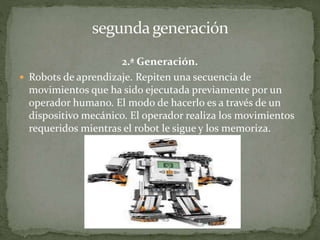
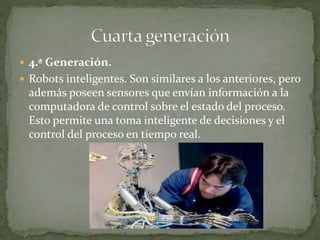
Este documento resume la historia y evolución de los robots. Comenzó con la creación de artefactos mecánicos para aliviar el trabajo humano, y el término "robot" fue acuñado en 1921 para referirse a máquinas que realizan tareas forzadas. Los robots han pasado por cuatro generaciones, desde manipuladores mecánicos simples hasta robots inteligentes que usan sensores para tomar decisiones en tiempo real y controlar procesos de manera flexible.
![ La historia de la robótica va unida a la construcción de "artefactos", que
trataban de materializar el deseo humano de crear seres a su semejanza
y que lo descargasen del trabajo. El ingeniero español Leonardo Torres
Quevedo (que construyó el primer mando a distancia para su automóvil
mediante telegrafía sin hilo,[cita requerida] el ajedrecista automático,
el primer transbordador aéreo y otros muchos ingenios) acuñó el
término "automática" en relación con la teoría de la automatización de
tareas tradicionalmente asociadas.](https://image.slidesharecdn.com/larobticanicolas11-1-160302130953/85/La-robotica-nicolas-11-1-3-320.jpg)