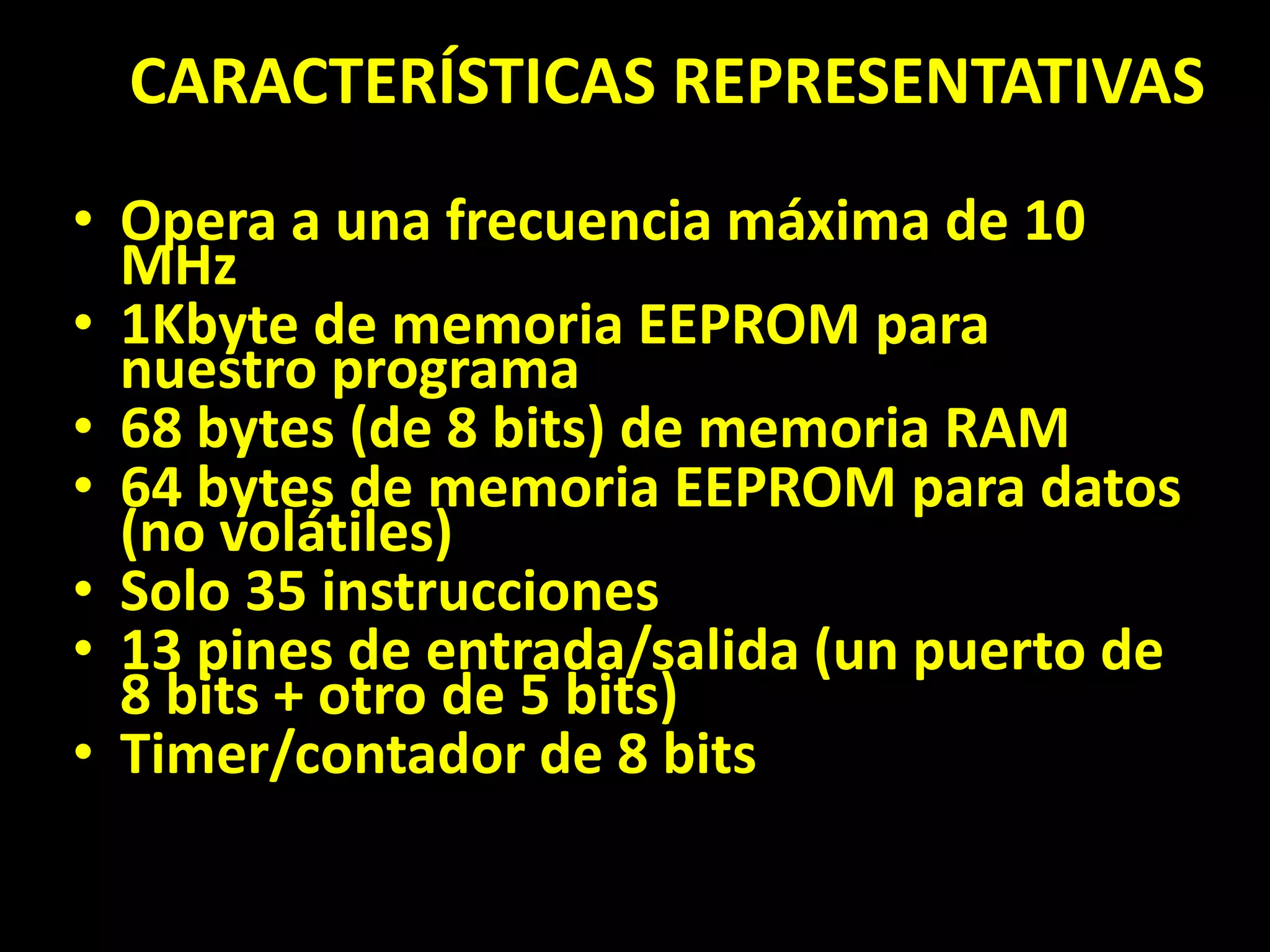
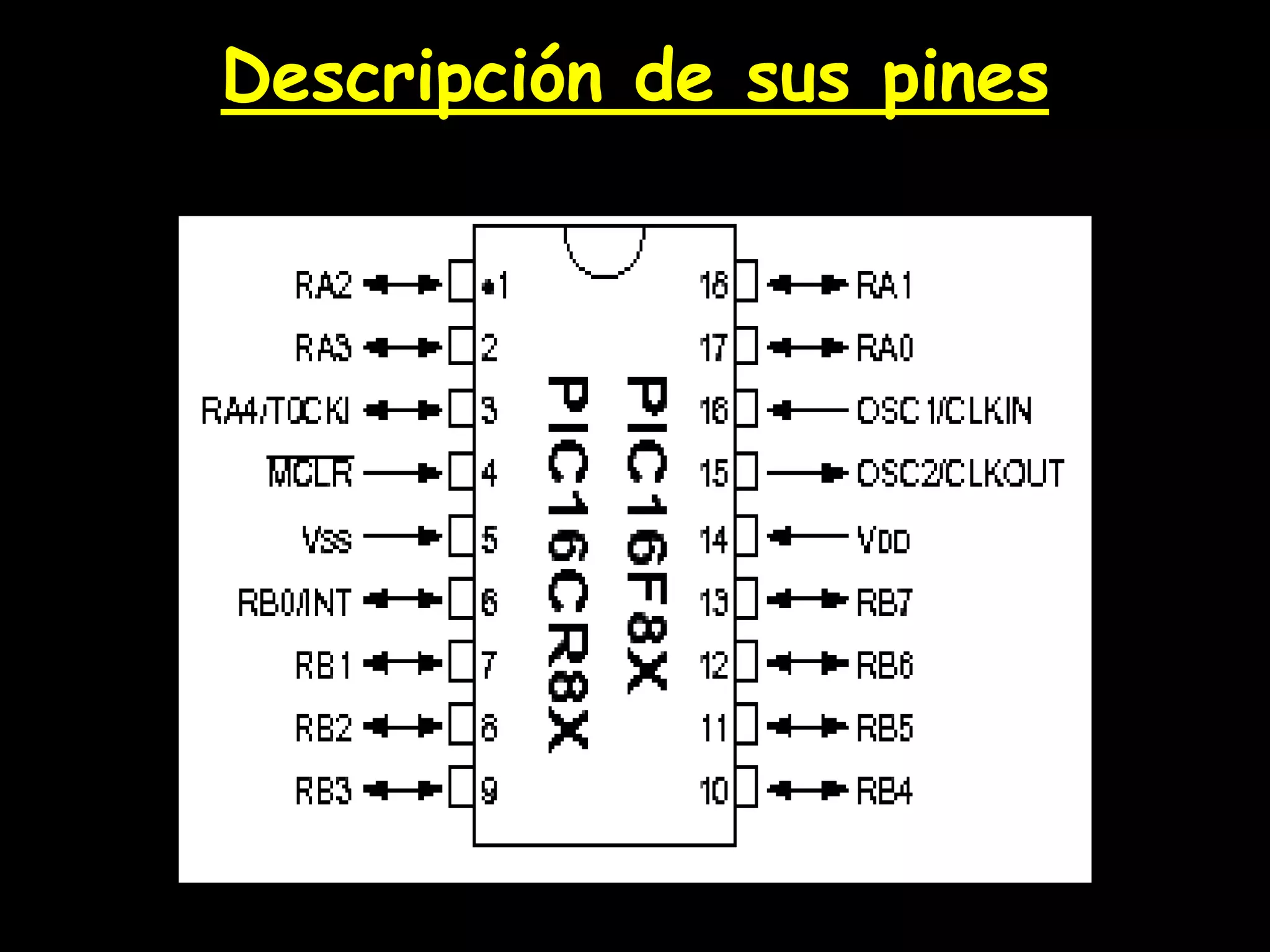
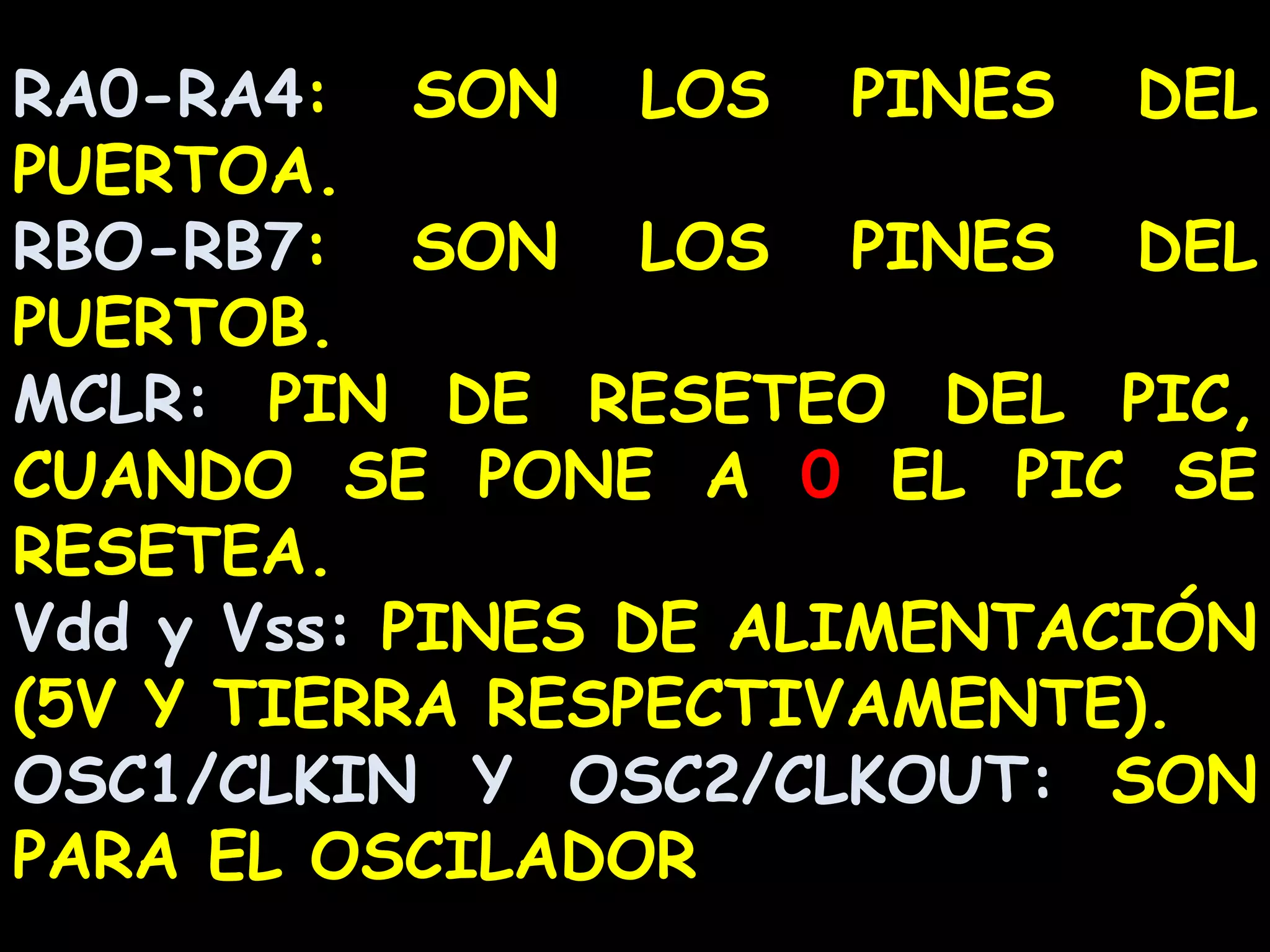
