Descargar para leer sin conexión
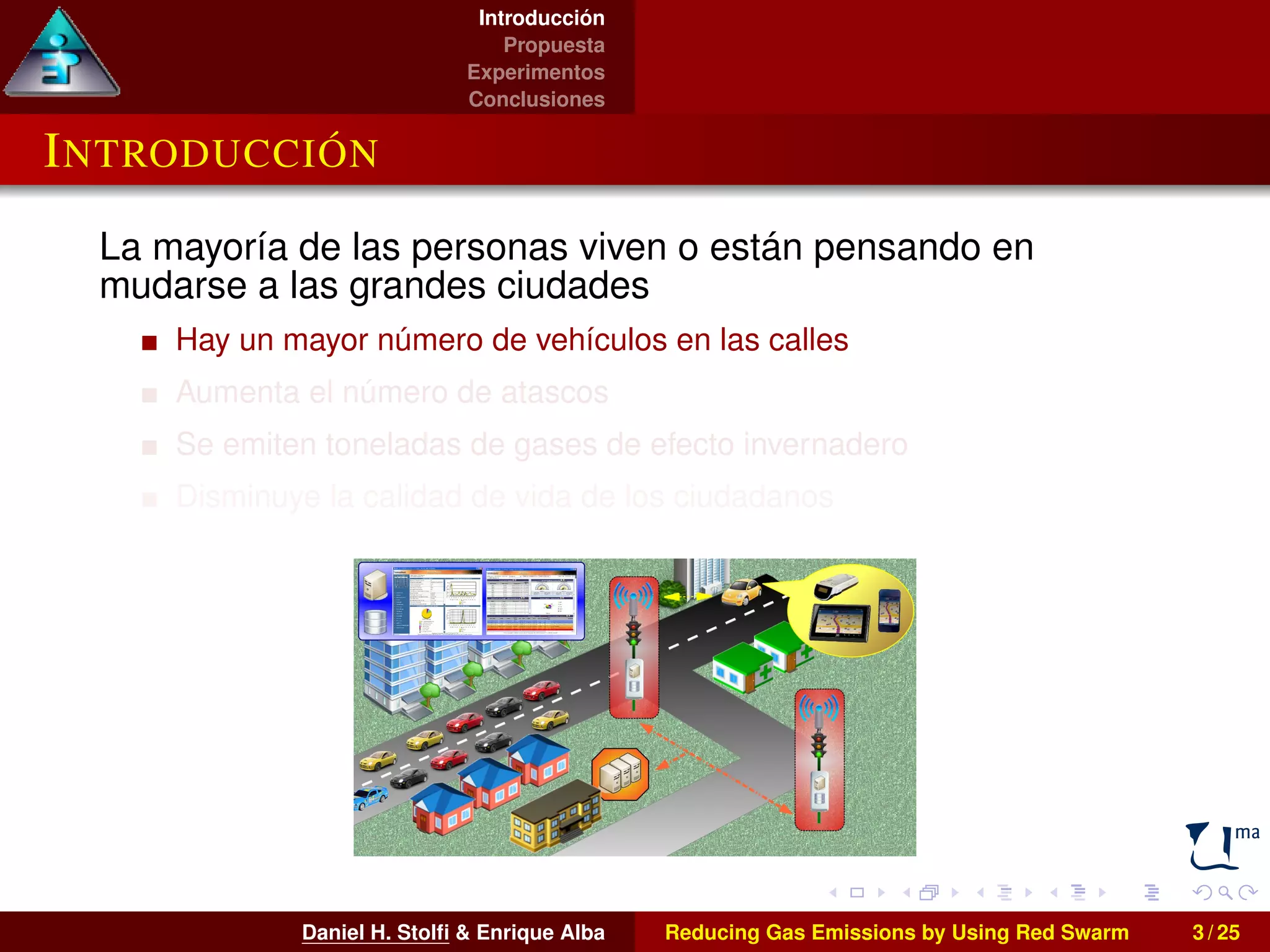
