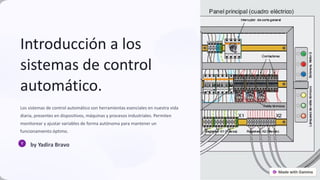
Introducción a los
sistemasde control
automático.
Los sistemas de control automático son herramientas esenciales en nuestra vida
diaria, presentes en dispositivos, máquinas y procesos industriales. Permiten
monitorear y ajustar variables de forma autónoma para mantener un
funcionamiento óptimo.
by Yadira Bravo
preencoded.png
2.
Aplicaciones de lossistemas de control
automático.
Hogares inteligentes
Controlan la temperatura, iluminación, seguridad
seguridad y electrodomésticos del hogar de
de forma autónoma para aumentar la eficiencia y
eficiencia y comodidad.
Industria Manufacturera
Optimizan procesos de producción, errores
humanos y aumentan la productividad en fábricas
fábricas y plantas industriales.
Sistemas Aeroespaciales.
Permiten el vuelo autónomo de aviones y naves
espaciales, mejorando la seguridad y precisión de
las operaciones.
Vehículos Autónomos.
Controlan la dirección, aceleración y
frenado
frenado
automóviles, aviones y barcos sin
intervención humana.
preencoded.png
3.
¿Qué es elcontrol automático?
El control automático se refiere a la capacidad de los sistemas de regular y
ajustar su propio funcionamiento sin intervención humana directa. Estos
sistemas monitorizan constantemente variables clave y ajustan parámetros para
mantener un rendimiento óptimo y estable.
El objetivo del control automático es lograr que los sistemas funcionen de
funcionen de manera autosuficiente y autosegulada, sin necesidad de
supervisión continua. Esto aumenta la eficiencia, la confiabilidad y la precisión
precisión de las operaciones.
preencoded.png
4.
Línea de tiempodel desarrollo de los
sistemas de control automático.
1 Ancient
Desde la Antigua Grecia y Roma, los ingenieros desarrollaron mecanismos de control primitivos
control primitivos para regular el flujo de agua y otras aplicaciones.
2 Siglo XVIII
Durante la Revolución Industrial, se vieron los primeros sistemas de control automático en
máquinas de vapor y molinos de viento.
3 Siglo XX
El desarrollo de teorías de control moderno, como el control PID y sistemas de
retroalimentación, impulsaron el crecimiento de los sistemas de control automático.
automático.
preencoded.png
5.
1
1901
El estadounidense NikolaTesla patentó el
patentó el primer sistema de control
automático para regular la velocidad de
velocidad de las máquinas eléctricas.
eléctricas.
2 1932
El ingeniero noruego Nyquist desarrolló el
desarrolló el criterio de estabilidad de
de Nyquist, que permitía analizar la
estabilidad de los sistemas de control
control automático.
3
1948
El matemático estadounidense Wiener acuñó el término
término "cibernética" y sentó las bases para el estudio de los
estudio de los sistemas de control automático y la teoría de
teoría de la información.
4 1956
El ingeniero y matemático estadounidense Richard E.
E. Bellman introdujo el concepto de "programación
"programación dinámica", una técnica para resolver
resolver problemas de control óptimo.
5
1960
Se desarrollaron los primeros sistemas de control
automático digitales, utilizando computadoras para
para realizar cálculos y ajustes más precisos.
6 1970
Se popularizó la técnica de control PID (Proporcional-
Integral
Integral
-
-
Derivativo), que se convirtió en uno de los métodos más
métodos más utilizados en los sistemas de control automático.
automático.
7
1980
Se introdujeron los primeros sistemas de control automático basados en
basados en inteligencia artificial, utilizando algoritmos de aprendizaje
aprendizaje automático y redes neuronales.
8
1990
El desarrollo de la microelectrónica permitió la
la fabricación de controladores más pequeños y
pequeños y eficientes, lo que impulsó la
automatización en diversas industrias. preencoded.png
6.
R E PR E S E N T A C I Ó N
E N
D I A G R A M A S D E B L O Q U E S
4/25/2025 6
7.
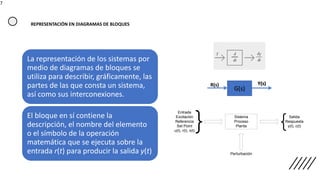
La representación delos sistemas por
medio de diagramas de bloques se
utiliza para describir, gráficamente, las
partes de las que consta un sistema,
así como sus interconexiones.
