦ 4', 11:1, •lo::<l,,,..,..,,"�
..,,.....,"""'�.-............_,
IJ{. llfiJt'fl'ICIU "'°...
. ,
]i u� H lla,,..IM,
"""°•---.-
Fig. 1.39
En la que podemos configurar el direccionado de las E/S, tanto digitales como
analógicas, los contadores rápidos, la dirección Ethernet,
Vamos a configurar algunas de ellas:
• Dirección de la Interfaz PROFINET [Xl]. Dentro de la Interfaz PROFINET,
seleccionamos Direcciones Ethernet y vemos que por defecto vienen
asignadas tanto una Dirección IP, la 192.168.0.1 como la Máscara de subred,
255.255.255.0.
19](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-26-320.jpg)


![Unidad 1- Entorno de programación TIA PORTAL
22
Entradas: 1000 a 1001
Fig.1.45
De esta mismaforma realizamos la configuración del resto de parámetros que se
vayan a utilizar en el programa.
Si insertamos un PLC 57 1512C-1PN podemos ver como el árbol de propiedades
es bastante más amplio que en un S7-1214C:
► !nuduNIOANET(Xtl
► N 'S,lo0 2 !X1CI
► Ol 16<00 Us(Xtt l
► OI IUJQ l6 ()C1 21
M•nqw
-
C.n;• dt CCffll.llK.aoón
Uut;a1 d.t 1•s'ttm• t deodo
:sa.M:llKMtmw,Gerd
► OMsrma.od�s�t<e�
Jr.,qos d.cft.C
► StA..Oon•,otb
�•� ONS
► OÍ'lpky
-
-·
► f'lro'WCOOft & 5�.d
> 0,C OA
► A.rtme dt •..,.tflt.600ft del 1�
� ff <�•cion
�o, ..J-t�ltQII
s�o d. ckeGCll:fW1,
► la:;,tN;USl'olltWl'tt
Fig. 1.45a
Si visualizamos el resumen de la tabla de direcciones que contendrá por defecto
la CPU 1512C-1PN, ésta la podemos comparar con la vista anteriormente de la
CPU 1214C.
�Visla tr.,)Qtrigic.a 6Vista d9 "9tle-s [J't Vhb de chpodliw:s
'Vi:sla general de d'iposillvo.s
't, - ..,...., ..,. - -·- Q ....
Q Q
• "-C_l o C"1 Hl .:C•1 ,.,.
Al s.N) l_l o ,. Q_. Q_J lol S!
.M) Z
Ol 1610Q 1'-1 Q 1 • 11L11 .__. Ol 16l>C) t�
Ol 161DQ 16_l o 110 1LH ._, 011-.DQ16
HS<_l Q 116 H� ._,. """
HS(_l Q 111 30. ¡5 -,:o._31 ""'
Pedil �_O HS<_l o "" .._., l�l "'e
H'it:_1- Q 119 .,_,, "---"' KSC
HSC_'S o 1 lO TLH ..._., "ljC
K'iC_6 o 1 .:1 91_101 6"J'9 ""'
1'1h:.t_1 o "' 111L11J ..__., ....
Puk.e_l o 1 U 1H_111 "iLlO] .....
l'uk.t_J o 1 "?4 11L1l:1 104 .11'i -
Puk.e_4 o 1 15 1zz..._1¿,; 11LH1 ....
. -.eñ.t< l'AlFWIH_1 o 1 X1
> 1cm. .
Fig.1.45b](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-29-320.jpg)
!['
'
)
'
'
1
1
'
1
Recuerda • • •
Finalizada la
configuración del
hardware es
recomendable realizar
la acción "Compilar"
que nos informará de si
el resultado de la
misma es correcto; en
caso contrario, nos
muestra el listado con
los posibles errores
detectados.
Unidad 1- Entorno de programación TIA PORTAL
Una vez configurado todo el hardware comprobamos que esta todo correcto y
libre de errores.
Mediante la opción Edición - Compilar o directamente mediante el icono
Compilar, podemos realizar la comprobación de posibles errores en la
configuración.
• · t i
Pro¡,ecto Edición Ver lnse-rtar Online Opciones Herra mientas Venta na A.}'uda
I] Guardar proyecto �J! Ji g: 1rr Establecer conexión online �
•
. 1 •
.!!' Vista topológica
Fig. 1.46
El resultado se puede observar en la pestaña Compilar de la ventana que
aparecerá en la zona inferior:
Compilación lin1h2d1 (errores; o; advertencias: O)
Jwu, Oescnpc,on Ir a ?
O • 1'1.(_1 ;,t
O .... Bloques de progrtme /A
O No sr ha compilado ningún bloque. Todos los bloques están actualt:ado!
O • Con6gufaci6n hardware /A
o
o-
El hard,...are no se ha compilado. Lt configuración u acrual
Compilación finalt:ad, (errores: O. athe1<enc1as•O,
Fig. 1.47
Fallos Ad..,enenciu Hcr1
0 0 1 1 :27;19
1 1 :27:19
O O 1 1 :27:19
? 1 1 :27:19
______1 1 :27:20
Si al compilar aparecen uno o más errores, no se podrá realizar la carga ni del
hardware ni del programa al PLC, en cambio, si aparecen una o más advertencias,
son avisos para informar al programador de alguna cosa que debamos tener en
cuenta, pero dejará enviar hardware y programa al PLC.
1.2.3 Detección automática de la CPU
También es posible detectar automática
de una CPU e importar directamente su
configuración. Para ello tenemos que
tener conectada la CPU online con TIA
Árbol del proyecto [Il ◄
Portal e insertar una nueva CPU al
proyecto desde Árbol del proyecto -
Agregar dispositivo:
Dispositivos
• _J UNIDAD_Ol
_IW';':9rega r dispositivo
!&, Dispos itivos. y redes
Fig. 1.48
Entonces en lugar de elegir una CPU
concreta, podemos seleccionar la
referencia correspondiente a la CPU 1200 sin especificar o "CPU 1500 sin
especificar":
23](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-30-320.jpg)


![Unidad 1- Entorno de programación TIA PORTAL
26
Recuerda • • •
Es aconsejable
elaborar la "Tabla de
símbolos", ya que nos
ayudará a un mejor
entendimiento del
programa durante el
proceso de
comprobación de su
funcionamiento.
Al abrir esta opción, nos encontramos con una tabla totalmente vacía:
UNI 110_01 • PLC_1 [CPU 1214C IIOD0Rly) • Variableo • tanda, 291 - ii1 ii X
_ _ I!J "?' �X
Tabla de variables estándar
Nombre Tipo dedatos Oirecc1ón Remanencia Visibleen HMI Acc�íbledesdeHMI Comentario
<Agregar;,.
Fig.1.54
0 0
En la que, a continuación, introduciremos las siguientes variables:
UNIDAD_01 ► PLC_1 (CPU 1214( AüOORty) ► Vanables PLC ► íabla de v,mables e'>tánda1 (36J - ji ii X
"?' !lx
Tabla de varlabees estándar
Nombre
<11 Sl]ULSJIDOROE PARO
<:I S2_PULSAOOR OE MARCHA
4::1 F2_PFtOlECCION M:>TOR PALETS
-fJl KlM,_�TOR CINTA PALET
Tipo deditos- 01retcíón
"'º' ".10.1
'""' "',,10.2
eool �3.0
Bool '11,Ql.l
Rem•..
- Visibleim HMl Acc.nibled.-sde HM! Comenu,rio
li1l � Puludorde Paro. Contacto NC
.., li1l ¡;;;, Pulsador de Marcha. Contacto NO
li1l li1l Disyuntor m19netoterm1co motor cinta transporte.
� � Motorcint.1 pa!en
Fig.1.55
Una tabla se símbolos se puede copiar en un archivo Excel o desde él, para ello,
tan solo es necesario seleccionar las celdas que deseamos copiar:
UNIDAD_01 ► ptC_1 (CPU 1214( AU0ORJyj ► Vandble5 PLC • Tabla de v.mable?> estam.Jar (36I - jl ii X
Tabla de variables estándar
-r
N
-
om
7
•
b
7
1
r
_
,
'=
,u
éc
, .
ce
AOO
""'
R
"'
D
"'
<"'
P•
"'°"
=��-1-
Ti
c'
,po
�
d•
_
d
_
ot
T
<>s
=ir.c
D
�
irec
�
<
-
ió
r
n
,
Rem1-. Visibli! i!n HMt Acc�ibli! d1!sd1! HMI Com"l!ntario
._ , ..., ,..,,,..v Bool j_l �0.1 • li!I � Puls.edord1! P1ro. Contacto NC
:¡
-O·
S2_PULSAOOR DE MAACHA
F2_PRO'T!COON f.OlOR PALE�
KlM_MOlOR C!NTA PALET
Bool '1.10.2 � � Puludor di! Marche. Contacto NO
Bool '1.13.0 � �
Bool 'J,Ql.l � lit) Motor cinta peli!U
Fig.1.56
A continuación, abrimos un archivo de Excel y con la combinación de teclas Ctrl+C
copiamos en el portapapeles y con Ctrl+V lo pegamos en una hoja de Excel.
Obtenemos la siguiente vista:
8 ., • ; UNIOAO�Ol &ce! O, - t: X
Archivo Jnsert•r IDiseñode pagine j Fórmulas IDatos IRevisar IV1st.1 1PRUEBA DECARG.J EQUTPO I Q lnd""r lmuarses,on R Comp,nhr
Portapapetes r.
84
r
a
1D
11
Cahbri • 1! •
N K i .. A
ª
A..
il · � - .A. ·
Fuente
" ✓
- � General
¡¡¡: :g 'ª l;,I · "' · % ""
!] � � .. ;68 �,
Ahneatión r.; Nume,o r.;
Sl_PULSAOOR OE PARO
e D
Sl PULSADOR DE PARO Sool %10.1
S2_PULSADOR DE MARCHA Boot %10.2
FZ_PROrtCCION MOTOR PALETS 8001 %13.0
klM MOTOR CINTA PAlET Bool 'JIOl,1
� Formato condicional ·
� Darformato comotabla·
� Esttiosde celda ·
Estilos
�Insertar •
� Eliminar •
iJ Formato•
Celdas
G
l: .. �.,..
t;i· p .
�-
"4odJfrcu
H
l;:
12�-�0
=
•.-------------=;::
0:
=-========----;p
cf
,
listo Rtcutnto: 12 gfl 11] � - + 100 %
Fig. 1.57
.'--"](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-33-320.jpg)
![,,
' Recuerda • • •
' Se puede "Exportar" e
) "Importar" una "Tabla
..-..., de símbolos" a un
fichero Excel. De esta
) forma si disponemos
de un fichero Excel con
., todas las variables y sus
..-..., símbolos, podemos
copiar y pegar en
cada programa los
' necesarios, y con ello
nos ahorramos tener
., que crear en cada
..-...,
proyecto todos
los símbolos.
·1
)
'
1
'
'
'
..-...,
'
'
')
í
Unidad 1- Entorno de programación TIA PORTAL
Si guardamos esta hoja de Excel que se puede modificar o ampliar,
posteriormente podemos realizar la operación contraria, como seleccionar en
Excel las celdas que se deseen copiar e ir a la tabla de variables y pegarlas.
Por ejemplo, añadimos tres nuevas variables en la hoja de Excel:
b-j +, • - UNIDAD_0l - &cf'I l1l - 0 X
Ar(hlVO lnserur !Dtseto de p,ág,na ] fo,mu1as I Datos I Revisa, 1V�ta lPRUEBA DECARG.jEQUlPO I Qtnd,l1r Jn,oar set6n ,<:l.Comp.trtrr
ll'..
!l!i ·
·- .,
4
5
6
7
s
10
11
u
últbn =T11 • = = - ii'
N K i · K • aa: se :sa l,el -
� · � • .,j. • � � �
/ ·
� Formato condicional • fflahufflar •
VDar formato como tal»a • !"' Eliminar
� Estilosde cdda • ii! Formato·
Fu,nt, r,, AhnHd6n r,; Número r,, Estilos Ctlclas
e o G
Sl_PULSADOR DE PARO Bool ""J.1
S2_PULSAOOR DE MARCHA Bool "K>.2
F1:_PROlECOON MOTORPAt.E'IB Bool "13.0
klM MOTOR ONTA PAlET 8ool "°-1-1
HO_AMARIU.O 8<>01 %02.1
Hl_VERDE Bool %02-2
H2_AZUL Bool %Q2.3
M3 ROJO 8<>01 %Q2.4
11
�+l
Rteutnto: 12 lj [IJ e:!J -
Fig. 1.58
L .. �T •
¡¡¡ . p .
�-
Mod1f1car
H
+ 100"
Una vez seleccionadas las quese desean copiar, hacemos Ctrl+C y posteriormente
con Ctrl+V las pegamos en la tabla de variables ya creada, con lo que obtenemos
el siguiente resultado:
NIDAO 01 t UNIDAD 01 !CPU 1}14( AU0(JRly) t V,mabl� Pl( ► 1Jbl4 de v,m.ible-. e-.t.and,u l41J - 1! ■ X
Tabl.a d. v.iriable� estJnd.n
Non-bf• 'T"_,o dt dttot Otr«ct6n • _.,..,_.., '1�e,,l-!W N.UI/Of-Ots<ltl-il.l <;i:,ro,-,IMIQ
O SI_PUl.SAOORot: -PNIJ � !il0.1 iii NudOf'd! ,-,ro Con�cti:>HC
O S2J'Ul'SADO,u>U,WIJ� eool 1t,l).,2 lil l'l.ibedord• U.Khfa <onaacHO
Q f2_JA01f:CQONIA)f0UM.!TS 8ool ,..-,..o QJ 01'.s)'l"t� m•qre�ff'IICOl"l'l«or'Cinui O'lnt� d! F,tll!.:S ■
•r-c-=====-�--:...
=
""
c--......,..-,:;
-
;-�,--,-,
.. � 1 :::::��.,,..•
H1_VEll>E 8ool "1,Q2.l ¡;¡j Houl d• HIWUCW)n,.frd!
7 CI H2flUl 8ool "-Q2.J 0 iJ fwcto'Of seA,li:,,aOlu:,.I
e C 1-lJ_AO;o &ool ",,Q2 4 ?I � Piottl dt w'leJcaoon rqo
Fig. 1.59
También existe la posibilidad de poder introducir, tanto en la tabla de variables
como de observación, varios registros contiguos del mapa de memoria del PLC.
Para ello introducimos la primera dirección de la variable, por ejemplo, la MO.O:
NIDA0_01 • UNIDAD_01 [CPU 1}14( A(JO(JRly) • VJu.tble,;, PI.<. • l..i�.t de- v.111.able-,; �,;,tánd.a, 141)
------
- I! ■
"'°""bt-• ropo Ó! dm, OW"'(lQn ... l;r-,..-e11<•• v,sit,te'"...... ;,«e11bi,.ede-so,l'IU Ce.1"".$n�•-..o
o "S1_PUlSM>OROt: '"""° 80Qt 1tia).I 0 iii!t NudOl'df l".tro C,:,c•aoHC
4l 'S-:?J'UlS.•OOtU:lE � 8°"' 1iil0.2 0 ij l'.lud4tdf U.rthe Ccet:.aoHO
<J ,;:_,w:r1t:COONMJlQArN..t� too! "til'J.O 0 Oi,��f"f� "'.o;or'(rlQ tre.,ipott,t d• p.11oe.u ■
<>
<>
o
a
l(ll,I_W10RCINTAPM.ET
..._.........,,
Ht_WJDE
H�_Ac:UI.
H.3_AOJO
�
....
....
....
....
....
....
11,QU li!I Motcf � p,tlf3
'"'" li!I B �.U uil.llL:ilaa- •rr•l'ilo
11,Q:?.J B iil Holod• niw ;,oón w�
MU.J B � df H�il.:»OOl elJ
'-OH B N«o d• añ.,��OÓl'>Nf"
@-.o 8 �
Fig. 1.60
Y a continuación con el ratón seleccionamos la esquina inferior derecha y
arrastramos hacia abajo y hacia la izquierda, hasta tener los registros que
necesitemos. En este caso vamos a añadir siete a partir de la dirección MO.O, con
lo que tendremos:
27](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-34-320.jpg)
![Unidad 1- Entorno de programación TIA PORTAL
Recuerda • • •
La tabla de símbolos
dispone de algunas
funcionalidades de
una hoja Excel, como
por ejemplo poder
declarar de forma
consecutiva y con
direccionamiento
automático variables
consecutivas.
Recuerda • • •
Los PLCs S7-1 200 tan
solo admite los
siguientes lenguajes de
programación:
• Diagrama de
contactos o KOP.
• Diagrama de
funciones o FUP.
• Lenguaje
estructurado o SCL.
28
H◄IIJA'J 1¡1 • JNl!J,.IJ fJ1 {1f�J 111-'! f-'JIJfJ!'l:,I • /,, ,1,1.... 11 1 ► 1-,t,l.i ,J,, vJn,t,J,,, ,. ¡, ,.JJ• l41J - l! ■ X
No,,ibo, 1Ípod1td.usi ou,nion .. �,ntnc1- 'lsoblun HMI 1i«.CS1ble�MUI to1r.111t.1r,o
G S1,JUI..SAOC:)A.ot: ,AAO tool U:, I � fiiiil r'ui51dordt P-1ro. eortt,uo NC
G S1J"V(,S:IOOlt Dt MAIICMA 8ool .-..0.Z � l'Uludo, ff t.4trth1 Co,lfllctoNO
G F'Z.}'lk)'JtCOOHM0'10111"1Ul5 8ool "''.O � � t)l,,UrMf'll'll¡Jnt-JO�fm1Co, 1norord1tui tfl1uporit ckptleu.
-0 1'11,(.,MO'l'OllClf((.V,UT llool IQ1.1 � e MolOfúnt.1 ptlcU
J -Q Mtl_N.WIIU.O llool "-0:Z.1 � � rriof0dur�bd6n11T11rillcr
G MU'U!Ot tlool w,.z � 0 l'ffoto de nlltll:,a6nwn:le
-: G HZ_AZVl- loo! 'M):Z..., � � PIioto de ull,1iaó6n UJI
G H!I.JIO}C) 9ool � 0 Notod.- ul!.li:sid6nre,o
.., -- .... 8
...... ,, 0 0
Fig.1.61
Y al finalizar el arrastre se observa cómo automáticamente se han creado dichas
variables hasta la M0.7:
J►lllJ.-,U ;1 • l¡l!IU.-, J J1 '!"! 1,14, l•JJ!J</1'/; • .¡,¡ ,ti<- 11 < • f.,r,¡., ,J, ,�1 ,1,1, , t.1<�1.,
T•bf., dtl writbl4f estinNr
� tipo.et...,_ Vit«dó,, ... �tf �'"HUI .Jicc..U.dffdfl-M �Wrio
.CJ S1J'Ul..SAOO!lot''AIIO SOClt 'l,I0,1 � 8 f1Vl.1Wff r,ro.to1:t1e,to HC
4JI SZ..J'lU�Dt.t.WIOIA 8ooi 'i.lO.Z � � ,uludoo'd1MlrtN C:C,ntfcictHO
G f;!:.J'll(rltt'.OOH �lOIJ,AUJS fool "'J.O 8 � Dos)lt,lftlorm19�•mÍCO.,,ott,,CÍnMi tr11nJpo,r. lkp1lt11-
,0 ��OM'IAP-,tU.l' 8ooi ,01,1 9 ,.._,c:lllu .,_h,11,
<a HO.JrMl,IIU.O SOo( 'ltOZ.1 � NIMH ••lillli:1tJ6n11Nrilo
.C M1}41Vt IJoof "'OU � P'iloro-ck 1tll1¡llllci6nwrdf
<I Ht..!,t"- � �u il P'iloeo6nrAd:11"6n,i:ui
!! 4J HJ.)IOJO &Clol tiii J"llo(c,dt Hll.liaid{wHojo
.., � ""' B
CJ �t 80CII �
,Q """"-""" .... �
-o � ""' B
,o �· 9-ool (i1I
4 ,O �IMLJ !ool �
G � ""' !'I
CJ �
J ltool
Fig. 1.62
1.2.5 Creación del programa
Desde TIA Portal, y dependiendo de la CPU elegida en el hardware, podemos
utilizar los diferentes lenguajes de programación que contempla la norma IEC
1131-3 y que son:
• lista de instrucciones o AWL.
• diagrama de contactos o KOP.
• diagrama de funciones o FUP.
• grafcet o GRAPH.
• lenguaje estructurado o 5CL.
Es posible utilizar los lenguajes anteriores en los modelos 57-300/400 y 57-1500,
pero no para los 57-1200, que tan solo admite los lenguajes siguientes:
• diagrama de contactos o KOP,
• diagrama de funciones o FUP.
• lenguaje estructurado o 5CL.
Para crear el programa en el bloque OB1 debemos elegir la opción Main [0B1]
que encontramos dentro de la ventana Árbol del proyecto, dentro de la carpeta
PLC_l - Bloques de programa:
Al hacer un doble clic sobre esa opción Main [0B1], aparece el editor de programa
en KOP, que está formada por las siguientes zonas:
.__,](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-35-320.jpg)