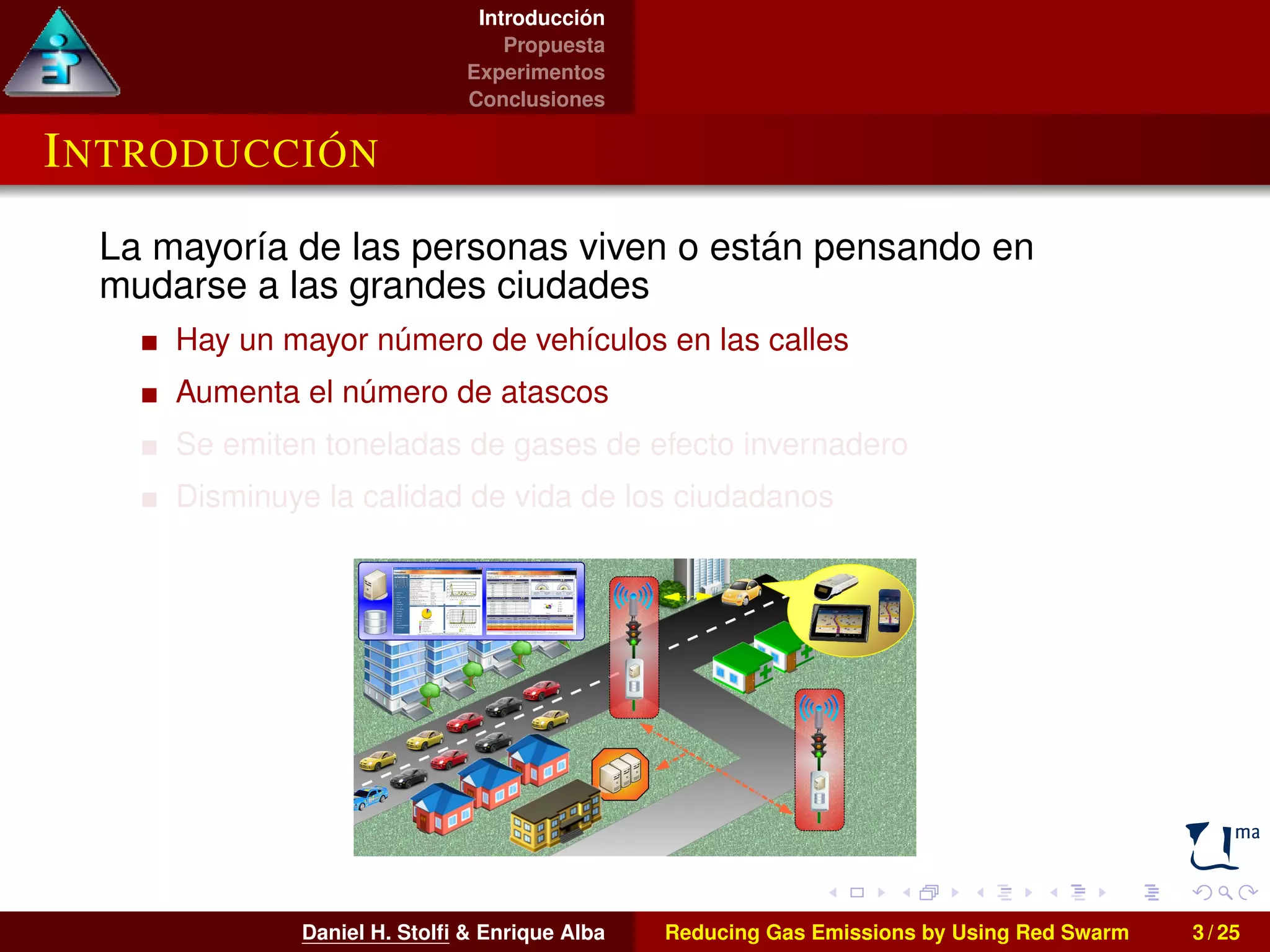
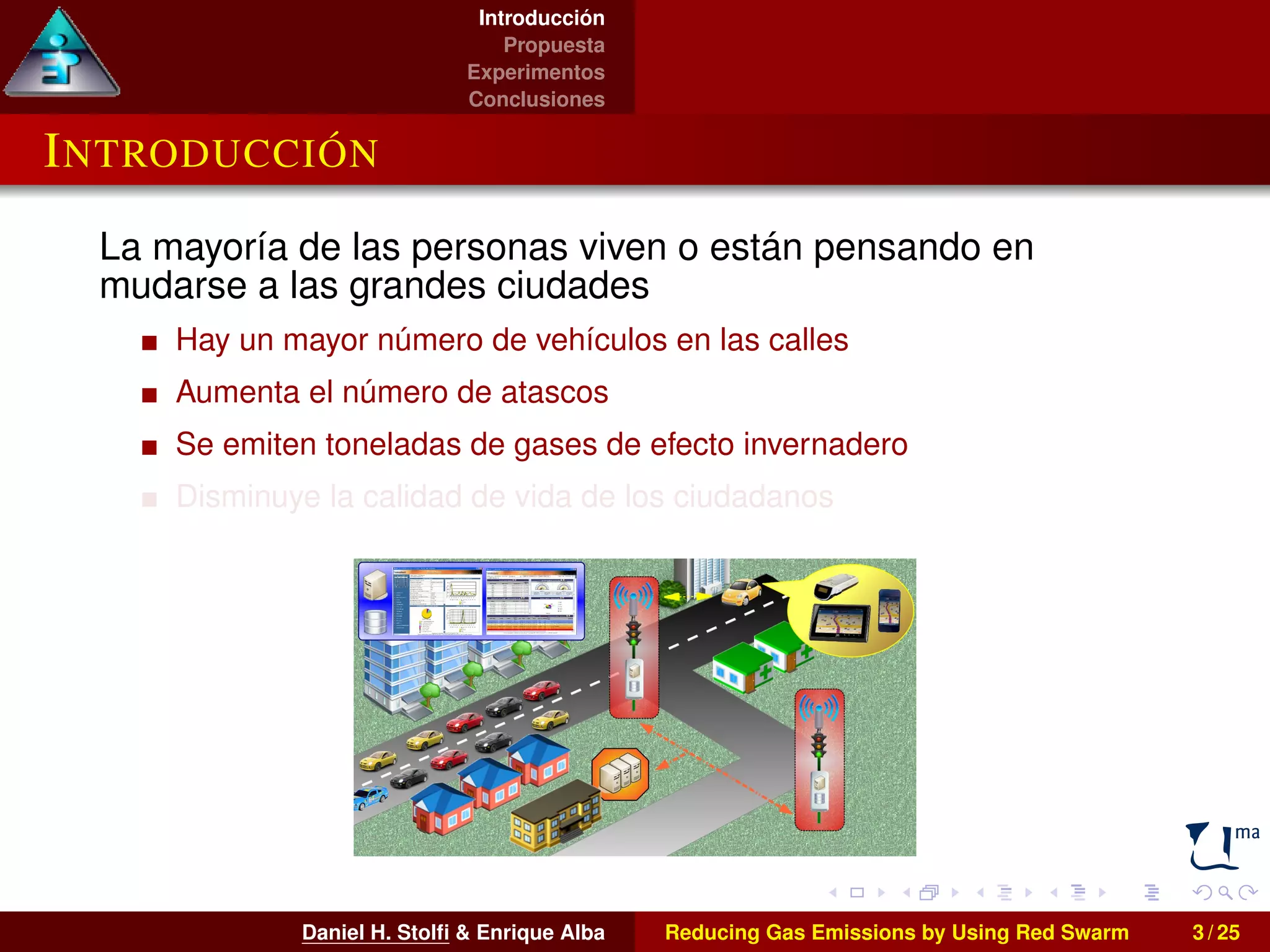