El bloque en sí contiene la
descripción, el nombre del elemento
o el símbolo de la operación
matemática que se ejecuta sobre la
entrada r(t) para producir la salida y(t)
7
G(s)
R(s) Y(s)
Sistema
Proceso
Planta
Entrada
Excitación
Referencia
Set Point
u(t), r(t), x(t)
Salida
Respuesta
y(t), c(t)
} }
Perturbación
REPRESENTACIÓN EN DIAGRAMAS DE BLOQUES
8.
REPRESENTACIÓN EN
DIAGRAMAS DE
BLOQUES
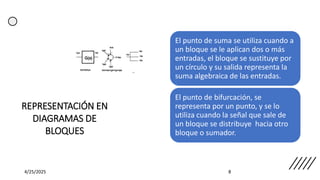
Elpunto de suma se utiliza cuando a
un bloque se le aplican dos o más
entradas, el bloque se sustituye por
un círculo y su salida representa la
suma algebraica de las entradas.
El punto de bifurcación, se
representa por un punto, y se lo
utiliza cuando la señal que sale de
un bloque se distribuye hacia otro
bloque o sumador.
4/25/2025 8
9.
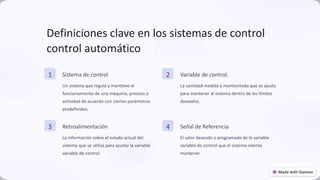
Definiciones clave enlos sistemas de control
control automático
1 Sistema de control
Un sistema que regula y mantiene el
funcionamiento de una máquina, proceso o
actividad de acuerdo con ciertos parámetros
predefinidos.
2 Variable de control.
La cantidad medida y monitoreada que se ajusta
para mantener el sistema dentro de los límites
deseados.
3 Retroalimentación
La información sobre el estado actual del
sistema que se utiliza para ajustar la variable
variable de control.
4 Señal de Referencia
El valor deseado o programado de la variable
variable de control que el sistema intenta
mantener.
preencoded.png
10.
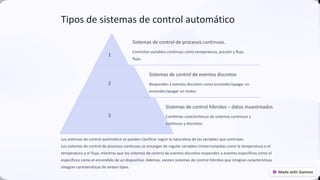
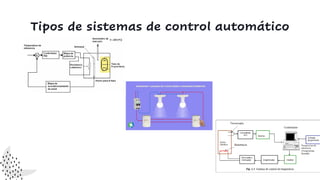
Tipos de sistemasde control automático
1
Sistemas de control de procesos continuos.
Controlan variables continuas como temperatura, presión y flujo.
flujo.
2
Sistemas de control de eventos discretos
Responden a eventos discretos como encender/apagar un
encender/apagar un motor.
3
Sistemas de control híbridos – datos muestreados
Combinan características de sistemas continuos y
continuos y discretos.
Los sistemas de control automático se pueden clasificar según la naturaleza de las variables que controlan.
Los sistemas de control de procesos continuos se encargan de regular variables ininterrumpidas como la temperatura o el
temperatura o el flujo, mientras que los sistemas de control de eventos discretos responden a eventos específicos como el
específicos como el encendido de un dispositivo. Además, existen sistemas de control híbridos que integran características
integran características de ambos tipos. preencoded.png
O B JE T I V O S
B Á S I C O S D E
C O N T R O L
S E G U I M I E N T O ,
R E G U L A C I O N Y
E S T A B I L I D A D
4/25/2025 12
13.
4/25/2025 13
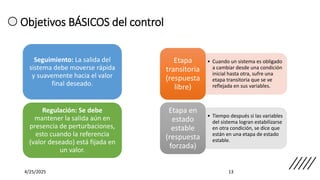
Seguimiento: Lasalida del
sistema debe moverse rápida
y suavemente hacia el valor
final deseado.
Regulación: Se debe
mantener la salida aún en
presencia de perturbaciones,
esto cuando la referencia
(valor deseado) está fijada en
un valor.
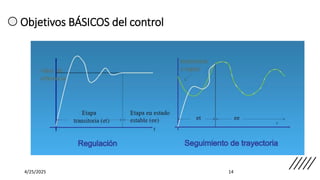
Objetivos BÁSICOS del control
• Cuando un sistema es obligado
a cambiar desde una condición
inicial hasta otra, sufre una
etapa transitoria que se ve
reflejada en sus variables.
Etapa
transitoria
(respuesta
libre)
• Tiempo después si las variables
del sistema logran estabilizarse
en otra condición, se dice que
están en una etapa de estado
estable.