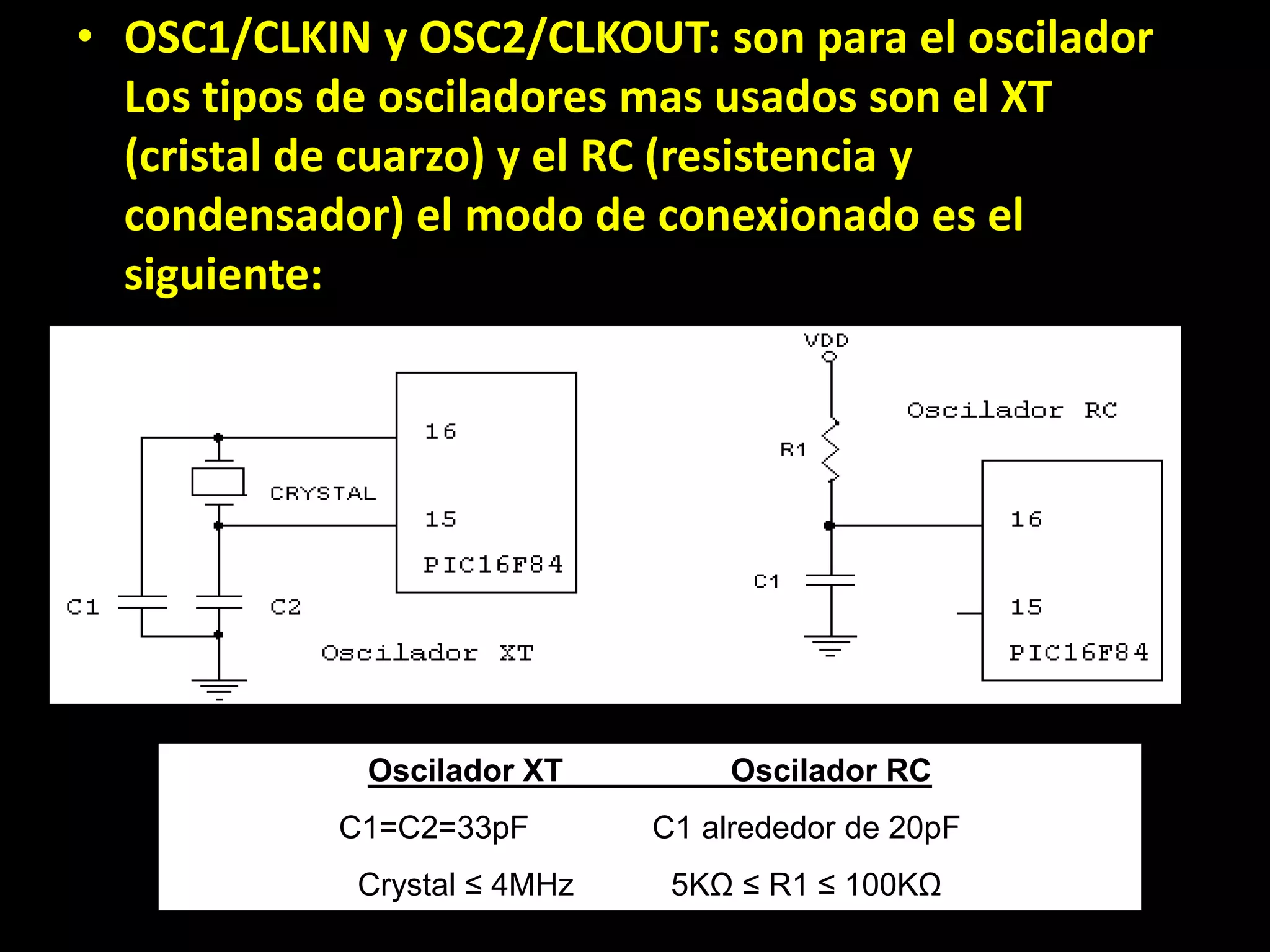
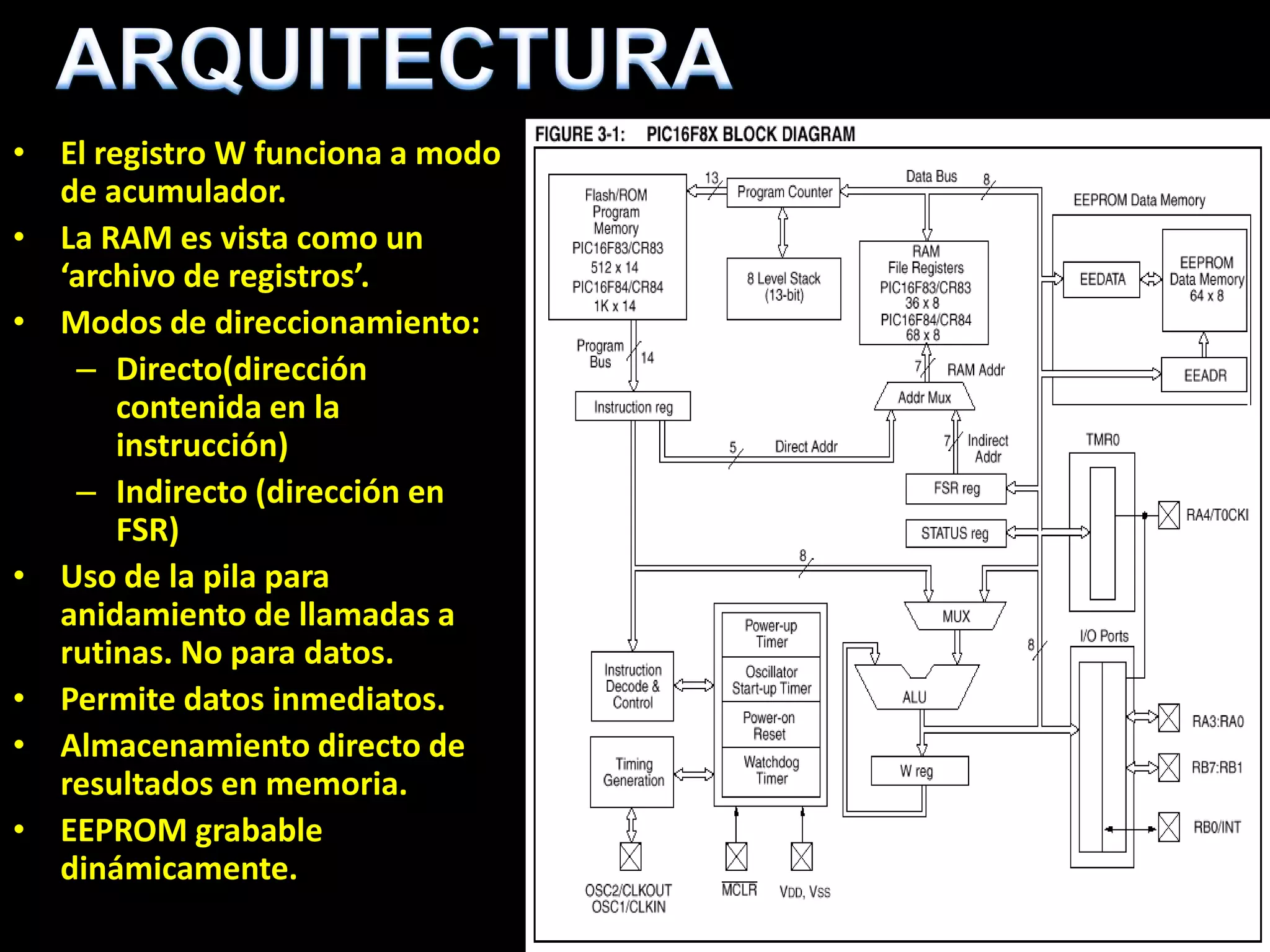
