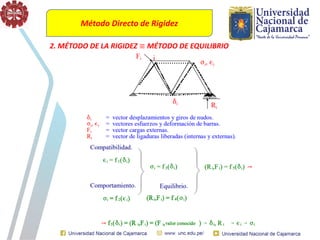
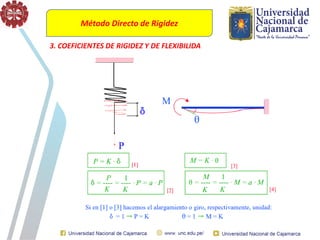
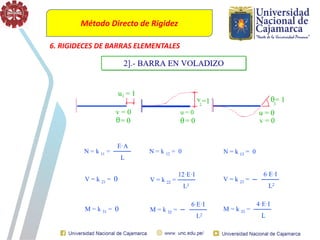
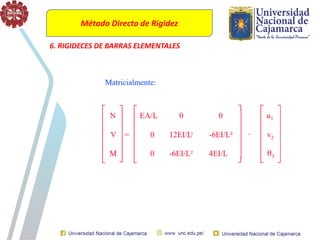
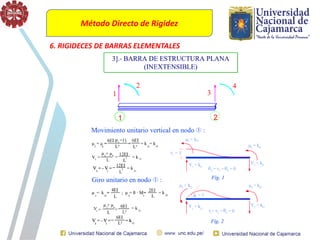
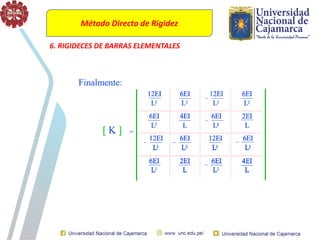
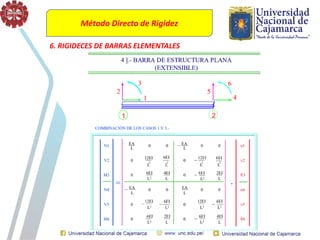
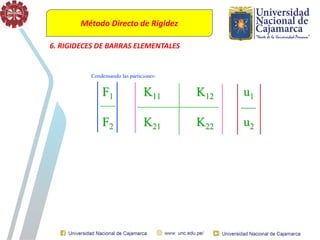
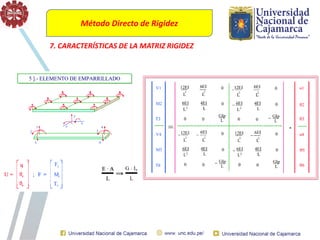
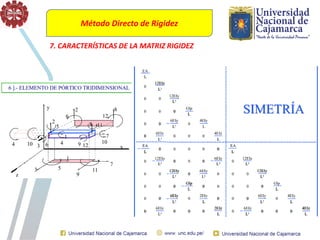
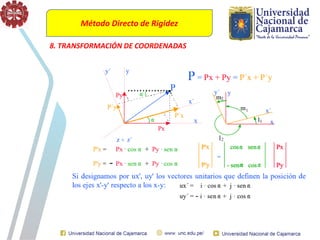
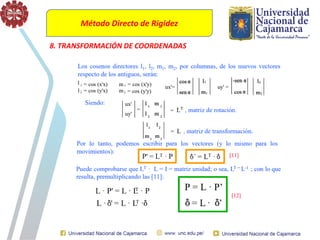
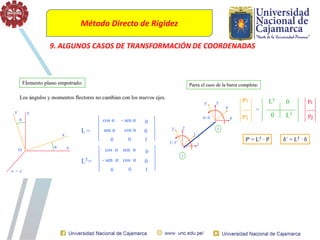
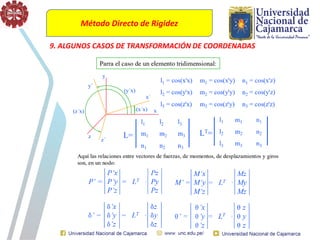
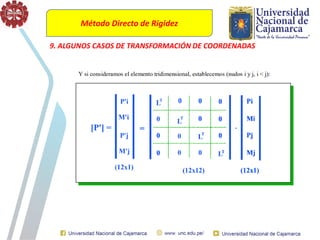
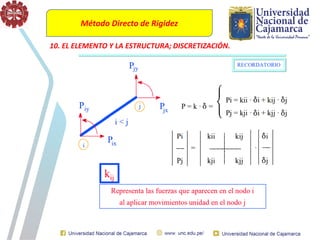
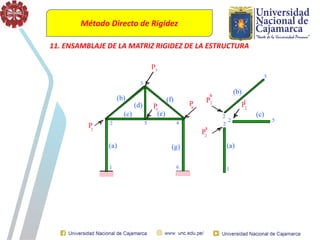
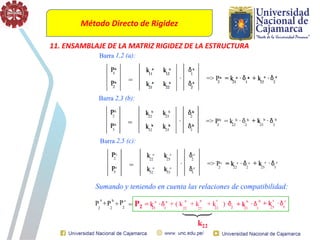
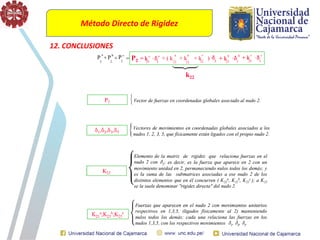
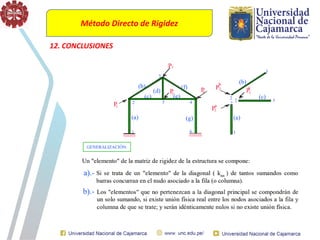