Etapa en
estado
estable
(respuesta
forzada)
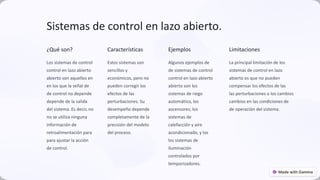
Sistemas de controlen lazo abierto.
¿Qué son?
Los sistemas de control
control en lazo abierto
abierto son aquellos en
en los que la señal de
de control no depende
depende de la salida
del sistema. Es decir, no
no se utiliza ninguna
información de
retroalimentación para
para ajustar la acción
de control.
Características
Estos sistemas son
sencillos y
económicos, pero no
pueden corregir los
efectos de las
perturbaciones. Su
desempeño depende
completamente de la
precisión del modelo
del proceso.
Ejemplos
Algunos ejemplos de
de sistemas de control
control en lazo abierto
abierto son los
sistemas de riego
automático, los
ascensores, los
sistemas de
calefacción y aire
acondicionado, y los
los sistemas de
iluminación
controlados por
temporizadores.
Limitaciones
La principal limitación de los
sistemas de control en lazo
abierto es que no pueden
compensar los efectos de las
las perturbaciones o los cambios
cambios en las condiciones de
de operación del sistema.
preencoded.png
16.
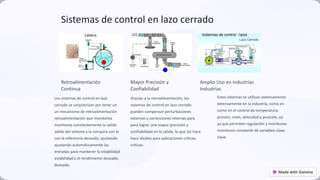
Sistemas de controlen lazo cerrado
Retroalimentación
Continua
Los sistemas de control en lazo
cerrado se caracterizan por tener un
un mecanismo de retroalimentación
retroalimentación que monitorea
monitorea constantemente la salida
salida del sistema y la compara con la
con la referencia deseada, ajustando
ajustando automáticamente las
entradas para mantener la estabilidad
estabilidad y el rendimiento deseado.
deseado.
Mayor Precisión y
Confiabilidad
Gracias a la retroalimentación, los
sistemas de control en lazo cerrado
pueden compensar perturbaciones
externas y correcciones internas para
para lograr una mayor precisión y
confiabilidad en la salida, lo que los hace
hace ideales para aplicaciones críticas.
críticas.
Amplio Uso en Industrias
Industrias
Estos sistemas se utilizan extensamente
extensamente en la industria, como en
como en el control de temperatura,
presión, nivel, velocidad y posición, ya
ya que permiten regulación y monitoreo
monitoreo constante de variables clave.
clave.
preencoded.png
17.
Ejemplos de sistemasde control automático.
automático.
Los sistemas de control automático se encuentran en una amplia variedad de aplicaciones, desde la
aplicaciones, desde la industria hasta el hogar. Algunos ejemplos destacados incluyen:
Los sistemas de control de clima en edificios, que regulan temperatura, humedad y ventilación de
ventilación de manera autónoma. Los pilotos automáticos en aviones mantienen la trayectoria y altitud
trayectoria y altitud sin intervención del piloto. Los robots industriales que realizan tareas repetitivas con
repetitivas con precisión y eficiencia.
preencoded.png
18.
Controlador Actuador Sistema
Qin
Qout
EntradaSalida
Nivel
Qin
Qout
LT
LC LI
Nivel
deseado
Nivel (L)
Controlador Actuador Sistema
Entrada
r(t)
Salida
Variable
controlada
y(t)
Transductor
+
-
Error actuante
e(t)
Señal de
control
c(t)
Variable
manipulada
u(t)
Variable
medida
m(t)
Trayectoria directa
Trayectoria de realimentación
Lazo de control
19.
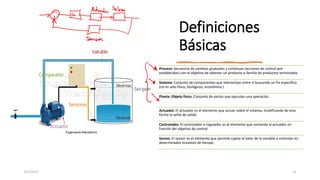
Definiciones
Básicas
4/25/2025 20
Proceso: Secuenciade cambios graduales y continuos (acciones de control pre-
establecidas) con el objetivo de obtener un producto o familia de productos terminados
Sistema: Conjunto de componentes que interactúan entre sí buscando un fin específico.
(no es solo físico, biológicos, económico )
Planta: Objeto físico .Conjunto de partes que ejecutan una operación.
Actuador. El actuador es el elemento que actuar sobre el sistema, modificando de esta
forma la señal de salida.
Controlador. El controlador o regulador es el elemento que comanda al actuador en
función del objetivo de control.
Sensor. El sensor es el elemento que permite captar el valor de la variable a controlar en
determinados instantes de tiempo
20.