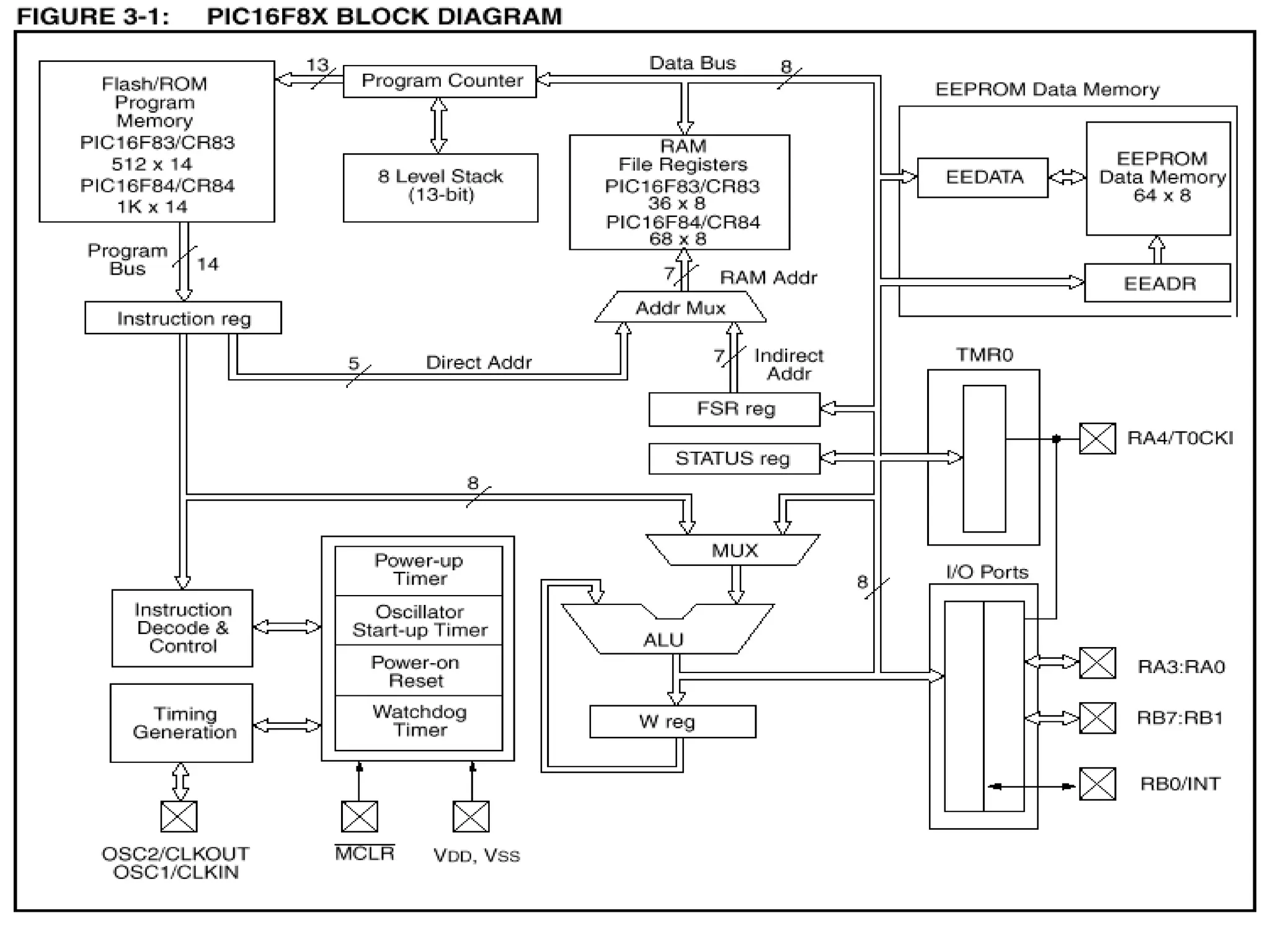
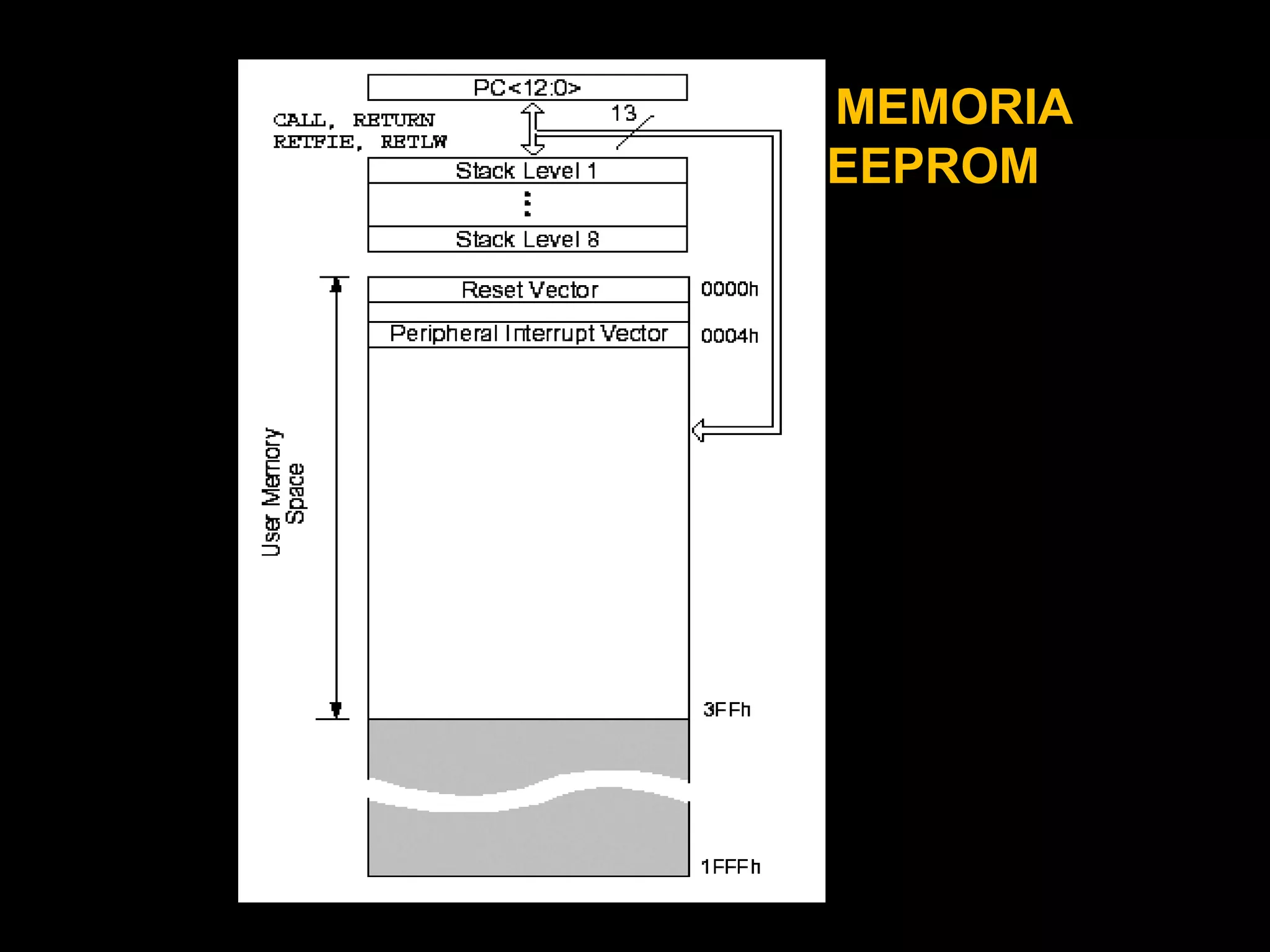
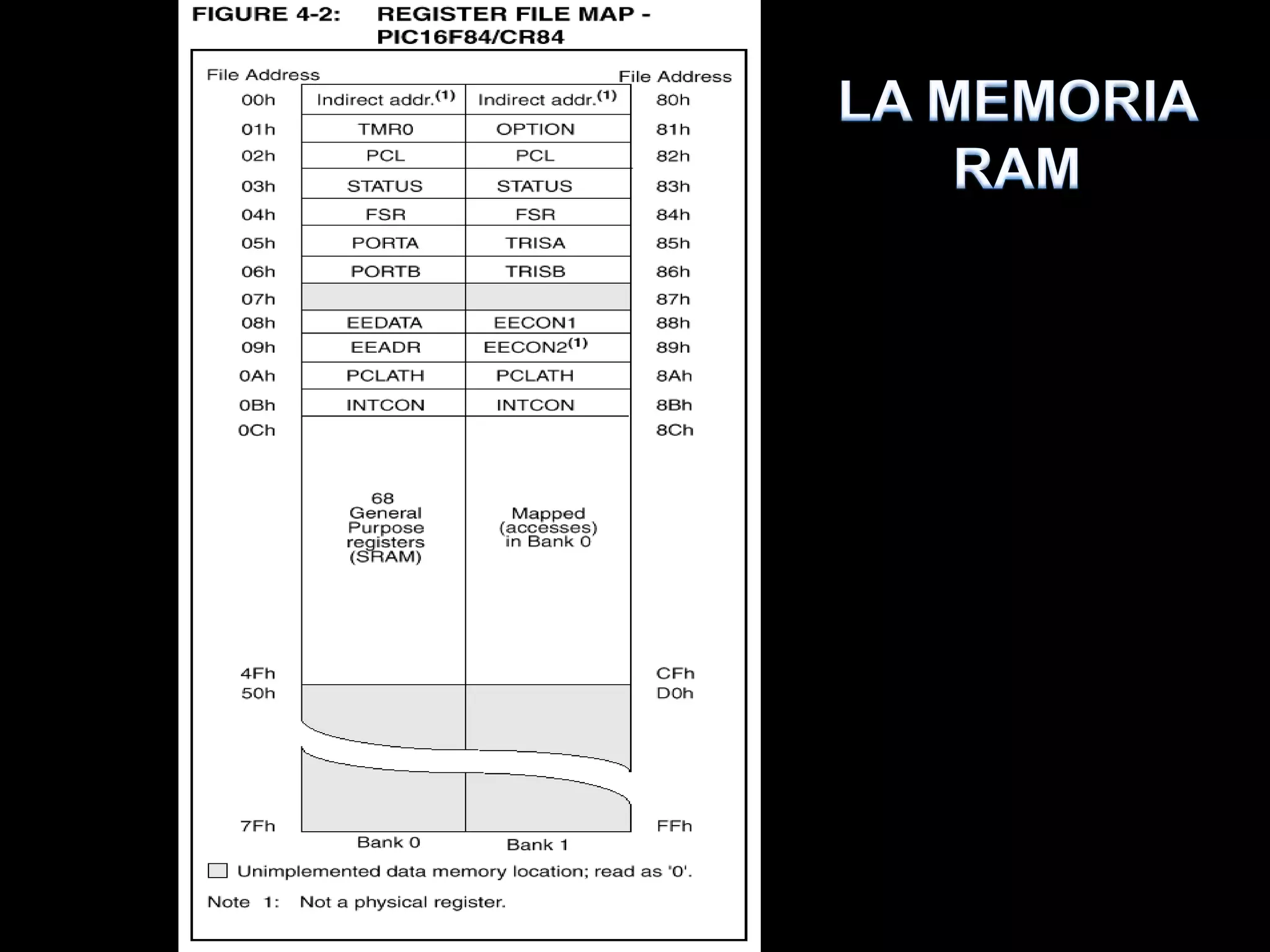