![Unidad 1- Entorno de programación TIA PORTAL
•
■
JI
III]
,o/ode� de ,ttl!'lotor,igur,d� df' 'P.t....l"
Olip05,!UIO Tipo ded1J.P01,1twO Slot Típo
l'.C l CN 1214CACJOCJ1:ty ! X1 F'NllE
Di,pc�•tivos tol'T'p,11nblu en i. subred de d,nmo
lfupos.11/'0 Tipo� dispos,u.,o Tipo
Fig.1.78
Tipo de d�ollti�o Slot Tipo
C,V 15121:.-1 PN l Xl P!';,'IE
O•r�ción
192.168..0.1
llpodt intT�zl"G/PC.: ._
,..
_
«_
=•
..
M
._
.- -------
Fig.1.78a
A continuación, se ha de completar los siguientes campos:
Tipode interface PG/PC: el tipo de protocolo a usarsegún el PLC utilizadopuedeser:
PN/IE
PROFIBUS
MPI
Teleservice
Interface PG/PC: indicamos por qué tipo de conexión del ordenador tenemos
conectado el PLC. Podemos encontrar las siguientes:
tarjeta de red de área local (LAN)
tarjeta de red inalámbrica (Wireless)
PC Adapter
simulador PLCSim
33](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-40-320.jpg)




![Unidad 1- Entorno de programación TIA PORTAL
38
Marcamos la casilla Sobreescribir todos, a continuación pulsamos el botón Cargar
y aparece la siguiente ventana:
sultados de la operación de carga
hado l Clfl.1ln0
'-
J, � • f'l.C_1
► Aaunnr me;du!0,s.
Mmi1.1e
Ope-rtción de nrg• 'Tn•li::ada correrumf'ntr
AIHnurwdos.
Anwnnrm6dulos. tras. urg1<r
l.....,1______cc.....
• _______.!11
Cancel11
Fig.1.91
Tras marcar la opción Arrancar todos, debemos accionar el botón Finalizar para
acabar con el proceso de carga del programa en el simulador.
• Simulador para los modelos S7-1200/S7-1500.
Una vez realizadas las operaciones de comunicación y carga del programa al
simulador S7-PLCSIM, este pasará a tener la siguiente vista, donde se observa la
asignación de la dirección IP del equipo:
�¡; Siemens
FLC_1 [CPU 1214C �CDC'l:;l �
fS!E!'!.I_E�S'.
(1) RUN
■ �UN/STOP
STOP
■ 6!ROR
■ MAINT MRES
Xl 192.168.0.1
-r.Nmgún proyec.10-..
Fig.1.92a
�� Siemens
r:i!E"!E�S'.
('.) RUN
■ �UN/STOP
STOP
ERROR
• !,Wtff MRES
Xl 192.168.0.1
X2 192.168.1 .1
�Ningún ptcryecto>
Fig.1.92b
A continuación, si desplegamos el simulador mediante el icono Cambiar a la vista
del proyecto que aparece en la esquina superior derecha, este se mostrará de la
siguiente forma:
Totally lntegrated Automation
• !! !]! ") ! (" , ' S7-PLCSIM V14
Fig.1.92c](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-45-320.jpg)



![Unidad 1- Entorno de programación TIA PORTAL
42
Recuerda • • •
Desde el propio PLCSim
podemos construir una
tabla en la que
configurar la
secuencia de
activación y
desactivación de los
componentes para
hacer que el
funcionamiento del
programa pueda ser
automático.
De esta forma, al ir introduciendo etapas, de forma automática cada nueva etapa
se situará con un retardo de Ss respecto a la anterior.
Se deberá completar las siguientes columnas y ajustar la acción a realizar en la
columna Parámetro de acción de la variable introducida, bien en la columna
Nombre o en la columna Dirección.
-
• :.J ut«IA0.01,.SIM Ci
• 4 1'1.C_1 !(JIUl21�AC.ll)(Jlt",I =a
• r,blu SIM
rll' "9�!ll•t -YI Ubll SIM
.:,.¡ 1-1>!. SIM_.I
.. r-
_. s«�nciu
rll' Agrf-gU l'IUf'llt HCWr>CÍI
1 StClltlKlt_l
'51_"-'lSAOOIIDf ,ANJ"-;t eool
10.00 'F1.1'1101tCOOtlMOiO/U'lilt$':f' 'lol) O,, tool
1S.00 'Sl.)'UlSAOORDf�";P' ...O..U lool
::0.00 ·s2_1'UUAOORotl>WCHA":f' 11¡,¡0.J:J' lool
2o.00 ºSt_f'VLSAOORDf ,.>II/Y1' 'IWO 1:1' lool
1S,OO "Sl.l'VU."OOaOE ,Nt0':1' ...:>.11' lool
30.00 "Sl.]'ULSAOOIIOE ..wotK:t Ml.21' loo!
3S.00 'S2.fUUM)()ftDf l.WIQIK;P' ,,,o �
40,00 ''2J'Jt:)tECCIONM010ll,,UlSº1' 'IWUl1'
0.00 "f2J'1101tCOOH MO'lt:i.,lill5":I' 'I.D.O:,
--tf sam
,'rfllu.u , vtlot
....,,u,, ,,.1o,
"'fll<tllrt vtlot
"'iu•u1 1 nlor
....¡.,,1ur, v11ot
A¡uu.1,1 valor
Aju1t1111vtlor
""""'''"'lor
...,.,UU I Vtlor
.-,U11.u, ...1or
Jle�llflHufl'l(.W
Tcit.tUy lnteg1oued Automatlon
S7-PLCSrM V14
-
""
'"''
fAI.SE
' "
� PlC,..)
"'1 ✓ " . .. ' . 1
Fig.1.99
Al pulsar el icono Repetir secuencia, se puede configurar como:
• Parar secuencia. al final de la secuencia programada se detiene su
funcionamiento.
• Repetir secuencia. al final de la secuencia programada se vuelve a repetir la
secuencia desde el principio.
Una vez completada la secuencia podemos visualizar tanto la Secuencia_l como
la Tabla SIM_l para examinar cómo van evolucionando el estado de las variables
en cada momento. Para ello, tan solo necesitamos accionar el icono Iniciar
secuencia e ir observando en el tiempo cómo va cambiando el estado de las
variables de forma automática:
• • 11
O.rtaión ¡ton)'l1:odtvm.tlíuci6n Obsffi..,fiom,rvllot
-0 ºS.l_l'UlSAOOADf ,Nll:J";/' 'IW0.1:f' eoot "!AIJf
-G ·s2.P'UI.SAOOAOE t.WOIA":f' !j ...0.2:, 8ool E] FALSf
-a ·n1-=in:cOON WtoA l'1'ril.!1'S";I' 'Wl.O:P Bool
-o "l(IM.IA'.llOAOtnA,mr 1,Ql.1 !<lcl
'41 "HO�U.0' Ml2-1 �el
'"' J¡ SfCUfl"Óel
fl "9rtg1rnut-vt stc�r,c;.
-0 "HI_VfROe"
-0 "H2flUL•
"Hlft)JO•
'W2.l eool
'll,Q2.3 Ice!
'11,QH
p) (> §-' {; � •I • U@ lnlfMlcp,..d"t.- c::I� ..!.) i •�dcs ➔ .._. .t
Tiempo °'1tctoón
1-+ '"'
SJio" •s1JUl5,'.l)OAOE f>KJ':P --¡¡"""°
M)_J·f
10,00 "Fl_!'ROiECOON tA:l"lOR PAl.f"l5-";1' 'WM;I'
U,00 '!.2Jl,llSIOOII.Df MI-IICHA"1' -..,0.2:t
20.00 'Sl_l'ULSAOOR Df ""'-IIIC>IA':t 'M0.21'
20,00 'St.MSH>OR OE ,AAO"f'
➔ n,oo 'st_l"VlSM>OAOf ,AAIIJ" ,
'Si_PULSADOADf ,,W>;QV,':f'
40,00 "fl_l'ROtECOONhCllOR,Al.�15':f'
is.DO 'f2J'AOlECOONMOlO� fAL.fl!iº
':f
.,,uC:f'
'1,13.Df
�f!IIO<O dt �ISUl'liuóón -A.<C!Ófl
!lu(:.., il'l"'�,!,1ttM'!l'l!t
�.,!Afust•t 1 wlor
l!cct ;,¡,,,1.1,1 ,elor
11!;,,ol ��su,1 -..10,
Oool
"'"'
'""'
11ju11.1,1 ·,1lor
�u,tar•v•lcr
"'u1:.,1 v1lor
1,¡....., . �-lo,
.-lf<n,.r• v•lor
A¡un1,1-nlor
AiUSUrt ,,_lor
Fig.1.
100
""'
'"''
'"''
'"''
•.,.
,.,.
'"''
..,,
TOUll!y lotegr.lled Automation
S7-PLCSIM Vl4
11e..,pcdtt¡tc
kmartCMl"ffitffllffile ,;
Q ,ALst E]
Ü FM..Sf 0
� FALSE 0
Q fALSf 0
[3 ,AUf f)
Q FALSE 8
Q fAL.SE 0
Q FAL.sE 0
Una flecha de color verde nos mostrará el paso de la secuencia que se está
ejecutando en cada momento. Igualmente podemos visualizar el funcionamiento](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-49-320.jpg)

