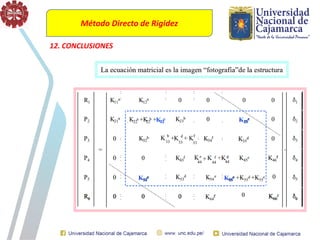
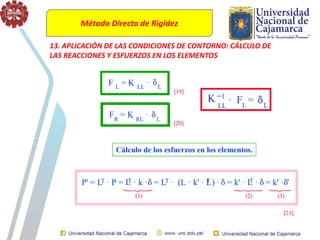
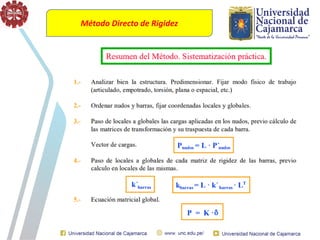
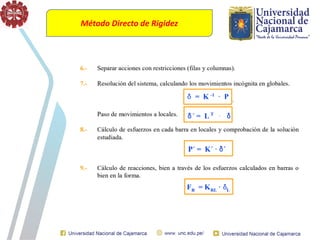
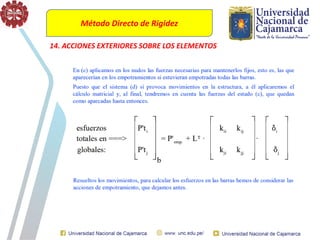
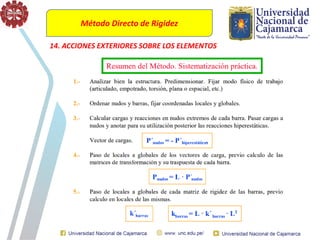
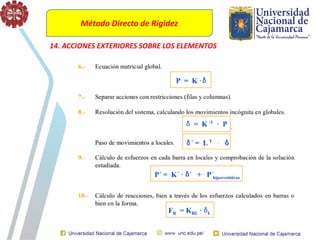
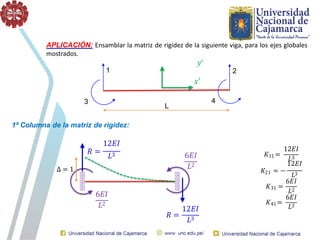
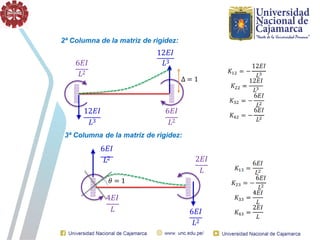
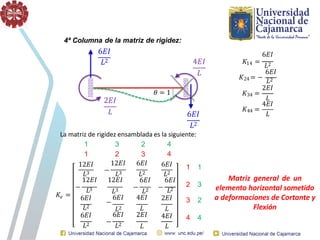
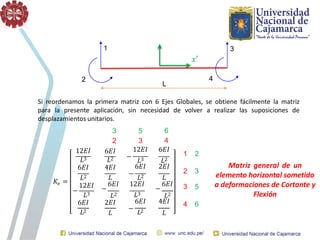
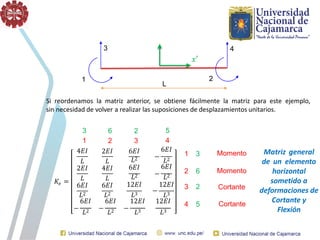
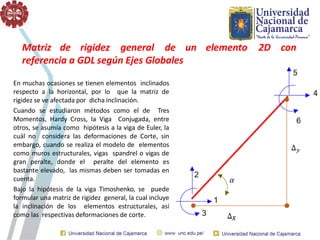
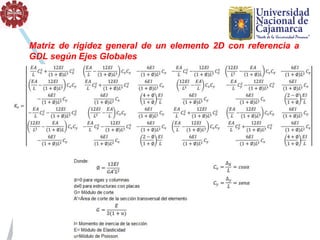
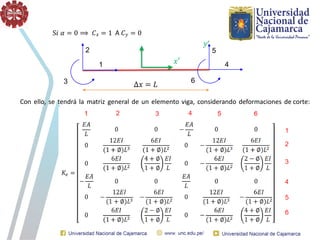
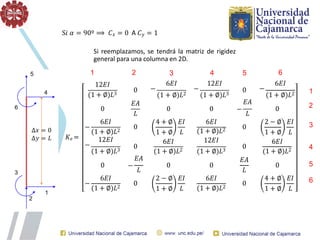
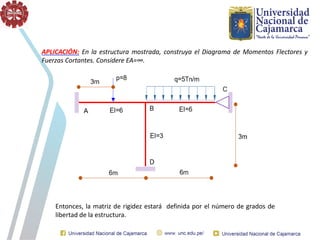
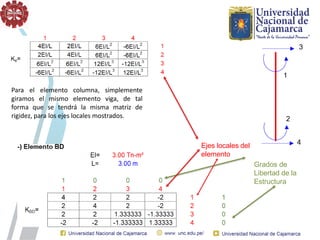
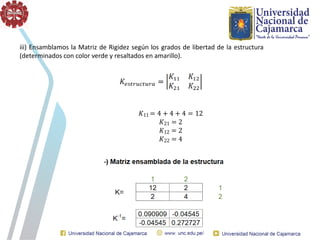
