Descargar como PPS, PPTX

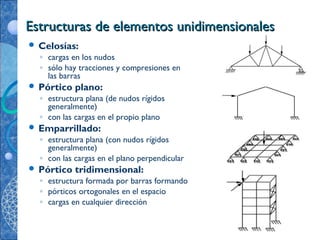













![Matrices de rigidez elementalesMatrices de rigidez elementales [k][k] de est. planasde est. planas
ELEMENTO ESQUEMA MATRIZ DE RIGIDEZ COMENTARIOS
ELEMENTO DE
CELOSÍA PLANA
Se obvian los grados de
libertad de giro. Los g.d.l.
perpendiculares a la barra
deben permanecer para
poder hacer posteriores
cambios en la
inclinación del elemento.
ELEMENTO DE
PÓRTICO PLANO
Será una matriz de 6x6 al
considerar 3 g.d.l. por cada
nodo.
ELEMENTO DE VIGA
CONTINUA SIN
CARGA AXIAL
Coincide con la matriz
anterior eliminando las filas y
columnas de los grados de
libertad axiales.
(1ª y 4ª fila y columna)
1 0 1 0
0 0 0 0
k
1 0 1 0
0 0 0 0
EA
L
−
=
−
EA
L
sim0
12EI
L
3
0
6EI
L2
4EI
L
−EA
L
0 0
EA
L
0
−12 EI
L3
−6EI
L2
0
12 EI
L3
0
6EI
L
2
2EI
L
0
−6EI
L
2
4EI
L
K =
K =
12EI
L3
6EI
L2
4EI
L
sim
12EI
L3
−6EI
L2
12EI
L3
6EI
L
2
2EI
L
−6EI
L
2
4EI
L](https://image.slidesharecdn.com/5-140404164115-phpapp01/85/5-matricial-16-320.jpg)


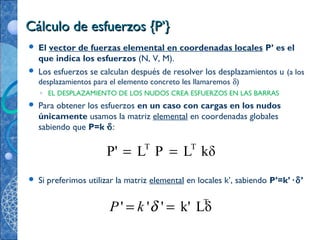
![Matriz de cambio de baseMatriz de cambio de base [R][R]
Así, la matriz para cambiar un vector de coordenadas locales a
globales es:
Que tiene la propiedad R·RT
=I o R-1
=RT
Por tanto: P’=RT
·P y P=R·P’ siendo
Para cambiar de globales a locales vectores correspondientes
a un elemento de un pórtico plano con dos nudos i, j:
cos
cos
sen
R
sen
α α
α α
−
=
i i
j j
i i
j j
T
T
T
T
R 0P' P
'
P' P0 R
R 0'
'
' 0 R
T
T
P L P
y
L
δ δ
δ δ
δ δ
= ⇒ =
= ⇒ =
](https://image.slidesharecdn.com/5-140404164115-phpapp01/85/5-matricial-19-320.jpg)
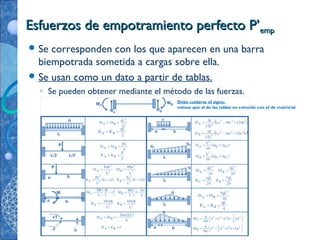
![Matriz de cambio de baseMatriz de cambio de base [L][L]
la matriz LT
debe considerar el grado de libertad del giro.
La transformación de coordenadas de la matriz de rigidez se deduce
de:
Como en coordenadas globales debe cumplirse que P=k· ,δ
entonces: k=Lk’Lk=Lk’LTT
Se cumple que LT
=L-1
T
cos 0 0 0 0
cos 0 0 0 0
0 0 1 0 0 0
L
0 0 0 cos 0
0 0 0 cos 0
0 0 0 0 0 1
sen
sen
sen
sen
α α
α α
α α
α α
−
=
−
( )P ' ' ' ' 'T T T
k L P k L P Lk Lδ δ δ= ⇒ = ⇒ =
Ley de Hooke para el elemento en
coordenadas locales
cos 0 0 0 0
cos 0 0 0 0
0 0 1 0 0 0
L
0 0 0 cos 0
0 0 0 cos 0
0 0 0 0 0 1
sen
sen
sen
sen
α α
α α
α α
α α
−
=
−
](https://image.slidesharecdn.com/5-140404164115-phpapp01/85/5-matricial-20-320.jpg)
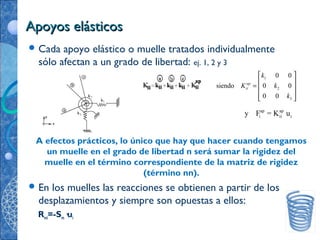
![Ensamblaje de la matriz de rigidez [K]Ensamblaje de la matriz de rigidez [K]
Numerar los grados de libertad de la estructura total.
Obtener las matrices k en c. globales para cada barra
kI=LkI’LT
kII=LkII’LT
Ensamblar todas las matrices de rigidez en una sola matriz global. Los nudos
comunes a varias barras tendrán varios términos de rigidez kij en sus g.d.l. que deben sumarse.
Las zonas sin términos se rellenan con ceros.
1
2
3
4
5
6
7
8
9
II
IEjemplo:
9 g.d.l (3 por nodo) al ser estructura plana con nudos rígidos.
cos 0 0 0 0
cos 0 0 0 0
0 0 1 0 0 0
L
0 0 0 cos 0
0 0 0 cos 0
0 0 0 0 0 1
sen
sen
sen
sen
α α
α α
α α
α α
−
=
−
En esta zona
se suman
los términos
1
2
3
4
5
6
7
8
9
1 2 3 4 5 6 7 8 9
KI
KII
0
0
1
2
3
4
5
6
7
8
9
II
I
4
5
6
KII
KI](https://image.slidesharecdn.com/5-140404164115-phpapp01/85/5-matricial-21-320.jpg)









Este documento describe los métodos matriciales para el análisis de estructuras de elementos unidimensionales. Explica los conceptos clave como los grados de libertad, las matrices de rigidez y flexibilidad, y cómo se pueden modelar diferentes tipos de estructuras como pórticos, celosías y emparrillados usando este enfoque. También cubre temas como la discretización, los sistemas de referencia global y local, y cómo se definen y calculan los términos de las matrices de rigidez elementales.























































