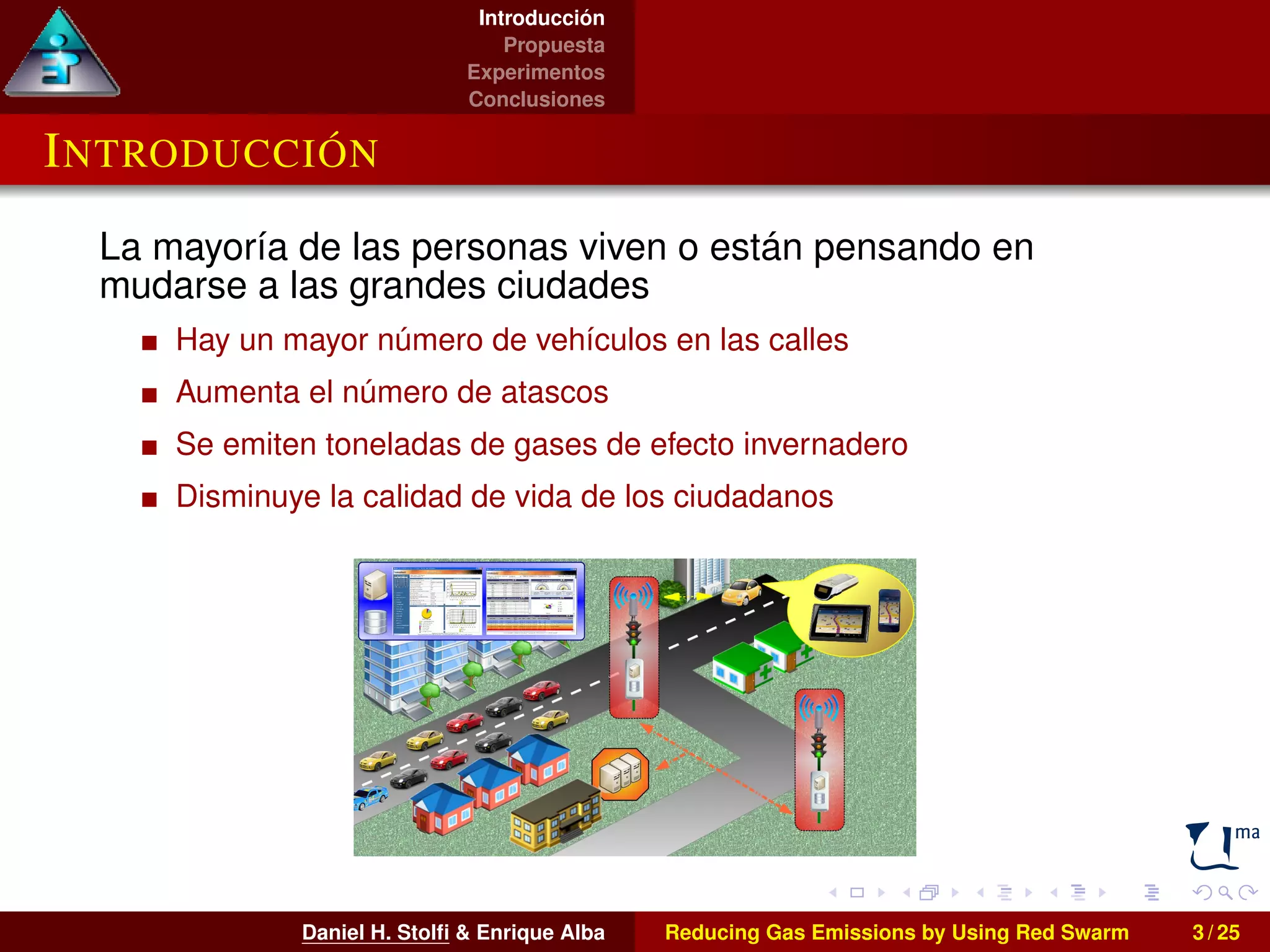