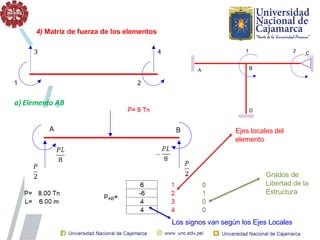
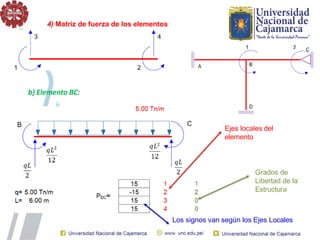
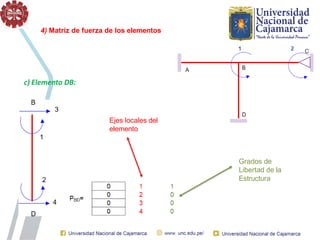
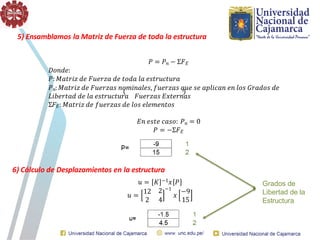
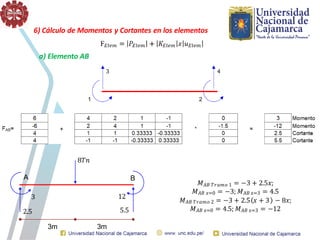
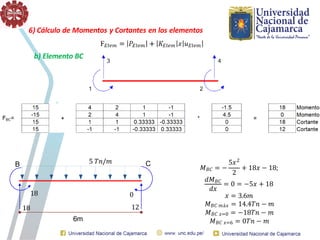
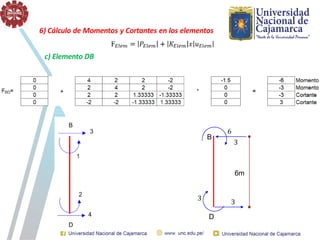
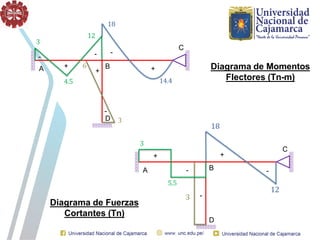
El documento describe el método directo de rigidez, detallando componentes fundamentales como ecuaciones de equilibrio, compatibilidad de movimientos y leyes de comportamiento estructural. Se presentan coeficientes de rigidez, sistemas de coordenadas, ensamblaje de matrices, y aplicaciones prácticas de cálculo de reacciones y esfuerzos en elementos estructurales. También se discuten pasos para calcular momentos y cortantes en estructuras, junto con ejemplos numéricos.