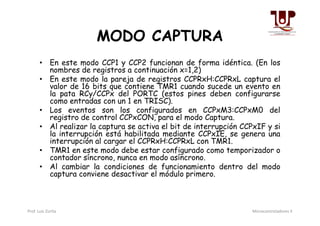
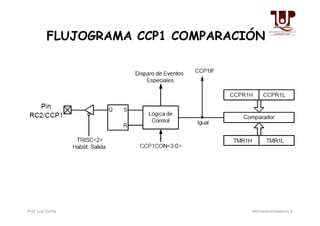
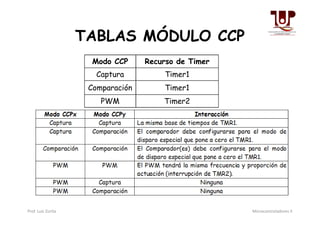
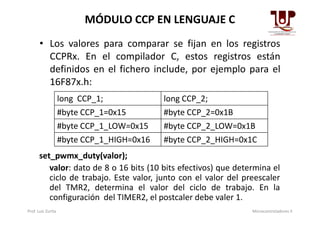
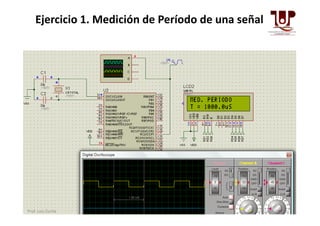
Este documento proporciona información sobre el módulo CCP (Captura/Comparación/PWM) de los microcontroladores. Explica los diferentes modos de funcionamiento del módulo CCP como modo captura, comparación y PWM. Incluye diagramas de flujo y tablas sobre los recursos de timer y registros asociados a cada modo.


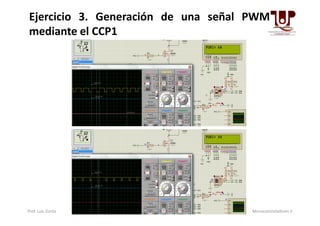
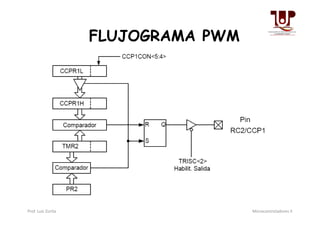
![MODO PWM
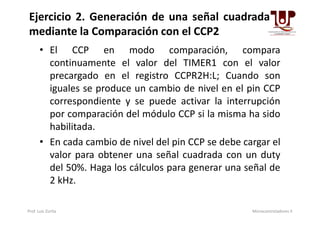
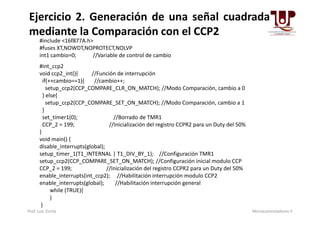
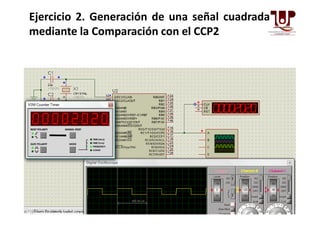
• Con este modo se consiguen impulsos, cuya anchura de nivel alto es de
duración variable y sirven para control de motores y generación de
señales.
• Se utiliza un módulo CCP, el timer2 y un pin RCy/CCPx de salida.
• El comparador entre el valor PR2 y TMR2 cuando detecta la igualdad:
1. Activa ‘1’ el flip-flop de salida.
2. Resetea TMR2.
3. El valor de CCPRxL se carga en CCPRxH.3. El valor de CCPRxL se carga en CCPRxH.
• El periodo de la señal se calcula como:
Periodo=[(PR2)+1]*4*Tosc*(Valor predivisor TMR2)
• Se comparan los valores de 10 bits ([CCPRxH:CCP1CON(5:4)]) y TMR2
concatenados con los dos bits de menor peso del reloj interno) cuando
son iguales:
1. Desactiva ‘0’ el flip-flop de salida.
2. No resetea TMR2
• El ciclo activo es:
Ancho pulso=(CCPRxL:CCP1CON(5:4))*Tosc*(V. predivisor TMR2)
Prof. Luis Zurita Microcontroladores II](https://image.slidesharecdn.com/micro2tema3-130522194809-phpapp02/85/Micro2-tema-3-6-320.jpg)
![SEÑAL PWM
Periodo=[(PR2)+1]*4*Tosc*(Valor predivisor TMR2)
Duty Cycle=(CCPRxL:CCP1CON(5:4))*Tosc*(V. predivisor TMR2)
Prof. Luis Zurita Microcontroladores II](https://image.slidesharecdn.com/micro2tema3-130522194809-phpapp02/85/Micro2-tema-3-22-320.jpg)