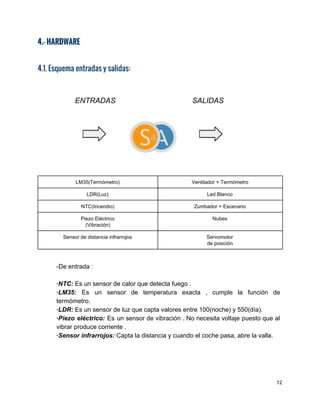
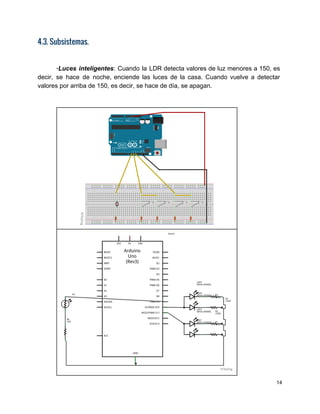
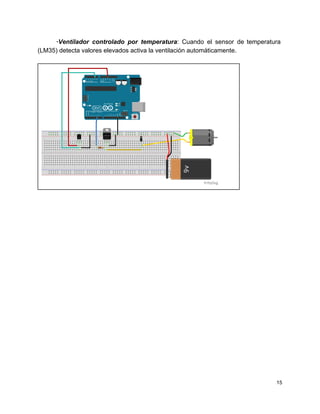
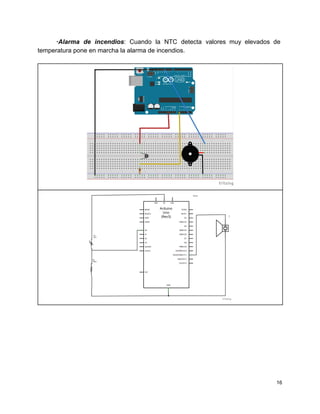
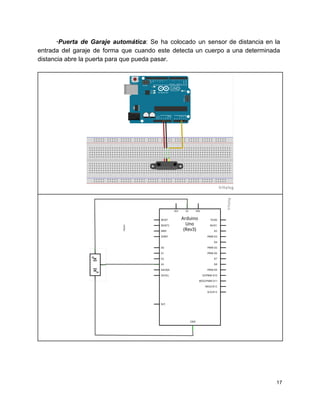
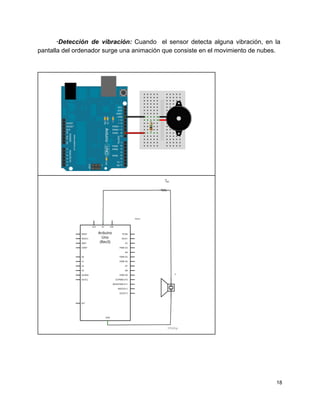
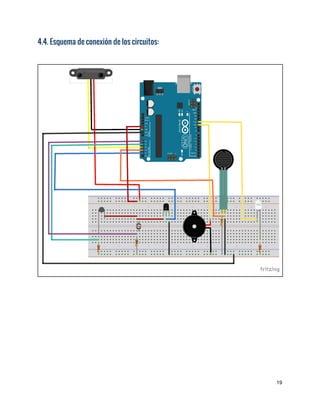
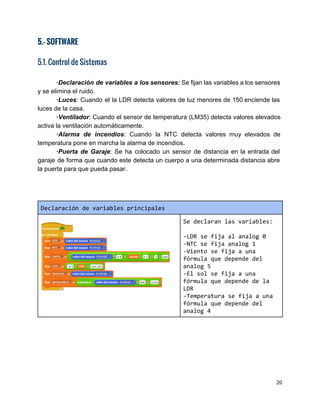
Este documento describe el diseño y desarrollo de una casa inteligente automatizada. Se detalla el uso de sensores como LM35, LDR, NTC e infrarrojos para medir temperatura, luz, incendios y distancia respectivamente. Los actuadores incluyen LEDs, zumbador, servomotor y ventilador. El software controla los subsistemas de luces inteligentes, ventilación, alarma de incendios y puerta de garaje automática en función de los datos de los sensores. El proyecto tiene como objetivo crear una casa que se autorregule sin























![Expediente tecnico-de-modulo-basico-de-adobe-reforzado-con-geomalla[1]](https://cdn.slidesharecdn.com/ss_thumbnails/expediente-tecnico-de-modulo-basico-de-adobe-reforzado-con-geomalla1-120703162346-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)

































