![Unidad 2 - Introducción a la programación
Recuerda • • •
Con comunicación
entre el ordenador y el
PLC, desde TIA Portal
se puede disponer de
la información sobre el
estado de ocupación
de las diferentes áreas
de memoria.
68
Plano de ocupación
Carga de la memoria
Dentro de la última pestaña Carga de la memoria podemos ver los diferentes
datos de ocupación de las diferentes memorias:
Memoria de carga
Memoria de trabajo
Memoria remanente
.......,... f"0111'"_
-�·-w..q;...
.... 1ou1
) Qlijt-lttf>Cll6flkCll
. ""'-··--·
• t.¡v.,i.W.,,,IU.
'..111pc11.••*"c
• _ti.wu•••-<M7filQN,-,i•-
, a.,twp,.OllliN-
' 'IK�•
' n.11"*"°"".."·""'"
.....,,.,.i...,.........
_iJ�tHdo--
►�til6clublD
..IH
• Jt>ot111•--
• ·(c,,,l,gi..-t<ai...t,,.,._.i,w
► ldiiDfr
..lJIN""-lll
•• ,,uuo,, .....
1 ,lf�NW ...la,¡.,Ml..,.._USfl
�-� -·�.....,.___
º" º' o-.
768CClbylH l!Z4Gby.,n �dll; l•
t?O"'f+I O!!J!!!.. U]!e:� OUoptikll!ll l
Fig. 2.9
"
..
Para ver el uso de memoria de la CPU online, en primer lugar hemos de Establecer
conexión online con el PLC y posteriormente hacer un doble clic en las opciones
Online y Diagnóstico que encontraremos al desplegar el proyecto de la CPU. A
continuación, debemos expandir Diagnóstico y seleccionar Memoria:
Accuo5 online-
• Oi19n6nico
Enadodedi19nóuico
Búferde di119n6itico
1íe-mpode- ciclo
Nt-mori1
► lnttrfazPROflNETIX1}
► funcionu
• Memoria remanente
T1m1flo, rfl �
Liblt:
Ocupada:
Tottl:
...
Mtmoria-deurga.
◄188468
5836
◄19-4304
Mffnoria dto u11bajo t.,1emori1 rtmen_
Fig. 2.10
102324 10240
76 O
102400 10240
Es posible evitar la pérdida de datos tras un corte de alimentación marcando
determinados datos como remanentes. LA CPU 57-1200 permite configurar como
remanente tan solo el área de marcas, a partir de la MB0, mientras que en el 57-1500
permite además del área de marcas, seleccionar como remanentes áreas de
temporizadores y de contadores. Cuando tenemos declaradas las variables del
V](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-75-320.jpg)
![)
)
)
'
)
Unidad 2 - Introducción a la programación
programa, nos aparece una columna con el nombre Remanencia. Si esta se encuentra
marcada, nos indica que esa marca es remanente.
UNIDAD 02 V14 ► Ul_HORIA {CPU 1114-C AOOCJRly} ► V.m.1bles Pt.C ► T.lbli'i de v.1nabl�s_1 [<>J - lit ii X
1
-------,..._---------�-��-------�<JVariables G) Constantes de usuario
�ir ª i!/t
labla de va,la les_1
N.ombre Dir&:ci6n �.11nmcill /Ct.t-sible de«le HM!:Of'C UA E¡cnblble desde HMliOPC UA Vi�1bl� ffi HMf En inff-._
... """-º Bool ......o ¡;¡¡ Q liiiil
... """-' Bool ""'°·' Q (;¡i)
... Aux..2 Bool .,..,., Q (;¡i)
... SO_E�RGENQA Bool 'lWO.O ¡;¡J (;¡i) ¡;¡¡
... S1_PAAO Bool %10.t Q �
... S2_tNJKHA Bool "M0,2 !i1l
... S3_SELEClORAUTOft..Wl Bool "'º.3 ¡;¡¡
... i'.uit...30 Bool "'"'º r Q (;¡i)
... ........ Bool ....... r;¡ !i1l liiiil
< "
Fig. 2.11
Para poder determinar que un área de marcas sea remanente pulsaremos sobre el
icono Remanencia. En ese momento aparecerá una ventana en la que podemos
configurar el área remanente de la CPU, tal como hemos visto en la figura anterior.
Por defecto, no hay ningún área de marcas configurada como tal, y esto se debe a
que en la ventana de configuración Memoria remanente hay un O en el campo N.º
de bytes remanentes. Si introducimos un valor, por ejemplo 4, quedará configurada
un área remanente formada por los bytes MBO, MBl, MB2 y MB3, es decir, 4 bytes
empezando siempre por el byte O, a continuación se muestra la misma
configuración para un 57-1500 y para un 57-1200, respectivamente:
MenlOria remaneñte
-
X
N.1- de bytes remenentes, empeuindo por tveO: O
::::::::::
N.t de temporizedo�s SllvlllC remane-mes, empezando por TO: "'º----'
N.r.. de conudores s1,w;,.nc re,monentes, empezendo por CO: ._o____.
1-Mmorie remanente actuelmente disponible (b)'tes): 90766
Aceptar Cenc�lar
Fig. 2.12a
Memoria remanente 'X
N.11
de bytes remanentes, empez.endo por 1'.430: ---
N•.:i de temporizadores Slr-Nl."ílC: remanemes, empeundo por 10: �]
N.� de conudores Sl�.'.ilC remanente�. empezando por CO· �
Mt!-moria remanente actualmente disponible (bytH): [i"§n6 7
Aceptar Cencelar
Fig. 2.12b
Al configurar el área de remanencia, se configura el ancho que se precisa,
iniciándose siempre por el O, MBO para el área de marcas. Como el 57-1200 no
trabaja con áreas de temporizadores ni de contadores, la modificación de sus
respectivos campos se encuentra inhabilitada, hecho que no sucede en el 57-1500.
Observamos cómo ahora sí se pueden ver en la columna Remanencia de la Tabla
de variables los bytes configurados con remanencia.
Tabla de variables estándar
Nomb"° lípodt-deto,
... PUl.SAOOR DE f'AAO ...,
f'ULSAOOROEf.MRCHA ....
... Rt-manent• ...,
8AiAAVlN10SA ...,
... NoP.emant-nt• Bool
O.rttti6n Ri!ffilrtt!fl(II
"'°·'
'"°.2
.....,_o
"°°·º
......o
AccMiblt- d�• HM!•OPC U.I
Fig. 2.13
Escribiblt-dM.dt- HMl.lOPC UA V1i1blt- ton HMI EnginHtmg
(;¡i)
¡;;;¡
Ga
�
Vamos a comprobar con el siguiente ejemplo cómo trabajar con marcas
remanentes o sin ellas:
69](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-76-320.jpg)


![Unidad 2 - Introducción a la programación
Recuerda • • •
Las instrucciones de SET
y RESET fuerzan el
estado del bit
asociado al valor «1 >l o
«0n respectivamente.
72
1 iNOl]
) -{ )
ffi] -{/)-
) -{R)
ffij -{S)
) SET_BF
) RESET_BF
g¡j SR
g¡j RS
1 iPf-
1 iNl
g¡j -{P)
g¡j -{N)
g¡j P_TRJG
g¡j N_TRJG
g¡j R_TRIG
' F TRIG
Contacto normalmente a bierto (Mayús+F2)
Contacto norma lmente cerrado [Ma�s•F3]
Invertir RLO
Asignación {rv1ayús�F7)
Negar asignación
Desactivar salida
Activar sa lida
Activar mapa de bits
Desactiva r mapa de bits
Flipflop de a ctiva ción/desa ctiva ción
Flipflop de desa ctivación/activación
Consultar flanco de señal ascendente de un opera ndo
Consultar flanco de señal descendente de un opera nd
Activa r operando con flanco de señal as.cendente
Activar opera ndo con flanco de señal descendente
Consulta r flanco de señal a scendente del RLO
Consultar flanco de señal descendente del RLO
Detecta r flanco de señal ascendente
Detectar flanco de seña l descendente
Fig. 2.16b
Ejemplo: queremos desactivar el funcionamiento de la cinta que transporta el
palet (Ql.1) cuando se dispare el disyuntor magnetotérmico (13.0) o el pulsador
de paro (10.1):
'113.0
"PROTECCION
MOTOR 2"
'IQl .1
"MOTOR CINTA
PALEi
1---Vl--""T""--------------------{ R }---<
,io_1
"PULSADOR DE
PARO"
• Activar salida S:
Fig. 2.17
La instrucción Activar salida permite poner a 1 el estado lógico de un operando
indicado.
La instrucción se ejecuta solo si el resultado lógico (RLO) de la entrada de la
bobina es 1. Si fluye corriente hacia la bobina (RLO = 1), el operando indicado se
pone a 1. Si el RLO de la entrada de la bobina es O (no hay flujo de señales en la
bobina), el estado lógico del operando indicado no cambia.
Ejemplo: queremos activar el funcionamiento de la cinta que transporta el palet
(Ql.1) cuando accionamos el pulsador de marcha (10.2) o el pulsador ACK (13.1):
,io_2
"PULSADOR DE
MA.RCHA"
'IQl .1
"MOTOR CINTA
PALEi
�
7
-"""T"------------------i(�}---<
"PULS:�
• Flip-flop de activación/desactivación R:
Fig. 2.18
La instrucción Flip-flop de activación/desactivación sirve para activar o desactivar
el bit de un operando indicado en función del estado lógico de las entradas S y Rl.
V
' /](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-79-320.jpg)



![Unidad 2 - Introducción a la programación
1 Símbolo
[]
1
□
1
t
--
� 1
Recuerda • • •
Un Grafcet está
formado por una
etapa inicial y
diferentes etapas
intermedias. La etapa
indica un estado
estable del proceso.
76
1
1 Nombre
1 Descripción
Indica el comienzo de la secuencia GRAFCET y se activa al
poner en modo RUN el autómata. En general tan solo
Etapa inicial existe una sola etapa de este tipo en cada cadena
secuencial, pero puede haber sistemas en los que haya
más de una.
1
Etapa Su activación lleva consigo una acción o una espera.
Las uniones se utilizan para unir entre sí varias etapas.
Unión
Si la unión se realiza saltando algunas etapas, ya sea en
el sentido de evolución del Grafcet o en su sentido
contrario, se indicará con una flecha en su punto final.
Condición para desactivarse la etapa en curso y activarse
Transición la siguiente etapa.
Se indica con un trazo perpendicular a una unión.
Indica la activación de una u otra etapa en función de la
Direccionamiento condición o condiciones que se cumpla(n). Conocido
como divergencia o convergencia en «O».
Muestra la activación o desactivación de varias etapas a
Proceso simultáneo la vez. Utilizado para una divergencia o convergencia en
«Y».
Acciones asociadas
Acciones que se realizan al activarse la etapa a la que
pertenecen.
• Etapa
Las etapas del Grafcet representan los estados estables del sistema y se indican
con un cuadrado numerado. Podemos encontrar dos tipos de etapas:
Etapa inicial: será la etapa por la que se inicia el funcionamiento de la
secuencia y se representa con un doble cuadro.
Etapa intermedia: son el resto de etapas que no son la inicial. Se representa
con un cuadro simple.
Etapa inicial Etapa intermedia
_J](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-83-320.jpg)



















![Unidad 3 - Programación con temporizadores IEC
Al igual que el temporizador TON, a este TOF también se le debe asignar un
bloque de datos DB en el que se guardan los datos de la instrucción. La
declaración de este tipo de temporizador se realiza igual que se hizo con el
temporizador TON.
En este caso modificamos el nombre, escribiendo DB_TOF_01, y de forma manual
le asignamos el 0B2 como DB asociado a este temporizador:
Opciones de llamada
B
lrlsuncia
indrhdual
_..._
Nomb" ,-
OB
-
_10
_
F_
01
------,-,
Númt-ro
..,,.__.,......:
@ Mtnual
Q Automatico
El bloqut' de función ll11mado guarrla sus datos en un bloqut'
dr datos dt' insumía propio..
mó,
Fig. 3.14
Al crear el bloque de datos, y de igual forma que
ocurría en el temporizador tipo TON, lo podemos
encontrar en la carpeta Bloques de programa >
Bloques de sistema > Recursos de programa del
árbol del proyecto.
Arbol del proyecto IT ◄
Ejemplo:
Dispositivos
" o C)
• ..J UN!DAD_03
WAg�gar dispositivo
.L Oispositivos y rt'dt'S
• '}a Pl.C_l (CPU 1214C AC/DC,/Rlyl
Configuración de dispositivos
� On!int' y di19nón1co
• � Bloques de progr1m1
W Agregar nuevo bloque
::11- Mein JOBl]
• siartup ¡oe1 00¡
.. l _Tempori:::iidor_lON jFC1J
• 2_Temporiiador_10F jFCl]
• ;zr, Bloqu!'s dt' sistema
• � �cur5os de programe
f
---��
OB_TOF_Ol fD�
.. 0B_lON_01 IOBlJ
► Objt'tos tecnológicos
Fig. 3.15
Al accionar cualquiera de los dos pulsadores conectados a las entradas de marcha
(10.2) y ACK (13.1), se pondrá en funcionamiento el piloto verde (Q2.2), que dejará
de funcionar una vez transcurridos 10 segundos después de que ninguno de los
dos pulsadores esté accionado.
Si en cualquier momento volvemos a accionar cualquiera de los dos pulsadores, el
tiempo se reiniciará.
Al finalizar el tiempo, aparte de desconectarse el piloto verde, el tiempo actual se
mantendrá en los 10 segundos hasta una nueva activación de los pulsadores.
En todo momento se deberá visualizar en el registro MD100 el último valor de
temporización.
97](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-103-320.jpg)


![Unidad 3 - Programación con temporizadores IEC
100
Al crear el bloque de datos, lo podemos encontrar en la carpeta Bloques de
programa > Bloques de sistema > Recursos de programa del árbol del proyecto.
Ejemplo:
• t.J UNIDAD_03
lf"1rig�q.udi-.pmitivo
iti or.po..ruvo-. y �dl!!-.
• [m PL<:_1 (CPUUHC.ACIOC/Rly!
ltt Configurdci6n de dkpo-.itivo-.
jJ Onlinl!! ydi.lgnó"tico
• 'i:,. Bloquie1o die programa
lf Ag�qar nuevo bloque
.. M,in {OB1 )
a- s�rtup (OB100]
.. ,_T,empori.Mdor_IDN (FC1 J
• 2_Temporir.idor_:roF (FC2]
.. 3_Ti!!mporiz.,dor.JP (FC3)
• $l Bloque-. de siuema
• � Recun;os de progntmd
ii OB_lOF_01 (082)
0B_IDN_01 (D81 )
......-.... = ·�•-11'_01 (083J...-...
► Objeto-. tecnológicos
Fig. 3.21
•
Mediante un sistema de pulsadores conectados a las entradas de marcha (10.2) y
ACK (13.1), debemos conectar el piloto verde (Q2.2) durante un tiempo de 10
segundos justo después de haber pulsado cualquiera de los pulsadores.
Si en cualquier momento volvemos a accionar alguno de los dos pulsadores, el
tiempo no se reiniciará.
Al finalizar el tiempo, aparte de desconectarse el piloto verde, el tiempo actual se
reseteará y se colocará a O segundos hasta una nueva activación de los
pulsadores.
En todo momento se deberá visualizar en el registro MDlOO el último valor de
temporización.
'XD83
ºDB_ll'_01
º
'Y.I0.2 1P
ºS 2_M'IRCHA
º Tíme
'Y,Q2.2
ºH1_VERDE
º
IN Q -----------! }---<
T#l Os - PT 'Y.MD100
'-13.1
·ss_pULSADOR
ACK"
r�:
OE" MCM
B_ll'
,_
_
_
01
-
º
.
-
ET
-
-
- �: -
�� OLJTI
ET- ºlí• mpo_Actua r
'Y.MD1 00
ºlíempo_Actua r
Fig. 3.22a
Fig. 3.22b
También podemos utilizar los parámetros del temporizador, tanto de entrada
como de salida, en diferentes segmentos del programa:
V
V
V
V
J](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-106-320.jpg)