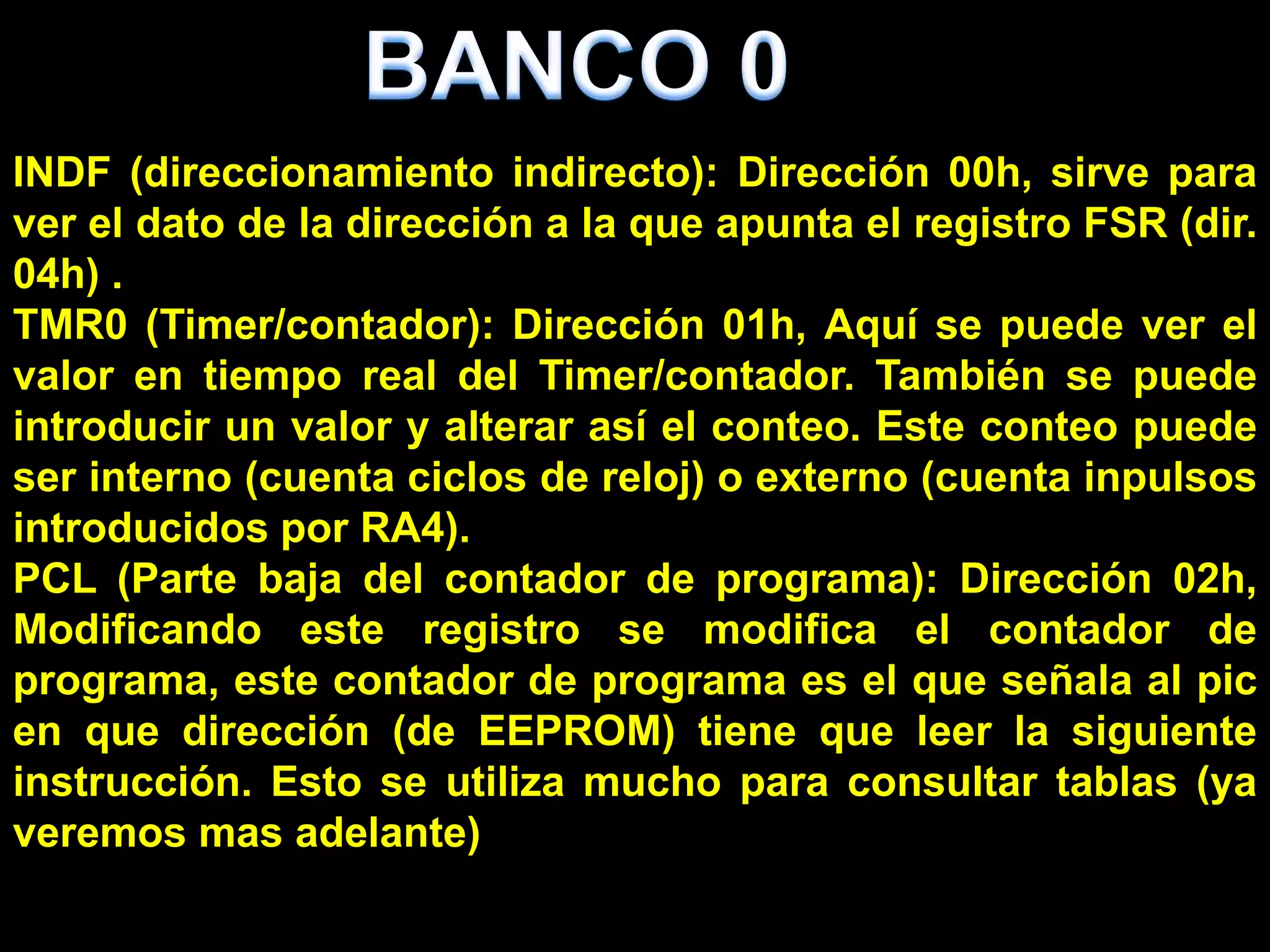
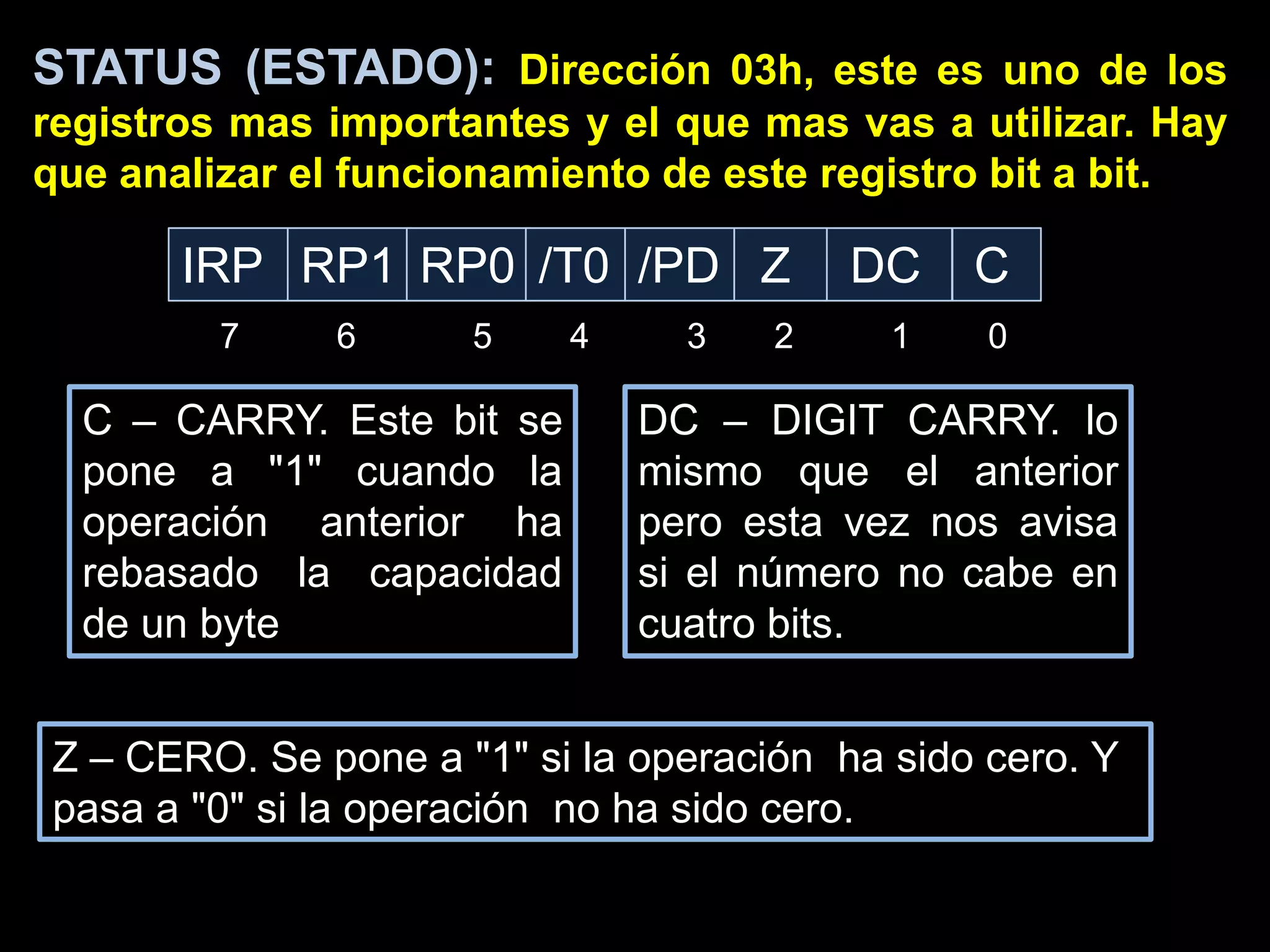