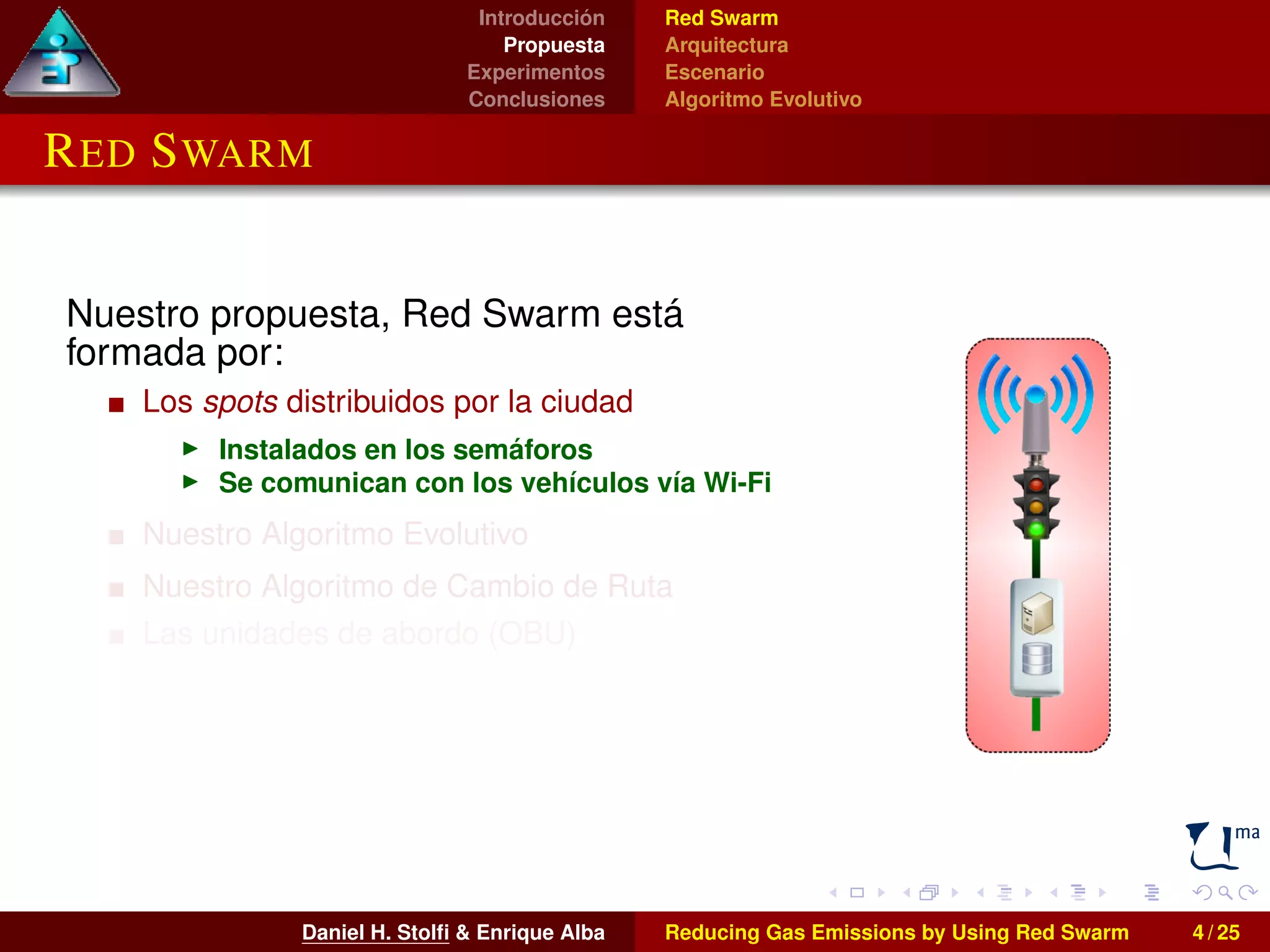