![Unidad 3 - Programación con temporizadores IEC
Recuerda • • •
Cuando se programa
un temporizador en un
bloque OB o FC, se
debe asignar un DB de
instancia para cada
uno de ellos.
108
3.5.1 Temporizador programado en un bloque de organización (OB}
o en una función (FC}
Al insertar un temporizador IEC en el editor de diagrama de contactos, se solicita
que este se asocie a un bloque de datos DB. En este caso el D810:
'IIK)_J
'S3_SELECTOR
AUlO/MAN"
'IDBl
'DB_lON_01'
10N
Tome
'11)2.4
ºH3_ROJOº
t---- 1N 0 ---------------i )---<
T#10s PT 'YMD100
Et- ºlíempo_Actuo I'
Este bloque de datos DB tansolo podrá ser de instancia individual:
1na•ncie
tndi-,idual
_.._
Nombre r.
.,.
:-e
_,o
::e:
._
,-:
0,:-
1 -----,,,,
Nijmero
@ Au.om4tico
El bloque de función llamodo guarda �u1 dato, en un bloque
de datc, de ifüunci-, ptop10.
m!,
Fig. 3.37
Fig. 3.36
Al abrir el DB de instancia se observa la declaración automática de los parámetros
que ese temporizador dispone, y que es la siguiente:
Nombre
LJ
-G • ST Time ti) ::.oms
B 0 0
-e . PT lime ::oms 0 0 o
, -e . ET Time !rOms o 0 0
-G • RU Bool lal<• 0
o -G • IN Bool lal<e El 0 0 o
- �- Q Bool false o 0 0 �
Fig. 3.38
Si antes de abrir el bloque de datos de
instancia, que se ha guardado en
nuestro proyecto dentro de la carpeta
Bloques de programa - Bloques de
sistema - Recursos de programa, lo
seleccionamos y elegimos la opción del
menú Edición - Propiedades, se abrirá
una ventana de propiedades de este
bloque, en la que dentro de la opción
Atributos deseleccionaremos el
atributo Acceso optimizado al bloque
y obtendremos la siguiente vista:
,.. Qii 01_Temporizadores (CPU 1 214C ACJDC./Rly)
1 Configura ción de dis,pos,itivos,
� Online y diagnóstico
,.. !i,: Bloques de progra ma
IrAgrega r nuevo bloque
:a- Ma in (OB1 ]
:a- Stan:up (081 00]
,.. li, Bloques de sistema
,.. P::-: Recurs,os de progra ma
····························•· DB_10N_01_ (DB1 l ........................
► [¡¡ O bjetos tecnológicos
Fig. 3.39
J
'-...,,'](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-114-320.jpg)
![�
�
'
'
,.....,,_
'
'
'
'
'
'
'
l
-
'
'
'
' Recuerda • • •
, Cuando se programa
un temporizador en un
bloque 0B o FC, se
, puede acceder a los
registros del DB
' mediante su dirección
,, absoluta o simbólica.
'
'
'
'
'
'
'
'
'
'
l
'
Recuerda • • •
Cuando se programa
un temporizador en un
bloque FB, se puede
elegir un DB multi-
instancia, que permite
incorporar varios
temporizadores en el
mismo DB.
Unidad 3 - Programación con temporizadores IEC
Fig. 3.40
Ahora, si volvemos a abrir ese mismo bloque de datos, se observa cómo aparece
una nueva columna llamada Offset en la que se muestran las direcciones
absolutas de cada parámetro dentro del DB:
06_TON_01
Nombre Tipo di,dno1, C)'if)et 1t1lor d'l!'•rmiqu.c �•nen(� Actni
'bledt:,de HM!iQPC UA E.5tnll'ib!e dt'W'I!' HMj;OPC UA 'TJl
"ble rn HMI Engll'lttfln9 Vtlor de 1¡vstto
-O .. �atic
-O�Tirne 4.0 .,.,,,., o 0 0 0
<J . ET lirN! 8.0 ,.�Orns o 0 0
,
<J . IN Bool 1Z.l ,,. o 0 0
<J . Q eool ,,, ft>li.- El 0 0
Fig. 3.41
En este DB de instancia podemos hacer uso de los parámetros de forma individual
en cualquier lugar del programa, ya sea en ese mismo bloque o en otro bloque de
programas diferente, y para ello podemos utilizar tanto las direcciones simbólicas
como las absolutas:
1 ::
e
�
�
�
....
�
-
1�
-
�
-----------------
-
•-
H1
-1
�!:0E0
�
)--< Fig. 3.42
3.5.2 Temporizador programado en un bloque de función {FB)
con un bloque de datos multi-instancia
Si un temporizador se programa en un bloque 0B o FC, estamos obligados a
asignar un DB de instancia para cada temporizador, pero cuando el temporizador
se programa en un bloque de función (FB), tenemos la posibilidad de aplicar el
concepto «multi-instancia», que quiere decir que en un mismo DB, que se
generará al hacer la llamada al FB, se guardará el estado de los parámetros de
cada uno de los temporizadores de forma independiente.
El concepto de «multi-instancia» indica que se generará en la zona de declaración
de parámetros del FB, y dentro de la zona de variables Static, tantas variables del
tipo IEC_TIMER como temporizadores se programen en ese FB.
pciones de llamada
lnstlt'ICil
indMdu■I
-de-
Nombr� IEC_
...
� M
...
_oo
__
....,.____.
]l
rrtúmt!ro
Q Mem.,191
0 Auwm,nco
E.! bloqu!' d� Í.lnc1ón n,m,do 9uerd1 sus. detos e>n un bloque'
de thltO} de IM$�n,1• propio
más..
Para ello, en el momento de
insertar un bloque temporizador,
aparecerá la siguiente ventana para
poder elegir entre un DB de
Instancia individual, que es como
se realiza en un 0B o FC, o bien con
un DB Multi-instancia.
Fig. 3.43
109](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-115-320.jpg)
![Unidad 3 - Programación con temporizadores IEC
110
En este caso seleccionaremos el DB Multi-instancia y modificamos su nombre,
observando cómo en el FB queda generada esa variable tipo IEC_TIMER en la zona
de declaración de parámetros.
Temporiudore,;
Nombre Tipo de dt�os Vtlor pr�n. �•nen,it Accesibl,de'Ple HMliOPC UA &ribible d�e HMliOl"C UA Visible en HMI Eng1nttring Valorde ajune ColT'MYOO
C • Input
<l ► OUtput
C ► ll'Out
e • Sta.oc
<:] • • lM_Ol
<J • n
0 • ET
0 • IN
<I • Q
O ► Te:mp
IEC_llMER
<m, ?=omi
llm, --J.W'•
Bool �-·
Bool .....
,J -O • Consu.n1 ____
_
No rem1neme ¡;¡;¡ ¡;¡;¡ ¡;¡¡
No remonence 0 0 0
No n!ffl;J�nt, 0 0
NQ remanentil! 0 � 0
No n!mantntl! 0
Ell.
Fig. 3.44
De la misma manera, podemos ir añadiendo temporizadores en este mismo
bloque FB, de forma que vayan apareciendodeclarados en la zona de parámetros.
En este caso declaramos la remanencia en la zona de declaración de parámetros
del propio FB en la columna Remanencia. Así podemos seleccionar qué
temporizador se desea hacer remanente.
También podríamos realizar la declaración de las variables de tipo IEC_TIMER
manualmente en el FB y obtendríamos el mismo efecto.
En cualquier caso, si ahora realizamos un programa dentro de ese mismo FB, de
forma que la instancia asociada al temporizador sea la variable estática TIM_0l
declarada anteriormente, tendremos:
1!0.3
#11M_01
"S3 SELECTOR IDN
AÍJroiM•N" 1íme
'XQ2.4
"H3_ROJO"
1---- IN Q ---------------{ }---<
"'1D1 1 0
·valor_
Pres.elección• PT
"'10100
E1 "líempo_Actual"
'XQ2.2
"Hl_VEROE'
Fig. 3.45a
fllM_O
l-
1-
.Q-----------------------1
}---< Fig. 3.45b
Ahora tan solo nos queda realizar la llamada a ese FB desde el OB1, en donde en
el momento de insertar el FB en un segmento nos aparece la ventana para asociar
el bloque de datos DB de instancia, por ejemplo:
Opcione-s de llamada 1
X
lnneincia
individual
Bloque de dalos
Nombre
Número
.-----------i-,
DB_F801
1 0
(!) Manual
Q Automático
..
El bloque de función llamado 9uarda ,;u� dato� en un bloq�
de d1tto:s .de irrrnrncia proptO.
más..
Fig. 3.46
Aceptar Cancelar](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-116-320.jpg)

![Unidad 3 - Programación con temporizadores IEC
Recuerda • • •
Otra opción para la
declaración de los
temporizadores es la
utilización de un DB
global donde se
declaren previamente
todos los
temporizadores a
utilizar con tipo de
datos «IEC_TIMER».
112
propio sistema y no es modificable por parte del usuario. Para que pueda ser
creado y modificado por el usuario debemos hacer uso de los bloques de datos
globales.
Por tanto, antes de entrar a utilizar los temporizadores en nuestro programa,
creamos un DB global llamado DB_TIMERS:
función
Tipo:
Lenguaje
Q m•nu1!
@ 1utom6tiw
�$Cripci6n
Lo, bloque, de d110, (De)s.Wn p1r1 1lm1c:enar dato, del programe.
-
Fig. 3.51
A continuación, declaramos tantas variables de tiempo con tipo
IEC_TIMER como temporizadores se vayan a utilizar, por ejemplo, tres:
de datos
OB_TIMERS
Nombre
, ,O • Staoc
<J • ► 1lM_01
<:J • ► 11M_02
.:;J • ► 11�03
Tipo de datos Offset Valor de itrunque RffnlnfflCII Acc�bledes.�HMIIOPC UA Ef;c:ribibled6de HMllOK � Visible en HMl Engme«ing Valor de IJl,me
IEC,.Jlt.t:A li O.O
IE(_llf.ER 16.0
IEC_TIM:R 3.2.0
Fig. 3.52
De forma que al desplegarlos observamos todos los parámetros que pueden
intervenir en un temporizador IEC:
DB_TIM:RS
Tipo dedatos Offstt Velor de -,ron.que Rffi1W1tn.t1a Acces.ible desdeHMliOPC UA Escnbible- dMe H""IJOPC UA Vísible M HMI Enginttring Val¡¡rdeIJl.lllt
-0 .... Static
<] ■ • llM__Ol IE.c_llM:A fil O.O 6il Q Q ¡¡;¡¡
., PT lime 4 0 ,:om Q 0 0 0
., . ET lime 8.0 "'°"'' liiil 0 0
e . '" Bool 12.1 tala Q 0 0 0
o . Q eool 2J �,. Q 0 0
<:I • • 11M_02 IEC_llt.EA 16.0 lii lii liiil ¡¡;¡¡
Cl PT lime 20.0 """"' liiil 0 � 0 '7
• <:J . ET 1imt- 24 0 TJIOcm ¡;¡¡ 0 0
0 <1 IN 8001 21U �lie li! 0 0 0
Cl . Q Bool 28� fals!' ¡;¡¡ 0 0
2 C • • llM_03 lfc.._1J.E.R 32 0 li! Q Q !iil
<l PT "llme 36D ',;l;lm� ¡;¡¡ 0 0 0
4 -O ET Time 40.0 "'""'' li1I 0 0
5 0 IN Bool 44.1 lslie lii 0 0 0
j Cl Q 8001 4<J �iu !iil 0 0
Fig. 3.53
Ahora, si queremos programar un temporizador en cualquier bloque de
programa, nos aparecerá como siempre una ventana para asignarle un DB de
instancia.
'-../
'-...,
-�,
'-...,
'---'
'-..,/
'-J
"J'
'-..,/
.....,
.....,
..J
'---"
--..J
_/](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-118-320.jpg)





















![Unidad 4 - Programación con contadores y comparadores IEC
134
Ejemplo:
Este es un pequeño programa de ejemplo:
'KI0-2
"S2_MARCHA"
,0810
"DBSTD_o1·
CID
lnt
'XQ2.2
"Hl_VERDE"
1-----cD
,.,3.1
"S5]ULSADOR
ACK'-LD
Q------..----------1 )----,
'-MW7016
"PROCESADAS
OI - SIN GRABADO"
'XQ2.4
"H3_ROJO"
15-PV NOT 1-¡ ----'( )----, fig. 4.16
En este caso el contador se ha elegido con un tipo de datos lnt, lo que significa
que es del tipo entero con signo de 16 bits (-32768 hasta 32767). Por tanto, puede
contener valores positivos y negativos.
Al accionar el pulsador ACK a través de la entrada 1 3.1, programado en la entrada
LD, el valor actual registrado en la salida CV contendrá el valor introducido a
través de la entrada PV.
Por cada pulso que le llegue por la entrada CD, a través de la entrada 1 0.2
correspondiente al pulsador MARCHA, el valor actual registrado en la salida CV
descontará una unidad.
Cuando el valor actual sea igual o inferior a O, la
salida Q quedará activada, poniendo en
funcionamiento el piloto verde y desconectando
el piloto rojo. El valor actual se mostrará en
todo momento en el registro MW7016
(Valor_Actual), que corresponde al visualizador
Ninguna de Valores de producción del panel
Registros de pedido y de contaje.
Igual que en el ejemplo anterior, para
comprobar el funcionamiento sobre la maqueta
3D, accederemos al panel Control del proceso,
para actuar sobre el pulsador MARCHA:
Registros de pedido y de ,:ontaJe
Fig. 4.17
520-M20 S21-H21 S2.2-H22 S23-H2l S24-H24 M2
Fig. 4.18
4.2.3 CTUD. Contador ascendente-descendente
El tipo de contador CTUD podemos decir que integra los dos tipos de contadores
anteriores CTU y CTD. Por tanto, puede registrar impulsos de forma ascendente y
descendente, y es por ello que cuenta con dos entradas de contaje: una para
incrementar (CU) y otra para decrementar (CD) una unidad su valor actual.
También dispone de entrada de puesta a cero (R) y entrada de preselección de un
valor inicial.
El contador IEC tipo CTUD dispone de los siguientes parámetros:
CU: entrada de pulsos para el contaje ascendente.
J](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-140-320.jpg)





![Unidad 4 - Programación con contadores y comparadores IEC
Recuerda • • •
Cuando se programa
un contador en un
bloque OB o FC se
debe asignar un DB de
instancia para cada
uno de ellos.
140
datos DB. En el ejemplo mostrado a continuación, en el D810 el funcionamiento
será semiautomático, ya que el contador registrará pulsos cada segundo
(M8191.5) mientras mantengamos accionado el pulsador de marcha (10.2). Es
decir, se está registrando el tiempo en segundos que se tiene accionado el
pulsador de marcha:
'11>1110
·oe_au_o1·
"II0.2 "IN81915 C1U °")2.2
"S2_MAACHA" "dock_l� lnt "Hl_VE:ROC-
1-------------V (lJ Q -----.,...----( 1----<
'112.6
"S4_AES[í - R
"IMW7016
"PROUSADAS
CV - SIN GRABADO"
'IQ2.4
"H3_RO.JO"
�W,008
"PE:OIOOSIN NOT1-----< 1----<
Fig. 4.31
GRABADO" PV
Al abrir el DB de instancia, sea cual sea el tipo de contador seleccionado, se
observa la declaraciónautomática de los parámetros siguientes:
08_ClU_01
OD ••• 0 0
-o. CD """' 01 ••• 0 0
• -o. • .... o� ••• 0 0
-o. u, """ 03 ... 0 0
-O• ou """' o, ••• 0 0
-O• ou """ 05 ••• 0 0
-O• ,.,, .. 2.0 o 0 0
-O. o, .. •» o ¡;¡¡ 0 ,;;¡
Fig. 4.32
Si antes de abrir el bloque de datos de instancia que
se ha guardado en nuestro proyecto dentro de la
carpeta Bloques de programa - Bloques de sistema
- Recursos de programa, lo seleccionamos y
elegimos la opción del menú Edición - Propiedades,
se abrirá una ventana de propiedades de este
bloque, en el que dentro de la opción Atributos
debemos deseleccionar el atributo Acceso
optimizado al bloque. Obtendremos la siguiente vista:
B_CTU_01 IDB101
Sdlos detJempo
CDmpil1ción
Protección
-
..
Fig. 4.34
0
0
0
0
0
0
0
0
� � 04_Uniro_DB (CJ'l.l1214CACJOCll!lyl
1 Coniguracíón de dispositívos
Yti Online ydisgnóstic.o
Bloques de programa
• Agreg8rnuevo bloque
:a-MB.inlOBl]
:a- Stl>rtup 10B100]
• '22- Bloques de sístems
• :a, Recur5os de progrt1me
-�----'· DB_C.lU_01 IDBlO]
Objetos tecnológicos
Fig. 4.33
Ahora, si volvemos a abrir ese mismo bloque de datos, se observa cómo aparece
una nueva columna llamada Offset en la que se muestran las direcciones
absolutas de cada parámetro dentro del DB:
J](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-146-320.jpg)