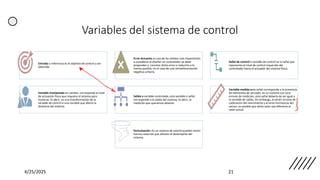
Variables del sistemade control
4/25/2025 21
Entrada o referencia es el objetivo de control a ser
obtenido
Error Actuante es una de las señales más importantes
a considerar al diseñar un controlador se debe
propender a cancelar dicho error o reducirlo a lo
menos posible, en el caso de una retroalimentación
negativa unitaria.
Señal de control o variable de control es la señal que
representa el nivel de control requerido del
controlador hacia el actuador del sistema físico.
Variable manipulada en cambio, corresponde al nivel
de actuación física que requiere el sistema para
moverse. Es decir, es una transformación de la
variable de control a una variable que afecta la
dinámica del sistema.
Salida o variable controlada, esta variable o señal
corresponde a la salida del sistema, es decir, la
medición que queremos obtener
Variable medida esta señal corresponde a la presencia
de elementos de sensado, en un sistema con cero
errores de medición, esta señal debería de ser igual a
la variable de salida. Sin embargo, al existir errores de
calibración del instrumento y errores intrínsecos del
sensor, es posible que dicho valor sea diferente al
valor actual.
Perturbación: En un sistema de control pueden existir
fuerzas externas que afecten el desempeño del
sistema.
E J ER C I C I O
I D E N T I F I C A R L O S E L E M E N T O S
Y V A R I A B L E S D E U N S I S T E M A
D E C O N T R O L
25.
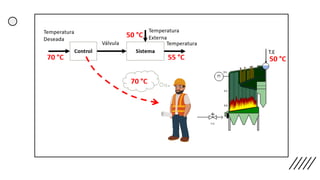
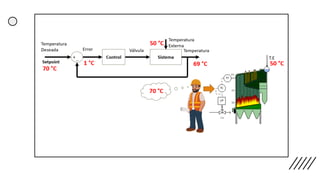
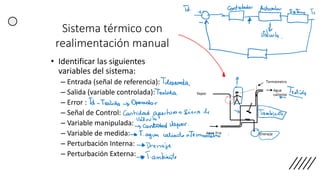
Sistema térmico con
realimentaciónmanual
• Identificar las siguientes
variables del sistema:
– Entrada (señal de referencia):
– Salida (variable controlada):
– Error :
– Señal de Control:
– Variable manipulada:
– Variable de medida:
– Perturbación Interna:
– Perturbación Externa:
26.
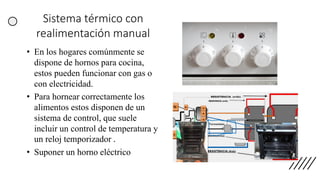
Sistema térmico con
realimentaciónmanual
• En los hogares comúnmente se
dispone de hornos para cocina,
estos pueden funcionar con gas o
con electricidad.
• Para hornear correctamente los
alimentos estos disponen de un
sistema de control, que suele
incluir un control de temperatura y
un reloj temporizador .
• Suponer un horno eléctrico
28.
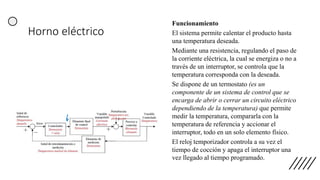
Horno eléctrico
Funcionamiento
El sistemapermite calentar el producto hasta
una temperatura deseada.
Mediante una resistencia, regulando el paso de
la corriente eléctrica, la cual se energiza o no a
través de un interruptor, se controla que la
temperatura corresponda con la deseada.
Se dispone de un termostato (es un
componente de un sistema de control que se
encarga de abrir o cerrar un circuito eléctrico
dependiendo de la temperatura) que permite
medir la temperatura, compararla con la
temperatura de referencia y accionar el
interruptor, todo en un solo elemento físico.
El reloj temporizador controla a su vez el
tiempo de cocción y apaga el interruptor una
vez llegado al tiempo programado.
29.
Conclusiones y resumen.
1.En resumen, los sistemas de control automático son fundamentales en la
tecnología moderna, permitiendo el funcionamiento preciso y eficiente
de innumerables dispositivos y procesos en nuestro día a día.
2. Estos sistemas han evolucionado a lo largo de la historia, desde los
primeros reguladores mecánicos hasta los sofisticados sistemas digitales
de hoy en día.
3. Su aplicación abarca desde el control de temperatura en el hogar hasta
la automatización de procesos industriales complejos, mejorando la
productividad, la seguridad y la sostenibilidad.
preencoded.png