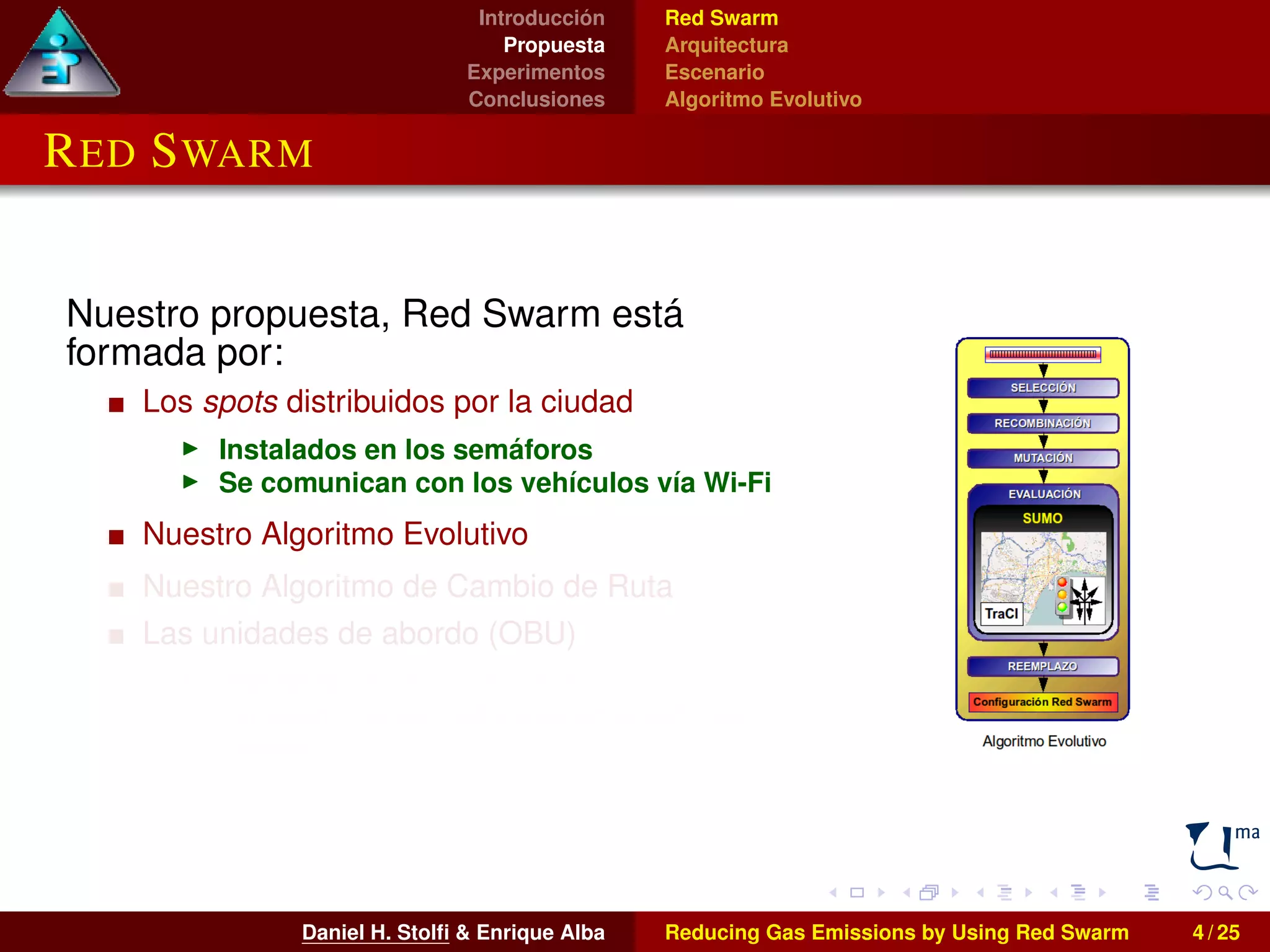