![Unidad 4 - Programación con contadores y comparadores IEC
142
De esta misma forma podemos declarar los diferentes contadores a utilizar en el
área de parámetros del FB. En el caso que se presenta a continuación es con dos
contadores:
.,.,,.... '(ipotifdlltOJ V""1rprnld. �tnerttlt Actflibledi'SOt'MMl/of'tUA �dncl.1-NfOf'CIJA Yi:llbk1.., HM1 lnpltlftring Viffl'd,� tmt'itfflllllo
<J ► lf19UI.
e • autput r -,
' <J ► lnout
' <J • 5tfbc
.(J • • COfrffADClll.Ol ICC:_COVH'!E'.A Ho rt,m1nel'k B B
• ... ClJ ,.,.,, .., Horem,ncnw 0 0 0
<I w ,.,.,, .., Norem,ntnte 0 0
,.,.,, .... '1cntffl1M"'41 0 0 0 .,
• <I ID .... .hr '1o rt!m1nenr. 0 0
1� <1 00 .... .... Noremtnt!'nlie 0 @ 0 ,..,,
..... 00 .... ... Ho f'li'ffllnt'nle 0 0 0 ,
•: ... "' '"' Ho ,.,,-i1tffflk1: 0 0 0
'Q ... O/ "" Ho rtm1MffM! 0 0 0 .,
14 4J • • C,OH'l'Al)Ol¡_02 lt.C_WOH"ltA Horem,nente Q lil Q
,;, ,Q ClJ .... ••• � ,e,,11� 0 0 0
1;;: -o w .... ••• ltforem,ncrtttt 0 @ 0 ,...,
17 <I .... ltkr Horem1nthtif 0 0 0
,,.., ID .... �IH' Noremfntrrle 0 0 0
,..., 00 .... W,11.- Nofl'm1n,:nw @ 0 0 .,
20 .., 00 .... frbt' Nowm,nrnte 0 0 0
., .., "' .. • tfortem1rse,,_ 0 0 0
.., O/ "" No fSfflltft'n11t
� � 0 .,
-o ► lemp
-O • C.omt.rlf
Fig. 4.39
Por tanto, utilizaremos para cada contador declarado sus propios parámetros sin que
estos se solapen entre sí, ya que esto provocaría un incorrecto funcionamiento.
Ahora tan solo nos queda realizar la
llamada a ese FB desde el 0B1. En el
momento de insertar el FB en un
segmento, nos aparece la ventana para
asociar el bloque de datos DB de instancia,
por ejemplo:
De modo que la llamada programada
queda de la siguiente forma:
10B1 1
·contador_
Poro metriado_
oe·
'IFBl
'tonlado,-
_�-
(i) Mfno,J
º""""'""º
U�ds'-'"r'Óf'Jl.1tt1tloput,'W )W ff'°" t'flun�
Of tft1M � ffl1lln!lf Jlft'PO
Fig. 4.40
EN
ENO --------------------< Fig. 4.41
Ahora, si abrimos el bloque de datos de instancia asociado a este FB, se observa
cómo aparecen todos los parámetros de los contadores declarados en el FB:
�-Vaa'•�-I>U
- '(
ipotk'dl'n ,..,dt!.«lffjtq..� timt,m:"t'I A«oibk.�MMllOf'C.UA r� tlwtltJ.N.'Ul'C.UA �"1....fnl,IINt.vinp Yi,1$)fdf�W �.c,rr,f>ffiW½
.., -
.., """"' --,
-a '"""'
,C] ... !,'W,-;
0 [
,,(] . . � 1.c_c:oow1rR 0 0
' .., ru .... ••• 0 0 0 r,
... ,n .... t,t,1· 0 0 @
• -O . .... .... 0 0 0 [7
.., IV .... .... 0 0 0 ,.,
QO .... .... 0 0 0
-O 00 .... .... 0 0 0
"' .. 0 0 0
"' ... 0 0 @
,n_<.ooH11J1- 0 0 @ 7
.... .... 0 @ 0 ,,
<P """ ..., 0 0 0
.... -•-•- 0 0 0
-O IV .... ��- 0 0 0
"" .... i,t--._, @ @ 0
00 .... t,JJ
.•
, @ 0 @
<J .,, ... • 0 0 0
"' .. @ @ @
Fig. 4.42
J
'..J](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-148-320.jpg)










!['
'
'
)
'
'
'
'
'
'
)
'
'
'
'
'
)
'
)
'
'
'
)
'
'
'
Unidad 4 - Programación con contadores y comparadores IEC
Una vez que el motor está funcionado, tenemos también dos opciones:
- Que haya una avería en el motor y por tanto el disyuntor (13.0) se dispare, o
bien que se haga saltar de forma manual. En este caso, el motor (Ql.1) y el
piloto de señalización verde (Q2.2) dejarán de funcionar, conectándose el
piloto amarillo (Q2.1) de forma intermitente (1 Hz). Al rearmar el disyuntor,
el motor seguirá sin funcionar y se apagará el piloto amarillo (Q2.1),
volviéndose a activar el piloto rojo (Q2.4).
- Que accionemos el pulsador de paro (10.1). En este caso, el motor (Ql.1) y el
piloto verde (Q2.2) dejarán de funcionar, activándose únicamente el piloto
rojo (Q2.4).
• Desarrollo del Grafcet
A continuación, se presenta el Grafcet que da respuesta al enunciado dado.
Dispararel disyuntor ( 13.0 )
M0.1 t-=1
=
.1
�----+--i N i-=
2
=
.2
�----<
Piloto oerde
Accionar pulsador d e paro ( 10.1 )
lntermi encia (M8191.S)
M0.2
• Programa en diagrama de contactos
El programa que responde al diseño del Grafcet dado sería el siguiente:
• Activación de etapas
• Segmento 1 : Activación de la ETAPA 1 ydesactivación de la ETAPAO
'IMO.O
"ETAPA O"
"1102
"S2_MARCHA"
"II0.1
"Sl]AAO"
'113.0
"F2_
PROlECCION 'IM0.1
MOlOR PAl.ETS" "ETAPA 1 •
'IM:�
A
f'
A
o
•
R }-----t Fig. 4.76a
• Segmento 2: Activación de la ETAPA O ydesactivación de la ETAPA 1
'IM0.1
"ETAPA 1"
"II0.1
"Sl]ARO"
------�
'IM0.0
"ETAPA O"
---��------;; s }-----t
'IM0.1
"E
T
AP
R�
'-------------1. ,.------ Fig. 4.76b
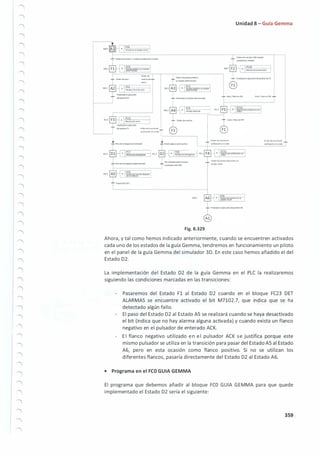
153](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-159-320.jpg)
















![Unidad 5 - Aplicaciones con flancos
Recuerda • • •
En las transiciones
podemos programar
un flanco, tanto para
una condición como
para una ecuación
booleana.
170
"II0.1
·s1_pARo"
"IM200.0
•Memorü, •
t----t/1---....------------------�R )------<
"113.0
"F2_
PROTECCION
MOlOR PALE15"
"112.4
"81 5 PALET
CARGA"
Fig. 5.17c
En la siguiente parte del programa se muestra que el motor se podrá poner en
marcha mediante las condiciones del flanco positivo (M200.0) y de forma manual
mediante el pulsador ACK (13.1):
..3.1
'55]JLS-"DOR
K.K'
'!IQl.1
ºKl M_MOTOR
CINTAPl'UT
t-�
---r---------------�1 )------<
Fra�
�
5.2. Programación en Grafcet (IV)
Fig. 5.17d
En esta cuarta entrega de aplicación del Grafcet exponemos cómo programar un
flanco tanto en una transición como en una acción asociada.
• Flanco en una transición
Para indicar en una transición que una condición o una ecuación booleana debe
funcionar por flanco se puede indicar de dos formas:
Para flanco positivo: flecha ascendente ( 1') o añadiendo la indicación FP o P.
+Detecta sen sor d e palet (FP)
12.4 (FP)
Flanco positivo de una condición
+Detecta sen sor de palet (1")
12.4 (1')
+(Detecta sen sor de palet y disyuntor rearmado) (FP)
(12.4 ' I3.0)( FP)
Flanco positivo de una ecuación
+(Detecta sensor de palet y disyuntor reami ado) (1') booleana
(12.4 ' 13.0)1 1')
Para flanco negativo: flecha descendente (-.v) o añadiendo la indicación FN o N.
+Accion ar pulsado r d e m archa (FN)
10.2 (FN)
Flanco negativo de una condición
+Acciona- pulsado r d e marcha (.J.,)
I0.2 (w)
+(Acx:ion ar el pulsador de march a y disyJ nto r rearmado) (.J,)
110.2 • I3.0X w1
Flanco negativo de una ecuación
+(Accion ar el pulsador de march a y disyu nto r rearmado) ( FN) booleana
(10.2 ' I3.0)I FN)](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-176-320.jpg)



















![Unidad 6 - Transferencia de datos y funciones matemáticas
Recuerda • • •
Las instrucciones de
incrementar (INC) y
decrementar (DEC)
funcionan por nivel. Por
tanto, lo normal será
programar en la
entrada «EN» un
flanco, de forma que
pueda incrementar o
decrementar una sola
unidad cada vez que
se cumpla la condición
programad en la
misma entrada.
190
antes en la salida ENO, ya que tan solo se verían en funcionamiento durante un
sean, hecho que hace imposible poderlo visualizar:
'!110.3
"S3_SELECTOR '!110.2
AfíO/MM "S2..MAACHA"
p
'!IM30.0
"FL'NCO 1 "
'!110.2
"S2_MAACHA"
'!110.3 '!113.1
"S3_SELECTOR ·ss_pul5J'OOR
AfíO/MM K.K"
p
'!IM30.1
'FLANCO 2"
'!113.1
'SS_p!JL5J'OOR
K.K"
INC
lnt
EN -
'!IMll'7010
"PROCESl'OAS
ROJAS" - IN/OUT
DEC
lnt
EN -
'IW>V7010
"PROCESJ'OAS
ROJAS" IN/OUT
'11()2.2
"Hl_fROE"
)----, Fig. 6.20
'11()2.3
"H2_./ZUL"
)----, Fig. 6.21
Ahora además podemos añadir alguna instrucción de comparación para
comprobar cuándo el valor actual del registro ha alcanzado o no un límite
indicado, como puede ser 10. En la solución presentada, hacemos que se señalice
mediante el funcionamiento intermitente (2 Hz) del piloto del pulsador de marcha
(Q3.1) cuando el valor sea inferior a 10, mientras que cuando el valor sea
superior, el piloto que funcionará intermitentemente será el correspondiente al
piloto del pulsador de ACK (Q3.2):
�;� -191.3
"Clod<_2Hz"
'11()3.1
'H5]UL5l'OOR_
MARCHA"
,;t
1-- ---
1/1- ------------
--1
1 0
)----,
OJAS"
-191.3
"Clod<...2Hz"
'IIQ3.2
"H6_pUL5l'OOR_
K.K"
�
OCES:�
l�t 1-- ---
l/l- ------------
--1
10
>--
Fig. 6.22
Fig. 6.23
También podemos poner a O el valor actual mediante la instrucción MOVE:
_RESET' K!VE
r2.6
!--- EN -
O -IN -,010
"PROCES/!OAS
,} oUTn-ROJAS" Fig. 6.24
En la solución presentada se realiza la inicialización del 0 11eg,,..,. d, p,aK1o y de contai< &i
registro de piezas rojas procesadas al accionar el
pulsador de reset (12.6), que corresponde al pulsador
Reset de los Valores de producción del panel Registros
de pedido y contaje del simulador 3D.
Fig. 6.25
J
J](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-196-320.jpg)




![1 �
'
1
'
'
'
'
�
'
'
'
�
)
Unidad 6 - Transferencia de datos y funciones matemáticas
Ahora tenemos que colocar en las diferentes
entradas de la función CALCULATE el 3 (IN1), el --,.
registro que contiene el valor de la tensión (IN2), el
registro que contiene el valor de la intensidad (IN3) y ;;::-::!
el registro que contiene el valor del cos p (IN4), y a
continuación introducir la siguiente expresión:
OUT:= SQRT(IN1) * (IN2) * (IN3) * (IN4)
La instrucción será esta:
Editar in�truccíón "Calrular"
OUT:• SQRT(IN1)*{1N2 • N])•0N.4
Ejemplo:
(INl • IN2) • (IN1 · !N2)
Poslbles lnstrucdones para Real:
<1?1> tN3
<11?>
CALCULAlE
111
OUT:•
Fig. 6.39
+, •, •,1, i'bt., Neg. hp, u, Frdc, Lo, Sin, A.Sin. Cos, N:.os, Tan, Alan, Sqr, Sqrt. Aound, Ceil, Floor, Trunc
Fig. 6.40
El programa quedará de la siguiente forma:
CM.CULA.ll
..., 1 "'"'"
A.al io IM
1-----rn -------•·
OUT,. SQRT/IN1r(INl)*(!Nl
30, IN1 1MD'2
'JMW1002
'l"fDIDOIIOJAS" 1Nl
"lMW100◄
'l"fOIOO
AM'l,AIU,AS' IN)
0..8 · IN-1 •�
....., 1MW7010
"l'Offncia' tN 'MIOCESM>AS
____ OLIT IIOJAS"
Fig. 6.41
El valor resultante de la función CALCULATE, a través del parámetro OUT, es el
resultado final en formato real, y como lo queremos presentar en el display de
piezas Procesadas Rojas debemos pasarlo a valor entero (lnt). Es por ello que
utilizamos la función ROUND.
Se puede observar en la instrucción CALCULATE como aparecen unos cuadrados
de forma automática en les entradas IN2 e IN3, esto sucede porque ha detectado
que en esas dos entradas, las variables asociadas son valores del tipo entero y
dado que el formato de la instrucción es Real, la propia instrucción CALCULATE
realiza la conversión de los datos de esas dos entradas al formato Real.
6.2.6 Funciones MIN, MAX y LIM
Las instrucciones para la evaluación de los datos introducidos a través de sus
entradas son:
o MIN: da como resultado en su salida el valor mínimo de los presentados a
través de los parámetros de entrada.
o MAX: da como resultado en su salida el valor máximo de los presentados a
través de los parámetros de entrada.
o LIM: da como resultado un valor comprendido entre dos límites asociados a
los parámetros de entrada (MAX y MIN), siendo estos los valores máximo y
mínimo que podrá presentar en su salida (OUT).
195](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-201-320.jpg)


