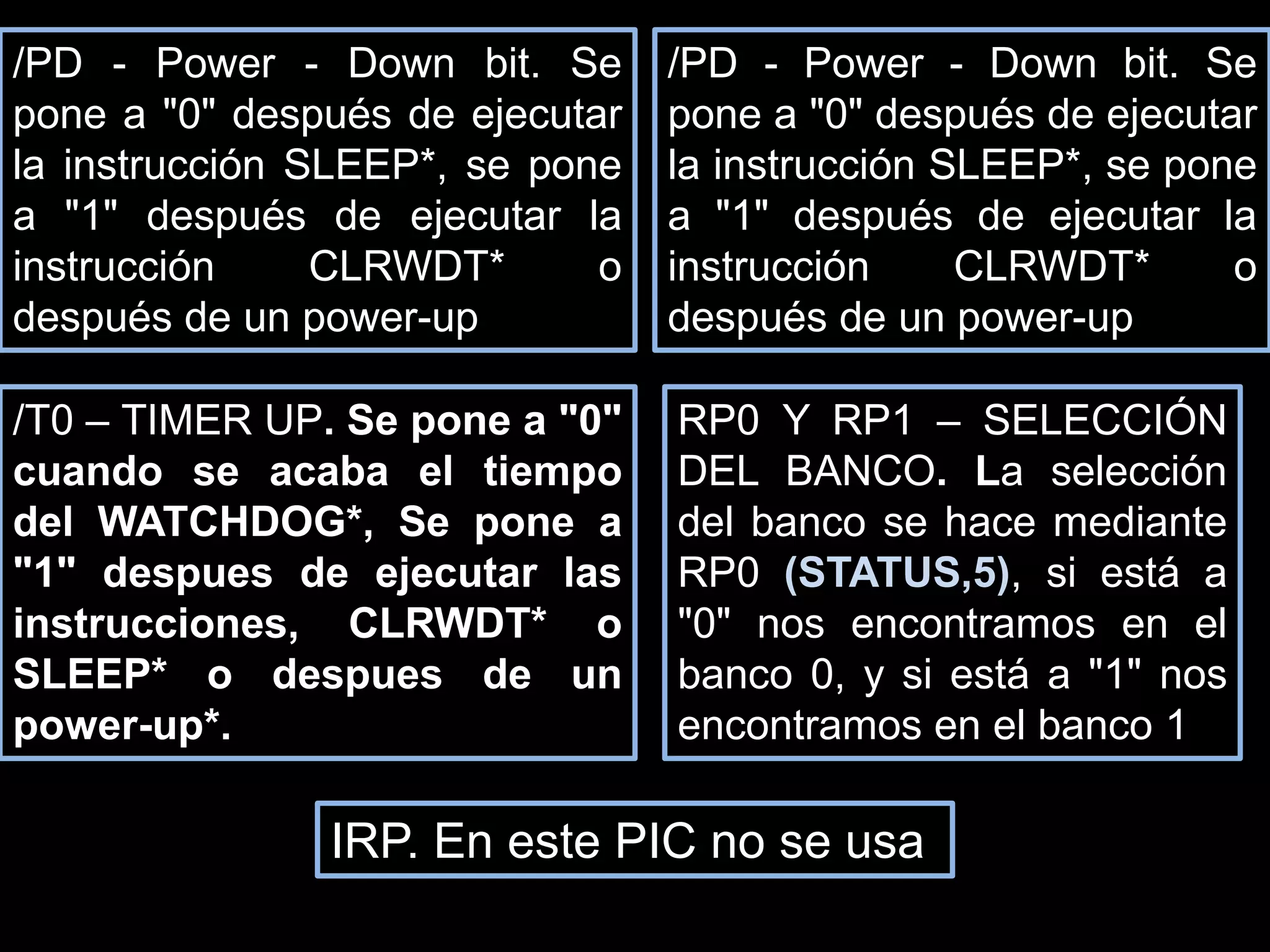
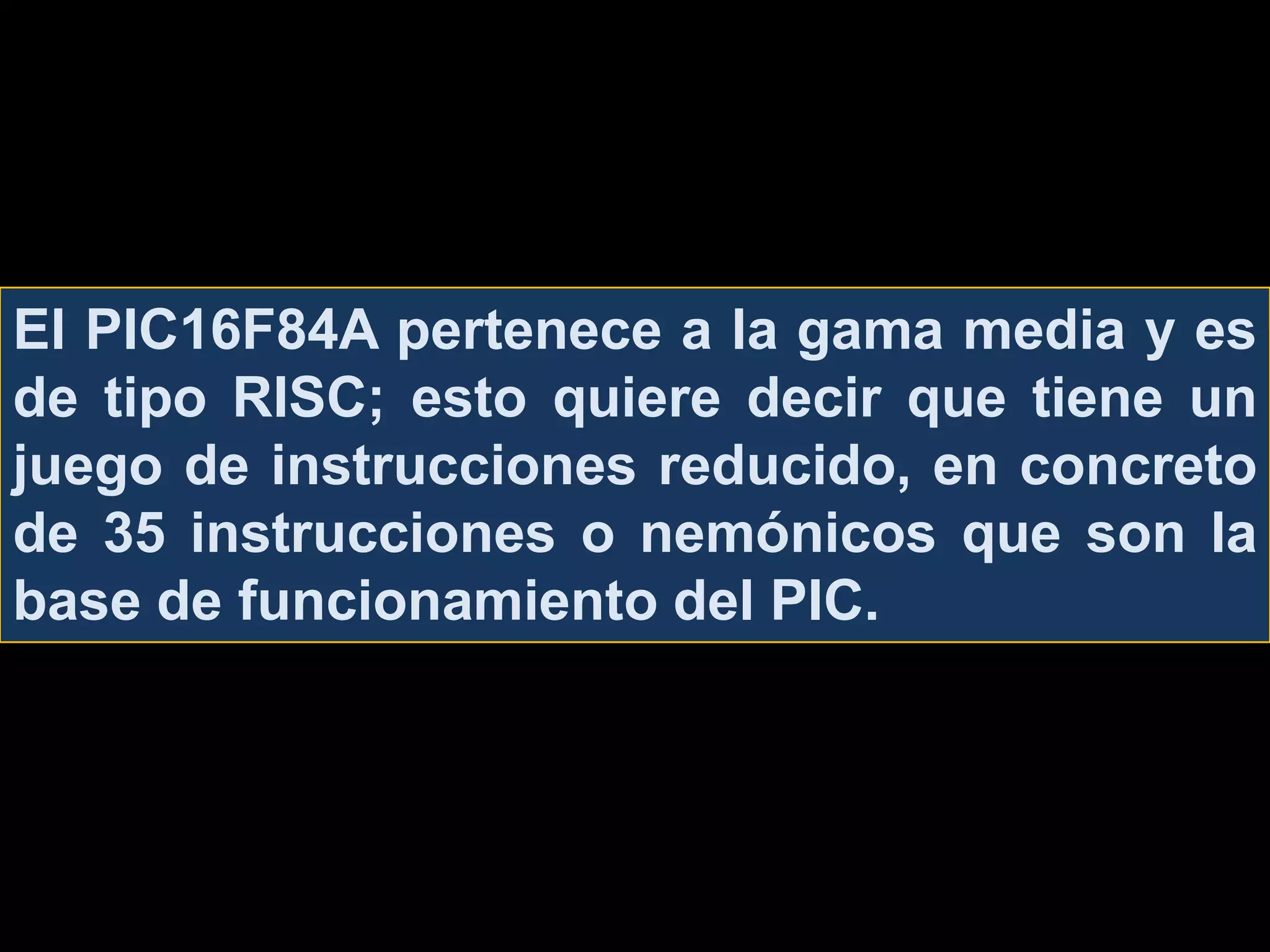
Este documento presenta la unidad de aprendizaje sobre la operación de microcontroladores PIC16F84. Explica la arquitectura básica del PIC16F84, incluyendo sus componentes como la memoria RAM, EEPROM y timer. También describe las características del microcontrolador como su frecuencia máxima de 10 MHz, y el funcionamiento de su memoria y registros internos.