![Unidad 7 - Programación estructurada
222
filroye:Ctcl [dl(,ó,n V,,t ll'IHIUI Onlonc- Opc:10M1 t1t111.(r,orntu otm.n1. �
Totally lntegrated Automatlon
PORTAL
J( 1• -. X q. (l. . � !I! !E l. CI �
- o C)
• _J utllOA0_7
ri A¡¡:re91.r di1pcxiwo
tl. l>i$fJCKiuvos ylf'dti
• Jl lntroóut-ciol'l!CfU 1214CN:IOC/ft....
l!'t Con�ur1clbn1Mdilpoliuvot
� Online yditgnónito
.. SP, llloqvet dt progrem•
WI NJ�•, - bloq_
• u1in foe1 1
• St1rtup!Oe100¡
·�ol_f�.)torimnt1t !FCtOI
► 1IJ 8loq11•1 de 1istem1.
► Objet01i ttcnoi6gt<ot
► (;j fuentt1 e111tm.1
► v,,..�s ritc
► 'llpos dit d11os"-.C
► �blHde obunv1uón yrontdo.•
► 11.ctvps ONW'le
► � Trtttl
► 01.tot óeproll)'"dt ditpolitivo
i!!!t lnbrm1.c.&!ftl p,ogr1.m1.
)J lht11 de �xtos
► .-Wldulosloc.1.lu
-4 ... -41... -o- @ ._. .J
• Tftulo del bloque: eloqt1e fC p1r1 el contt01dtlt�honJDnt1I
Conuol dtl clindro biut1bM dt1 t-� horlmnt1I dtl m1.roipuitdordt c1.ra-
• Seg�nto 1:
► .:!iJ O,,.r•c-t 169101 co._ �
► [§) TtmporillldOttt ;¡1
► f:!¡ Cont11dom A
► (!] Com¡lirtd6n
► :..=.J f11Mione1 m1.�m,utu
► ll'emftrerw:ill
► !S3 Corwu1i6n
► . Contr0tdel p,ogr1m1
t------,,====�,:,;,;..,;;;;;;,__....,,,,,.,,.,,_!:!":�--:-1 ► !:b/ 0f>HICÍOl'IH l6g1CU C0
'===-=--�·S,.Prop
e
da
de
s ====...:.::====---'----!► Ouplu1m�n10 yro�dw C::
�--,,----------------- •!
lnform1ci&l
Stlloi dt Mmpo
COITl.pllui6n
l'ffl1tcci6n
Atributos
Gener,111 --------------' •
Fig. 7.8
En la parte inferior se muestran las propiedades, en las que se observa cómo
podemos modificar tanto el nombre simbólico, el lenguaje de programación y el
número de bloque asignado. En la parte superior tenemos el editor de programa
para introducir el programa deseado.
A continuación, introducimos el programa que representa el funcionamiento del
control del cilindro del eje horizontal del manipulador de carga mediante los
pulsadores S20 y S21:
wt,s Tlf,, IJNlíMO 7 IINIOAO 7 - )(
l'fo)KtO [dico6n Vtl ll'IStnllf 0fllllt Opc;,onn �"•m,.llt.u Vtm.nt A)Udt
Totalty lntegrated Automatlon
..:J � I] <-niarp,oy,ecto .. X !.!i -. )( ") ! P'. -¡¡ m líi ■ Q # fwbi«et"Coneo6n onlitle ,,
• PORTAL
�
0 0
• _J U,(IOl,D_7
. Agreg1td1spos,ú,,o
.. O"po1i!ivos yttdH
• :-. 01_.-.troduttlon ¡aiu 1214CKJOQ'llt)1
1Jt eori1iguracióri dt d1spositivos
:i, Oflliflt yd;tgn6nic:o
• .i,1 81oques dt progr•m•
'fl .-.gregar �vo bloque
• .,.,,qoe11
• su.m.p 1oe1001
• �
_,,,
HonlDfltal tF<��
► ._. TttCH
► O.t0, 0f l)l'O)l)'dt d15posiwo
fi!l lrlbrm•ciófllMIPJ09rHflt
_
.,l!t.Jstu dt �lil0$
> Vh,ta detalladll
... .... ...,... ...
o
... @ .... J
., Tftulodel bloque: eloque fC ptrt tl conuQ!d,le,e hofimnut
Cori!tOl dtlcílind,o dtl tjt h<lriXH'ttt l dtl mtllipultdordt ctrgt
�
..,.,
'IIS , •n_vt:NlOSA
s2o
l-
·
---------------
-
''
--i
zQu1E.
�
�
..,.,
1'S, � "'l'l_VENTOSA
'"1--
" ----------1
'º'"�
Fig. 7.9
� ----,.i
j_gProp!edadet 1�Información � Diagnóstico
• Aplicación utilizando un bloque de función FB sin parámetros
Realizamos la misma operac1on que para la creac1on del FC. En primer lugar,
seleccionamos la opción Agregar nuevo bloque que encontramos dentro del árbol
del proyecto y dentro de la carpeta Bloques de programa:
.'-.../
-J
._____:](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-228-320.jpg)

![Unidad 7 - Programación estructurada
224
t...,..,,.
"'"-
l,.,. biolUl"I M illOCml "'" bioqwJ � que ffp,nllln 1"s �,,.,,.. ff ít,m,• �rienw
,.,bioq..s ft d9ffl fl ,nsianci.,M modoqw ,.,ue11 111Mndo ,r¡pon,W., IH,pl,lft el•
¡tto(Utr�lt,loqut
Fig. 7.13
Si accionamos el botón Aceptar, en ese momento ya nos aparece dentro de la
carpeta Bloques de programa el bloque Control_Cilindro_Marcado (FB10)
creado, que automáticamente queda abierto para ser programado:
hv)wclD fMi,,,, v., 1n1,n.r., � Opc-s .,..,...,._, v...,- �
TOC.Qy lnt.gr•t.dAutom•tkln
,..! � Q .....__,. ... ' '" X lrl t (l!J • � ID ti ■ C J/ fM!lc•<�"""'- •
4
A, fl!! !I • PORTAL
p •
.
JUMD,A0_7
f/ 11g,...,da,.,.11Mt
lli, 01$po,MM,l)',.clel
..,. .,9 lnlnMMd11n fC,U IZI«;�
ft eon6p'lc'6ti 6e dupo,�
.Y.i Onlirwtchl9fl6J1KO
eJu.iue•cf•l""'9••
'li AflWl•rnueYObioqu<I
• 1.111.. 1oe1¡
• swra,,p[o1100J
e ConDoiJjt_ttorqoni,I frc10¡
e eorriiol_Ciw>dfo.J.111,ttdolftlOJ
► :V, lloq1,u lh 1i$W1nt
► Obftl0$1t(ll(li6gk:Of
► 'llf Puentas Hte-mu
► !;. v,.,.i.,,t.c
► 11pof dt clt1:01 ,U:
• ':.t ttbl,udtobu...,.cióflr"'-dop,ir
► .11,,kcb,p,onlirlf
► - ll'fCH
► l& O.toSIM pro,.-H dupo1-
llla lnllrmeci6ndel p,Offt"'I
.
� I.JstH IHW)IQ'I
__¡;¡¡_g
.. E a •jgJ_••� •
-
�
-
to lo di 1 9 '• '-, J. ' Si li
°""
=
'°"
;;;"
;;.,.==
..c.
,
.-,
:;¡
.,.-,;
,J
.-1
:
) h"'Ofhos
f
1-
v
..._
1,_
•
.-
=--
..
-
,,-
.,---I¡•
,-.. -o- -40• -o- @ ....
• lftulo dill b4oqua:
• s.gmento 1: --�--------- --
1
1
, I" �......
► /:;,
J O¡M..�slóg'lcH CQl'l l,,tt
► !i) 1"111potiadOfH
► (;j eonc.ifo,u
► ..s,! C""'p,t,.co6n
• Pvn<_s_w,_...,
► lt1M,_,.nc:..
• � (-r¡,ón
• io conw1c1e1�"'•
► � Open(IOM, 16gM:41J COtlJNllbns l
► Oe1pll•lfl..""' Jl'CWa6n
�Propledadff f'11m(>flTIIKlón l.'U.
1
Oí�MflicQ IIIll • > h,ql»tes opdoNiles
• c-ot� • c-,DLdllio.-
Fig. 7.14
A continuación, introducimos el programa que representa el funcionamiento del
control del cilindro de marcado mediante dos pulsadores, 522 y 523:
� !dou6n ,,,., i..u111, � Opc--. He,...,,_, ,.,__,.. �
� Q Gunlr� .. )( I• ,:'. )( ") t ('lll t •jb fl! l, ■ Q j/ Eal&•C.......--- ¿f
.. ut«l,IC,.1
r/ Ag,,i¡¡t,disp,:,silnlo
.. Dlipo,.._ y..6-1
• ·• lmnlClll<c...,(� 121<�
ft eorr6g111td6nff lm�i(i,,(,s
ij OnlirMy'-gn6uico
• r. Mc,qws k p""'tni•
lf 'trt1111!111f"O�llt
. ...... 10111
• �1t� 1011001
• Comn1UJtJICn.,.,1tl lf'{IO]
- �Cilinón:>J.ltlf'l'.t�olFBIO}
► ..¡. e�s Msin•~
► 04itf!OS�N
► r_. ,i..,,nu ...WrNI
► 1'4i v,111t>1uP1.C
► 1pos ff ÑIO!, 'I.C
► C;i1tbln Mol>H.-..ci6n y...,_do��
► [-. e.au,, onliiw
► ltn•s
► !a o.ios depoo,_-ff d11po,ilM:I
lia, IMDffllfa6nÑlpn,gr•"'·
•
" �ltl ff-
.
1 -o- -'IJ► -o- @ -
u2·
.,
....
..,,.,,...
�
..,
1----------------< )---,
COIP"MltftD'
...
·u,·
j� �!nforrn.nlon U Y.l 0i,9<'6stko
• c-ot..r,._ -�aln.
Fig. 7.15
" ► l"'", Ge111ttl
► $ 0peff(ioMJ lóf1CH COft bm
► � Ttmponackffs
► 9i C-IXlfH
► :,.11 C<,,IJNr1Co6n
, ·
, funcioneu11,1tmhu1
► 'hns•-.nu-
• ► !l( '-,si6n
► � Co<loolffl llfOIJ,."'•
, i;.. 0P<1rtd11M1 16focas c.,,.ro.tobns
► 0Hpla111"',.""'�rcuó6n
__,'](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-230-320.jpg)



![Unidad 7 - Programación estructurada
228
Orden_Avanzar_Cilindro
Orden_Retroceder_Cilindro
G::""'- ..........,_
�-�
t--
�------------------l
c-,d;:_.
• s.grnento l:
1
�
-;
-
•EV_
r--4
=..
�
..
_
-,__________________
.."""=�
Bloque FC o FB con parámetros
Fig. 7.23
EV_Avanzar_Cilindro
EV_Retroc�er_Cilindro
En el siguiente ejemplo se muestra cómo se va a ejecutar el bloque FBlO con
parámetros desde dos puntos diferentes del programa principal programado en el
bloque 0B1:
Fig. 7.24
• Aplicación utilizando una función FC con parámetros
Si partimos del programa creado anteriormente en el bloque FClO, pero
creándolo en otro FCl, llamado Control_Cilindro_FC:
Proyeao Edición 'ttr tm.ert.tr Onfü4! Opoones Hfrramif.nr.a,; 'UntltN ►
roully lntagrated Al.itotn.ador1
PORTAL
' _! fd <iuo"""P""""°
Oispositlvo.s
� Q C)
• ¡_J UNIDAD]
W�R!qardKJXKióvo
a. Di,;JXKitMx y�de,;
► ÚI 01_1ntroducdon (tJILI U14C ...
• WII01_1ntrodlJ()don_1 (CRJ 1l1◄...
fft Configuración de dKposml/'o,;
jd Online ydk19n&itio=.o
.,. � BloquH de progr<1miS
lllf' f,,gn!gar nuevo bloque
. Mlin (OB1)
:ti- Startup (OIS100J
1---=c�•
�
c_
on
_
tro
-
l..,Silindro.,,_
F< {FC1Jj
► [¡ Objeto1i tecoo16gicot
► � Fuente,; ,earM1i
► '4 Vi1ridble1 PLC
► llpos de d;ato, l'l.C
► �!T;sblH de ob-.ervaci6nyfor:t.-
811chrps online
► !:;¡ Tr.sce,
► � Daros de proxyde ditpositivo
� lnlorm<tCIÓo del program11
..il Li�t.t,; de te>CJ:<X
► [ti �ulo,; loc,de,;
> Vbta detallada
-1t- -1rt- --<r ® L..t, J
• Título del bloque:
Com�nuno
■ • Se,91mtnto 1: Mtnipuladord>! catga. fje horimntalfl>!�uov,iMJla bi,mabl>!. �..p�?a1r1t P·-
'IQ0.1
'115.3 •y2 lt:Hlt)'5A
20
1---
º --------t
A llQUfE;::...
�egmento 2:
'IQ02
'IIS 4 "Yl YENTOSA
21�
·-------------------•
-0
7
f��
ªVt-it49enentl • Cootrol_Clln...
Fig. 7.25
'---
'- -
. ,,..](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-234-320.jpg)





![Unidad 7 - Programación estructurada
234
• ..J I.HOA0_7
,. ,_,"-9",4-pot
- 0..pn-)'fffe•
1 r¡o)llnw<<...,(Cl'U,nc_
• ;a, 01_............<icif...l fCl'U111<L
9't con1g1nta1••,.,.,,,.....
j. 0..y61..IIUI
• '., Noqut-,. ...........
• ...,.,,_,,.,w.qw
- �..10111
• s.u.""PfOIIOOI
• Cc<ttrol_Cinl"'_PC (Kt]
• ;,.¡ °""......cnol6pc...
• -- 'wnlH�•
'111"""11••-•KM'O•
. ........ta.l'l.C
► :-..líposciedtlOSl'I.C:
1 Toblu . ......,..aolo,7111,:..,.
► r- a.�ri,,e
1 O,,iot ..,,..,...,:i;.,_...,
iij_ .......o6,,llelJ1'D911-
....,H.-
1 fj"'6du1Dsloc•lt•
• '.a .,._,.�...,1aiun1c:,a_
• · l'l.(;.1 (0'U12141CIIIGIDClll,I
o,<>OtWi �
....ie-• >'
....... ,.,,....
)( ll')t ra · .¡¡ !J li ■ C J/ Mbll,c•__.,� ";,,
�
- ... ... ...,► -u- 1!!I .... j
• CJSeg,nenco l: Ulm1dl,ncond.<.GNJpor••�••l"'°""1N llelK1 ptrl_.(lhnck,,Mie�horimnal
,..,,,,..
.,.....w._
X torrtr
..
, �..rta••f9"'e-
- o,...,...,
f. '�';, ' �::-
""
�..::
rl ""•"""_,,..no
<,,.,,,,,.,(�
-
Fig. 7.40
� -Ml:
Qrl..lay,)t•l
Clrl-Mo)ll•.f'
,...,
0,0.C
·¡
• :.�..,.,,.,.........
► � �.
► ;,,oc-,_,...,
► !}J l'W>ciooM, .............
1 btr11rf'ellOI
, S, c-,io,
► 'it; CorolrcllNIPIOfl'I"'•
► � �,.._, lof,cn c,o,,ptltbf.1
Nos aparecerá una nueva ventana dividida en dos zonas: la de la izquierda
muestra la configuración antigua y la de la derecha muestra la nueva, que es la
que quedaría si aceptamos la última actualización:
1ntt-r6unueva
=
· -�;::::==::;;;;:;::===-
"Control_dllnd:ro_fC"
1-------""'EN
Ordc-n_
'115.3 A�•n•r
·s20· C.hndro
Orden_
"IIS.<I �uoceder_
·s21• Cíhndro
ENO 1------, EN
'IQO.l
EV_Avon:ar_ "Y2_V
Cilindro AlZQ'
EV_ 'YQO
Retroct'ftr 'Y3_.,f,
C,hndr0 AOER
> <
Fig. 7.41
Ordc-n_
'115.3 Aven:111r_
·s20· Cilmdro
Orde-n_
'!itS.<1 Rit1rocedt'r_
·s21· Cilmdro
�1tetor_
Olindro_
En este caso, es obvio, pulsamos el botón Aceptar y así podemos completar en los
campos correspondientes los datos que faltan. Al final queda el siguiente
programa para las dos llamadas de los dos cilindros:
Segmento 1: Uamade incondicional pare t-jeocutar e-1 programe dt-1 FCl para i!I cilindro deo] eo¡e horizontal • Segmento 2: Llamada incondi.etonal pera eo¡eocutar el programa del FC1 pera t-1 cilindro marcador
,,.,
-control_Cilndro_Ft::'
1------- EN
On:leon_
"IIS.3 Avan?llr_
•s20· - Cilindro
Ordeon_
115.4 �trocl!deor_
•s21°
- Cilindro
'IIO 7
"84 bl Dett-ctor_
VENTOSA dlindro
IZQUIERDA' - Avanc!'-
'112.6
ºS4_RESE1" - Reseot_ConUJdor
'IMWJ010
"PROCESADAS Maniobras
ROJAS" -Rnlizadas-
ENO -------------<
'IQO.l
EV Avanmr ºY2_VHfTOSA
- Cilindr; --4A IZQUIERDA"
EV_ 'rQ0.2
Retroct-deor_ "Y3_VENTOSA
Cilindro --4A DERECHA"
Fig. 7.42
1------ EN
".US..5 Avanzar_
·s22· - Cilindro
Ordt-n_
'115.6 �troct-dt-r_
"S23" - Cilindro
'll15
'BlO_t-1 Dett-ctor_
�- - �
��
n
:c�-
'112.6
ºS4_RESE1" - �st-t_Contador
'IMW1014
"PROCf.SADAS """niobras
VERDE" - Realizadas-
ENQ -------------<
'IQO 6
EV_lwanmr_ "Y7_8AJAA.
Cilindro --4M'.RCA[)OR"
EV_ "Kl0.7
Retroct-dt-r_ "YB_SUBIR
Cilindro --4 W;RCAOOR"
Fig. 7.43
Si realizamos la comprobación del programa con el simulador 3D haciendo uso del
panel Control de proceso y del panel Registros de pedido y de contaje,
observaremos que los contadores no funcionan correctamente por efecto de la
declaración del flanco como variable del tipo TEMP. Si se declara como variable
lnOut, entonces tenemos que asignar un registro a ese nuevo parámetro que nos
J](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-240-320.jpg)
![1
'
1
1
'
'
1
'
1
'
1
1
1
1
1
1
1
'
Recuerda • • •
Una función FC con
parámetros es aquella
que contiene un
programa en donde el
resultado de su
ejecución dependerá
del estado que tengan
en ese momento los
diferentes parámetros
configurados.
Unidad 7 - Programación estructurada
aparecerá en la llamada al FCl. Esto es tan solo un ejemplo de que los FC son
válidos, pero tiene sus limitaciones. Es por ello que para la elaboración de bloques
de programa se determina que la mayoría de sus parámetros sean del tipo Input,
Output e lnOut, y se utilizan las variables de tipo TEMP para alguna operación
intermedia, pero que no sea entre otras cosas un flanco. En estos bloques de
programa FC, si existe algún parámetro declarado como TEMP, no se podrán
hacer varias llamadas a esa función, ya que se solaparán los datos y funcionará de
forma incorrecta. Tan solo se podrá realizar más de una llamada a una función FC
cuando no exista ningún parámetro del tipo TEMP declarado.
Para poder solucionar este problema y obtener otras ventajas, se utilizan los
bloques de función FB que pasamos a exponer a continuación.
• Aplicación utilizando una función FB con parámetros
Seleccionamos la opción Agregar nuevo bloque que encontramos dentro del
árbol del proyecto y dentro de la carpeta Bloques de programa:
• ...:1 u.t0,•CU
.,..._,...,.,._
ao..,.._,,....,.
• '.Jl o1_�do>nltJIU IJI«:�
• ,a o,_,.-.CclDl.,.fl fCN tllC:�
lf '°"""'"<IM 4't d"PO<
.J,j 0ftlint , ••¡n6<11<0
..........clt,.,......
• !llol¡uel clt lKlelM
1 !. � <K,IOi6g,c01
•Sil--•·-·
, :.11....blt, ru:
• � • ..- ru:
• .;.- tot,¡o• c1t ob..,..•••,-,,.,.,.,,.,.ne.,..
1 , ' lklu4Konlioo
• hcu
• '& o.iix .,. pnnrcltdi<posJIM
1Í'1 1'11Dt1t11c,6ndtlp,o,Jtl"'I
.!i]u<..,clt_
• .,a Mlod.Jo<loult,
� . .... _. . ...lo
Fig. 7.44
• ,:S10p,t....-16p,.,c...M1
• . k"'po,,•-•
' 4'-"-•
• �c-.,....áWI
• �"""'-•-.....-..
• ;3h!llfort"""
• &¡ C-,.16n
> 3:0 Co,,tro1 df,l ,.._lfl•
> :a 0,.,.<ioNl l6góc<Oll (Ultbtu
, 0up1111n,,.,..o�-ci6n
Repitiendo el mismo procedimiento que hemos utilizado para crear un bloque FC,
crearemos otro nuevo módulo, en este caso un FB al que asignaremos el nombre
Control_Cilindro_FB. Cuando ya lo tengamos abierto, lo que hemos de hacer es
declarar los diferentes parámetros, y para ello nos fijaremos en la parte superior
de la ventana de edición del programa donde encontraremos la zona para la
declaración de los parámetros:
"'°'"'1D (4,t,6n ..... ....,i,, � �· i........,._, .......... ,,,,...,.
•, X lr) 1 ('l< ·l. !fl lli & C ;1 �-�..,._ '-
<t
• L;i1n0,.cv
,,...,.i",..,..,....
11i.o..,.._,_,
, :. 01_.........<loollCNUlC:�
• ;,¡a o1.-......do<l.,.fl lCPU1216C�
rt c.m,.n,....."°'.....
,i OMNyNf'Di,co
• ·.; 11oqu<, d1 pt"1'•"'"
,,...,..,.,_...�
. ...... ¡o.11
• 11""1'iOllOOJ
• c-_c-,,,Ja :,.,¡
.�.................
• � Olr;t.... �
. --··-·
• :.,v.Mblul'l.C
t ""4N<lno1:11'lC
• - ttblo1 Nobn.....o6nylb!ado1M•
l ..,r;I IUl"PS-
1 - hU'
. ..°"...."""......poi...,
- �KONllfel ,....tllll
:!' .... ... ., � � 1:�a .air:a.1 .¡iit�· t ,�ti'"� .-.��- m
Contral.Olindro_f8
.. SegmeAIQ 1:______
_
Fig. 7.45
• _, c.t......1
• .!!. 0,.••--•16to<••((lllb$ i!
• 1l11t111,....a-• ;-
' .!..11 �' 111,
• :ii �p,of'K06ol
. ,__.,,.,....,.,.......
1 .............
• c-.lHl,..,,nfflt
• ,f:1 0,.,_..,., W.,.C.,CMpo�
• � o
..pi..,,,_,_..,
f
235](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-241-320.jpg)


![Unidad 7 - Programación estructurada
238
Parámetros de entrada/salida: se declaran aquellos parámetros de los que el FB
necesita leer su estado para poder ejecutar su programa y, además, escribir,
porque es el resultado de alguna operación programada.
o Maniobras_Realizadas
Static: este tipo de variables se utiliza para guardar operaciones intermedias en el
bloque de datos de instancia asociado.
o Flanco
Para ello, basta con elegir el campo correspondiente, escribir el nombre de la
variable en la columna Nombre y seleccionar el tipo de variable en el desplegable
que aparece en la columna Tipo de datos. Nos quedaría así:
�b�
ffndro
F8 T,pod,d,a,5 v.io..p,MeL �lf AaesibltdedeHWI VlsiblnnHMI Vtlordn11Me �¡
<J .,. Input J:"
<J • Orden_lwtrisr_Ctlndro 8om Gll 1t1H No l'tmoenwE] O O
<J • Orüen_�uucffer_Citindni eoot •"• Nortmtneimt B O
<I • Df'tectoc_Olindro_Awr,ce BOCK libe Ho �nteMntir O O
-O • �nt..toiu.d<N" aoot hbe Nb ,..m,Mna! O O "7i
€1 • Ov1Put r
-O • E'V_.rw.nair_Cíltfldro &ool laln lto rtm1nentf' O O
<J • tv_,-ll'oc.ed,H_Cílindro Bool fl!s, No l'el'tll�IIW o E)
G • "°"'
..., �..
Fig. 7.50
No se ha declarado ningún parámetro del tipo:
EJ
9
o
Q
Temp: se declaran aquellos parámetros que van a trabajar de forma interna y que
no son ni de entrada ni de salida, por ejemplo, para operaciones internas.
A continuación, introducimos el programa en la parte de edición, donde al querer
escribir el nombre de la variable se desplegará una ventana con todas las variables
declaradas en el proyecto, además de las e "IC2"'-�'°" º""' �EZAS" 8001 w2.o
declaradas como parámetros. Estas variables se
reconocen porque carecen del símbolo de etiqueta
en su izquierda, su nombre empieza con el símbolo
# y no están asociadas a ninguna variable del PLC:
Una vez introducido el programa, tendremos:
,. Segmento 1: �spla?Jr a posición de BVllnce
iM11niobras_�1h.?Bdn
tarden_Aven11r_Cilindro
IOrden_Retroceder_Cifindro
f'�set_ConQdor
• ·so_EM:RGENOA.
•s1_PARO•
•s2_MARCHA•
Fig. 7.51
Orden iEV..)llranzar_
8001
Bool
8001
Bool
8001
Bool
Bool
�CBl
l--
nd
_
ro
__________________
_
Olk,dro
)----i Fig. 7.52a
• Segmento 2: Despla:,re posición de �poso
lndro
#EV_
Retroceder_
Ollndro
µOrd:;;,
1---------------------1 )----i Fig. 7.52b
Segmento 3: Contaje: del número de maniobras que reali31 ,el cilindro
#Detector_ INC
Cilindro_Ava nce lnt
P 1---------EN -
ftFlanco #Maniobras
Reelimdas--,INiOUT
Fig. 7.52c
--º
--•
"-10.2
.....__,,
......](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-244-320.jpg)


!['
'
'
'
1
'
'
'
'
1
,,
'
'
'
'
'
'
'
'
'
'
1
'
'
'
1
1
Recuerda • • •
Un bloque de función
FB con parámetros es
aquel que contiene un
programa en el que el
resultado de su
ejecución dependerá
del estado que tengan
en ese momento los
diferentes parámetros
configurados. La
diferencia con una FC
es que los datos de la
ejecución del
programa serán
memorizados en un DB
de instancia.
Unidad 7 - Programación estructurada
COiumna Significado
Valor de arranque Valorque debe adoptar ta variable durante el arranque.
AJ aearel bfoquede datos, losvalOfes predetemilnados definidos en un bloquelógico se utilizancomo
vak>res de arranque. Estosvalores aplicados pueden sustituirse aquí"Poi'vaJofesde arranque específicos de la
inslanaa.
La indicadón <le un valor de arranque es Ol)Clonal. SI no se especdica nll1gÚn valor. la variable adoota el valor
P<e<le!erminado durante el arranciue. SI tamPoCO se ha definido ninQún vaJor 1><edetarmlnadO, se utiliza et
vaJoreslMdar villdO para ti UP<> dt datos. Por ejemplo, ti valoresündar de 800t.. ea 'FAI.SE"
Valor de obselVaclón Valorde datos actual en la CPU.
Esta coll.mna sevisualiza si existe una conexión onHne yse hace dieen el botón "ObseNar todo·.
Instantánea Muestra losvalores que se han cargado desde el dispositivo.
Fig. 7.60
A continuación, podemos comprobar el funcionamiento cargando todos los
bloques de programa, como es el 0B1, el FBl y el D81, aunque como se observa
en la ventana que nos aparece, ya nos avisa de los bloques que no existen o bien
que no son coincidentes con los existentes actualmente en la CPU y que además
se utilizan en el programa. Por tanto, es necesario cargarlos.
Poniendo online el programa con el PLC, visualizamos los estados de los
parámetros del bloque de función FBl:
• Ufll<l"'_J
.,,.,..,.,..._
· tfrll--)-
• 11101.�¡uu1iuc�
• .,,.._--..,_,<icJU1UC:KJO.,
· �¡;�:!::.
<
- G •
lc � Y.......••
. ...........,...._ .
.,,.........,_w..o,
.-.....10111 •
•*-ll)a•OOI •
•c......�flP••I e
i �.c.....,_1■J111fll111 e
• t--'.,.a-....,...115_, IDIJJ •
• 011,,w�
..,....--.
. ◄�....w...,u •
. .....w••,u
, _,.w
.....,..
.._...,,.,..,..,,...,
. _..............
l ;:1 1'Hn �-IUP'·---
·1=-��=- _.
..
�,OO .:.__
) í
19..-t.o.......-:fU"O•-- i
... ......
.., J'lnkl,l"
--.;:..
--
1,! • t, .. •I (l ♦l el
_ .....,...._
1,�;¡;.:;....,__._,.,
•o..·•- -=·--=-
]!:.;·�·�-
==----:......:____..:!i_
��-1--------c-.,.,,--..,....l:"'"
:;;;;;;;:::;:¡;:,..:.�c._·t:.=-.:::-........
> VltUl.t:.lllrdol '"IJ"""'--'ln O DI
Fig. 7.61
Si hacemos doble clic sobre el mismo bloque FB llamado, se abre automáticamente
el editor del programa de ese bloque, en el que, tras ponerlo online con el PLC,
tendremos la visualización actual del funcionamiento del programa:
• -•y
r¡.,.,._
. o.,.._,....
, :ai_,__.,,...,¡oouut__.,,
• !l .,._..,.,..,_,c ¡vu,z,�.oc.o
• ...11,...-........,.¡w,:i;�-- Cil
n�--�
s. °"",.......,.
........,......_ .
..,.,_....,
•i.-ic-11
·"-IOt,lfOI
•t....,._r....,._111t111
l t....c..�..••JlllfflJ
1 t-.i..m....n..tt11..1 �
· -
,,_,__
• 4Vll"""""l'U.
• ,......,u.
._..................._,___
' �
• · t1o••,.....,..._
i, _._.
..4,t,..._
Uoll•·
. ... ........ln
Fig. 7.62
◄► ◄,► - e - ...,
... �l, on,111,•••-•""••••"'·"'
..::::;...
i l f··--------
"' "'"'°"".....
-¡-• ., t, "'" •I '1 4ij ¿¡
.., ,.,_,..__.....
Fig. 7.63
241](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-247-320.jpg)




















![Unidad 7 - Programación estructurada
262
• Programa en diagrama de contactos
Antes de empezar a introducir el programa presentamos el diseño para
determinar cómo vamos a estructurarlo:
f,!;_1-
: (Grafcet pnncipal) ,f.
�'?').wr,J�
(Salidas)
Fig. 7.130
Por tanto, nuestro proyecto estará formado por los siguientes bloques de
programa:
• .al 04_Ejer<kKJ MACRO MAltOOOft(CPU 12HCA,C/OC/IU)I
fJ't Configuración de dispositivos
� Online ydiagn6sóco
Bloques de programe
IrAgregarnuevo bloque
• Cyclic interrupt 108301
,a.Moin(OBI]
• Startup 1oe100J
• oo_GO_Grafcet principal (FCll
• 01_Gl_Gr1fcet maestro (FC2J
• 02_G2_Greftet esclavo(FC3)
• 02_Salidas (FC4J
a, 03_'Temporizadores (FC5J
a- 04_Conuido�s (FC6J
.. OS_fon:ados fFOI
• � Bloques de sistema
.., 57 �cursos de programa
1 Iec_counter_0_08 (0821
l 1ec_límer_o_oe (081I
Fig. 7.131
De este modo, el programa de cada uno de los bloques, que responde al diseño
de los Grafcet dados, sería el siguiente:
o FCl. Grafcet principal. Activación de etapas.
Segmento 1: Activación de la ETAPA 21 yde,activación de la ETAPA 20
"/,M2.0
"ETAPA20"
'1.I0.2
"S2_MARCHA"
'110.1
"S1_?ARO"
'J.M2.1
"ETAPA 21"
;
s
>---
"/,M2.o
"
ETAPRA
�
'----------;. .------- Fig. 7.132a
• Segmento 2: Activación de la ETAPA 22 yde,activación de la ETAPA 21
"/,M2.1
"ETAPA 21"
'110.1 'J.M2.2
"S1_?ARO" "ETAPA 22"
l/lf------r-- ----;;
s >---
"/,M2.1
"
ET
APRA
�
'--------------t- .------- Fig. 7.132b
1-------,1 1-
1 -.------](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-268-320.jpg)
!['
'
'
'
'
'
'
'
'
'
'
'
'
)
'
1
Unidad 7 - Programación estructurada
Segmento 3: Activación de la ETAPA 20ydesactivación de la ETAPA22
'IM2.2
"ETAPA22"
'IMO.O
"ETAPAO"
'IM2.0
"ETAPA20"
'IM22
;s}-------,
"ETAP
R
A
�
'---------------1- ,------, Fig. 7.132c
o FC2. Grafcet maestro. Activación de etapas.
• Segmento 1: Acuv1cióndr 11 EWA l ydenctr.r1d6n dr 11 ETAPA O
"IIU -., o 11U
ºB7_d0WL11 ·es_cOWLll '89_1!'0
......,
"ETAPA l"
"".:;',
1-
·••
_
· ___
·e:2"
-I Al-
;-
,._--
�
-1
=
1-
•
-
· ---
�
-1
��
1-
"°
-
· __-
_
""'
-1 "'" '
U��
WA Cí"
•>----
Fig. 7.133a
• Segmento 3: ActIV1c16n de 11 ETN'A3 ydencti11c16n dr la ETAl'A_
MAC!IO
�-
--
'•- � --
�
'IM)A
1 _,..
�-•
1
_
,
e
-
A
"ET.N'ASl"
'IM).]
ºET.N'A 3"
�------------f-�
Fig. 7.133c
'IM).5
"ETN'AS"
;
s
)-----<
....,_.
�------------
·
-
MKRQ
-(
R �
Fig. 7.133e
....,.,
"ETN'A7"
;
s
)-----<
....,_.
�------------·
-
MKRQ
..... �
Fig. 7.133g
• Segmento 9: Actw,c:rón � I• ETAPAOydl'UttlYll;IÓn de lt ETAl'AIIN;CRO_td
�-
º
1 __,, -
A
"ETN'ASr
"'"'·º
"ETN'AO"
;
s
)-----<
"""'·º
�------------•
-
MKRQ
-(
R �
Fig. 7.133i
... Segmento 2:
....,_,
"ETN'A 1"
• Segmento 4:
'IMl.3
"ETN'A 3"
• Segmento 6:
....,_,
"ETN'AS"
W1.3
"B8_d1 MULTl
GR,&NOE FUERA"
..,.,
"B7_d0 KILTI
GIWIDE
OENTRO"
W1.1
"86_c1 MULTI
PEQUEÑO
FUEPA"
Fig. 7.133b
....,.,
"M.ACRO_la"
;
s
)-----<
....,_,
�-------
-rr
-1:
A
�
....,_.
"MN:RO_lb"
�------------·-(;
Fig. 7.133d
..,.,
"86_c1 MULTI
PEQUEÑO
FUERA"
Fig. 7.133f
....,_.
"Ml<RO_lc"
�-------
-rr
-1
�
•
�
• Segmento 8: Activ.ci6n dr l1 ETAPAMICA0_1d :,_
d,
_
n
_
u
_
w,
_
,�
_
o
_
d_
, 1
_
,_
n
_
�
_
A?
_________
....,_,
"ETN'A T
..,.o
"B5_c0 MJLTI
PEQUEÑO
DENTRO"
;s
)-----<
'IMl.7
�------------
•-<
rr:
A
�
Fig. 7.133h
Segmento 10: Uem1d1 al bloque de programa de Ttmpori:adores
1 i,3_Tem�,•
� EN ______ ENO -----------------<
Fig. 7.133j
� EN EN0 ------------------1
Fig. 7.133k
263](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-269-320.jpg)









































![· ,
'
'
1
'
'
'
'
Recuerda • • •
El Estado Al es el
estado de la guía
Gemma que indica
que el proceso se
encuentra detenido en
el estado inicial,
mientras que en el
estado Fl se
representa la
secuencia de
funcionamiento normal
del proceso.
, Recuerda • • •
1
)
1
El Estado A2 nos
indicará que se ha
solicitado una parada
del proceso al final del
ciclo actual de
funcionamiento.
Unidad 8 - Guía Gemma
'IIM8190.2 'IIMO.O
"AlwaysTRUE" "GG_ESTAOO Al "
rl-�-----------------{(s )--------,
'IIM0.1
"GG_ESTAOO Al"
�---------------<( RESET_BF }---<
13 Fig. 8.96
• Programa del Estado Al. Parada en estado inicial
El Estado Al Parada en estado inicial es un estado en el que el proceso se encuentra
totalmentedetenido, bien sea al inicio de la puesta en marcha, dado que es la etapa
inicial del Grafcet de la guía Gemma, o como en este caso se quiere representar,
cuando una vez puesto en funcionamiento, se desee detener el proceso.
Por tanto, este estado normalmente no tiene asociado ningún programa, sino que
nos indicará que el proceso se encuentra detenido de forma estable a la espera
de una orden por parte del operador.
• Modificación del programa asociado al Estado Fl. Producción normal
Antes de programar la guía Gemma, en la primera transición del Grafcet de Fl el
pulsador de marcha y las condiciones iniciales estaban como transición. Al
implementar la guía Gemma, podemos observar que para acceder del Estado Al
al Estado Fl ya se han de cumplir todas esas condiciones, por lo cual no sería
necesario que también estuvieran en el Grafcet del Estado Fl. En su lugar, para
sincronizar el Grafcet, pondremos la marca M0.6 que corresponde al Estado Fl.
M4.0
M4 1 @] M6 5 @]
Fig. 8.97
De este modo, modificaremos el segmento 1 del FC9 (Estado Fl), que quedará de
la siguiente forma.
..- Segroonto 1: AOIVAOÓJ'{ Of ETAPA JI Y Df lAfT.,PA 6S 'f CIESACffVAOÓN OE LAS �'r"l'A40
W4.0 4™0.6
'ETAPA 40' 'GG_ESTAOO Fl'
W4.1
'ETAPA 4 1 "
1---� r-�------------!S )------,
'JIM65
1-------------1 S )------,
W4.0
•rrAPA40"
'------------< R )------,
Fig. 8.98
• Programa asociado al Estado A2. Parada solicitada a final de ciclo
En el Estado A2 Parada solicitada a final de ciclo, la guía Gemma nos indica que se
ha de realizar una parada al finalizar el ciclo de funcionamiento que esté realizando
la producción normal (Estado Fl). Por tanto, el Grafcet del conjunto formado por el
manipulador de carga y el manipulador de grabado deberá seguir funcionando al
305](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-311-320.jpg)
![Unidad 8 - Guía Gemma
306
igual que lo hacía cuando la guía Gemma se encontraba en el Estado Fl. Esto quiere '-.../
decir que el Grafcet asociado al Estado A2 será el mismo que el implementado en
el Estado Fl con la siguiente modificación:
El retorno que viene de la finalización del ciclo y que está conectado a la divergencia
en Y hay que llevarlo a la entrada de la etapa inicial 40.
M4.0
Estadofl ( M0.6 )
M41
@]
M6 5 @]
Fig. 8.99
Por tanto, copiaremos el Grafcet que hay en el bloque FC9 (Estado Fl) en el FC2
(Estado A2) y modificaremos el último segmento del Grafcet grabador-carga que
quedará de la siguiente forma.
Modificamos la última transición, de forma que cuando esta se cumpla, en lugar de
activar las Etapas 41 y 65, se active la etapa 40.
• Segmento 3S: ACTIVAOÓN OE lA EW
...40. Y DESACTTVACIÓN OE LAEWA 52Y76
....5.2
•nAPA S2"
41M7.6
>-----------1 R )------,
'lM7.6
•nAPA76.
'------------<• )-----< Fig. 8.100
Los otros dos Grafcet, tanto el del motor de la cinta transportadora de piezas como
el del motor de la cinta trasportadora de palets, no sufren ninguna modificación.
• Comprobación del funcionamiento de los estados Al, Fl y A2
Para poder comprobar el funcionamiento,
debemos primero transferir el programa al
simulador PLCSim. A continuación, hemos de
abrir el simulador 3D, que quedará como se
observa a continuación.
Pulsaremos los botones CONTROL PROCESO,
GUIA GEMMA y REGISTROS. Con ello se nos
abrirán los tres paneles que necesitamos para
poder probar el ejercicio.
Fig. 8.78
V
V
J
V](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-312-320.jpg)



![Unidad 8 - Guía Gemma
310
Una vez el sistema se encuentra cumpliendo las condiciones de preparación para
la puesta en marcha, automáticamente deberá pasar el control de la guía Gemma
al Estado Fl y el proceso arrancará de forma automática para realizar el ciclo de
producción normal.
• Modificación del 08100
En el OB100 tenemos que añadir la inicialización del Grafcet F2, para lo que
activaremos la etapa inicial del Grafcet F2 y desactivaremos todas las demás etapas.
• Segmento 5 : Activación d i!' 1 1 Et11pa 20 dl!'I Graft� F2 ydl!'sectiYación d e las dl!'mu etllplS
'V,,!8190.2 'IM2.0
"AlwaysTRUE" "F2_ETAPA 20"
f-
1 ----------------M-___,
'IM2.1
"F2_ETAPA 2 1 "
L----------------�
( RESET_BF )-
1 4
• Programa del estado F2
Fig. 8.102b
,,.. Segmento 1: INICIO tllfl.lACAOÓN fN.,,.. Atw,tiOn l!Upt21 'Jl!ta¡a 24ydes1Cliv1t16" l!Up• 20
'AMZ.O -AMJ.7
"F2_ETAPA 20" "GG_ESTADO F2"
'IIM2.1
"F2_ETAPA 2 1 "
f---
--
----1 �-�------------I S )----<
'IIM2.4
"F2_ETAPA 24"
1---------------Js f--
....,_.
"F2_ETAPA 20"
L----------------I R )--
Fig. 8.103
• Segmento 3: l,W,l!l'UlAOORGRASAOOllActi,,1trén l!tfPI 23)'dl!Ut'tlV.tJónetapi 22..
'IM2.2
"F2_fTAPA 22"
'111.0
"B5 cO MULTI
l{
QUE�O
DENTRO"
'Jll1.2
"B7_d0 MULTI
GRANDE
OEt-ílRO"
Fig. 8.105
llM2.3
"F2_ETAPA 23"
:s
>-------
,...,.,
L_______
·,_
,
_
-i
ET�
�
• Segmento 5: MANIPUl.>DORDt CAIIGA. Actlacoón •ttp. 26ydesectiv1cióneu.p1 25'--
-------'
1W2.5
"f2_ETAPA 25"
'110.6
'83_b0
VENTOSA
DERECHA"
'IM2.6
"F2_ETAPA 26"
�25
i
s
)---
c_____________.
_
'__,
2_
ET
�
�
Fig. 8.107
• Segmento ]: MANll"'UI.ADORDE CAAGA. Acuv1t1ón etap. 28ydu.c:Weción er.p1 27.
VA2.7
"f2_ ETAPA 27"
'112.0
"B1 1 fl PEZA
SÜJETA"
'JIM3.0
"F2
...ETAPA 30"
w2.1
;
s
)---
L___________
·,_
u,��
Fig. 8.109
,...,.,
"f2_ETAPA 21 "
'1111A
"89_e0
MARCAOOR
ARRJBA"
W2.2
"F2_ETAPA 22"
llM2.1
:
s
)------<
c_____________·
_
,
2
__,
_
ET
;
�
Fig. 8.104
• Segmento4: t.W-111'1.JI.ADOROECARGAAl;tinción tttpt 25ydu1ctfl/1d6n ,mp• 2*
'11125
'IM2.4 "B1 6_PEZA
"F2_ETAPA 24" BAJO VENTOSA"
llM25
"F2_E.TAPA 25"
W2.4
:s
)------<
L...-----------
·,
_
2_
-{
ET;�
Fig. 8.106
• Segmento 6: !wW'!PUl.AOOROt CARGA.Attt-,11tión et1p1 21ydes,ctiv1ctén •t•�26
llM2.6
"F2_ETAPA 26"
�05
"B2_a1
VENTOSA
ABAJO"
llMl.7
"F2_ETAPA 2r
llM2.6
:
s
>-------
c_____________
·,_
2_
ET
�
�
Fig. 8.108
• Segmento &: �INLAOOR Ot CAAGA.AttiVtción tt11� 29ydtSICIÍtl!Ción eQ.� 30
llM3.0
"F2_ETAPA 30"
'110.4
·e,_ao
VHITOSA
ARREA
º
W3.1
"F2_ETAPA 3 1 "
1M3.0
:s
)------<
L____________
·,_
,_-{
ET��
Fig. 8.110
V](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-316-320.jpg)




















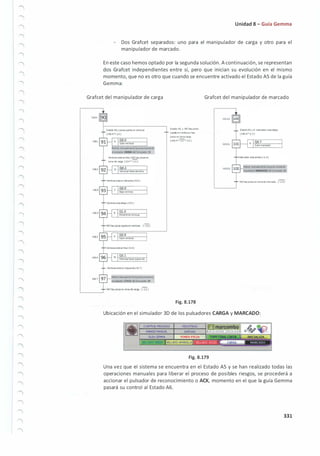























!['
'
'
'
'
1
1
• Segmento 1:
Unidad 8 - Guía Gemma
• Segmento 5:
1 •oETECCIÓN AVERÍAS•
r EN ENO --------------
Fig. 8.307
• Diseño del programa del Estado 02. FC8 DIAGNOSIS AVERÍAS
Una vez que en la guía Gemma se haya detectado cualquier avería, se activará el
Estado D2 y se desactivarán los demás estados. Dentro del Estado D2 se realizará
una diagnosis detallada de cada uno de los cilindros y ventosas que contempla
nuestro proceso. Eso nos permitirá conocer si la avería ha sido producida por el
fallo de un sensor o porque una electroválvula se ha estropeado.
La diagnosis la realizaremos mediante el uso de tres bloques diferentes
parametrizables:
• FB4 DIAGNOSIS AVERÍA BIESTABLE.
• FBS DIAGNOSIS AVERÍA MONOESTABLE.
• FB6 DIAGNOSIS AVERÍA VENTOSA.
La estructura del bloque FB4 servirá para diagnosticar averías en las electroválvulas
biestables y tendrá la siguiente declaración de variables:
DIAGNOSIS AVERíABIESTABLE
Nomb� Tipo de datos v,to1predet JlrmM>ff!C,a Acc:es,bled Vis,ble ff! V1IOf dea
CI .. inpt,I
-O . OROENEV+ """ fais:e No rem_ E] !i! i1I
-O . ORDEN EV- """ fa�e No rem.11ne_ ¡¡¡ Q
-O . DETECTOR .a1 """ ,.,, No rema.ne_ Q Q
5 -o . DETECTORaO """ faise No remane_ Q Q
<I . """'"'
<l ' AVERÍAEV + """ •a�e No remane_ Q Q
-o . AVEIÚA. EV · """ "'' No remane_. iiil 0
<J . AVERiAOETECTOR a1 """ f,1fse No remane- iiil Q
I" -0 • AVER!4. DETECTOR aO """ fal!E No remane_ !i! Q
<I . """"
Fig. 8.308
,... Segmento 2:
1 #"OR�
#"AVERÍA
r
EN
,_
EV
_
+
_
·_
•
_
•o
_
ETE
-<
CT
.r>
O
-
R_
,o
_
• _
••_
oE
_
TE
U
CT
t-
0-
R ,
_
, •
______
o
_
ETE
--<
CTO
�
#"DETECTOR ao· #"DETECTOR a l . #"AVERÍA E V +"
r--
Fig. 8.309 Fig. 8.310
• Segmento 3: • Segmento 4:
[
__
#"OR'.
#"AVERÍA
F
EN
I-
EV
_·
_
· _
•
_
·o
_
m
_
i.
ª
,f
º
-
R_
,,
_
· _
.-_
oE
_
TE
v
cr
,...
o_
R ,
_
o·______
º
_
ETE
....¡
C
To�
I
ro
�
•N
I-
E
_
v-
_
·
_
··
_
om
-i
CT
I-
OR
_
,
_
, ·
_
·
_
·o
_
m
-t
CT
,f
O
-
R_
•º
_
· ______
•·A
---i
VERíA
�
Fig. 8.311 Fig. 8.312
Enel momento en quese ejecute el Estado D2, indicará que el sistema seha detenido
por la avería de alguno de los actuadores o detectores del sistema. Para localizar las
averías en las electroválvulas y en los detectores, seguiremos la siguiente lógica:
Segmento 1:
Si hemos dado la #ORDEN EV +, no detecta el #DETECTOR a0 y no detecta
#DETECTOR al, indicará que el cilindro habrá avanzado y, por lo tanto, si no detecta el
#DETECTOR al, este se encuentra averiado. En ese caso se activará el bit #AVERIA
DETECTOR al.
355](https://image.slidesharecdn.com/edoc-230912043108-196b32de/85/edoc-pub_automatas-programables-siemens-grafcet-y-guia-gemm-pdf-361-320.jpg)