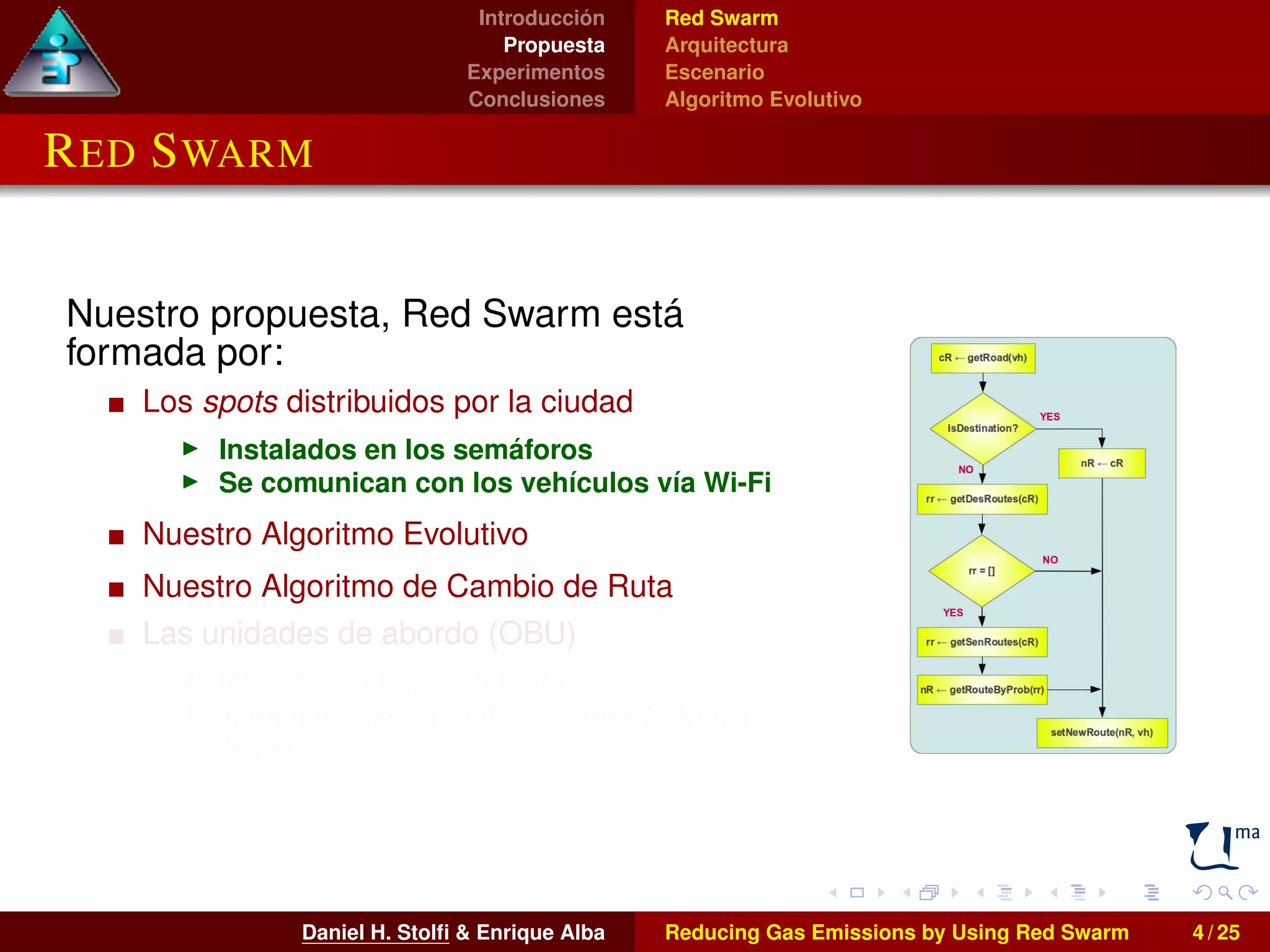
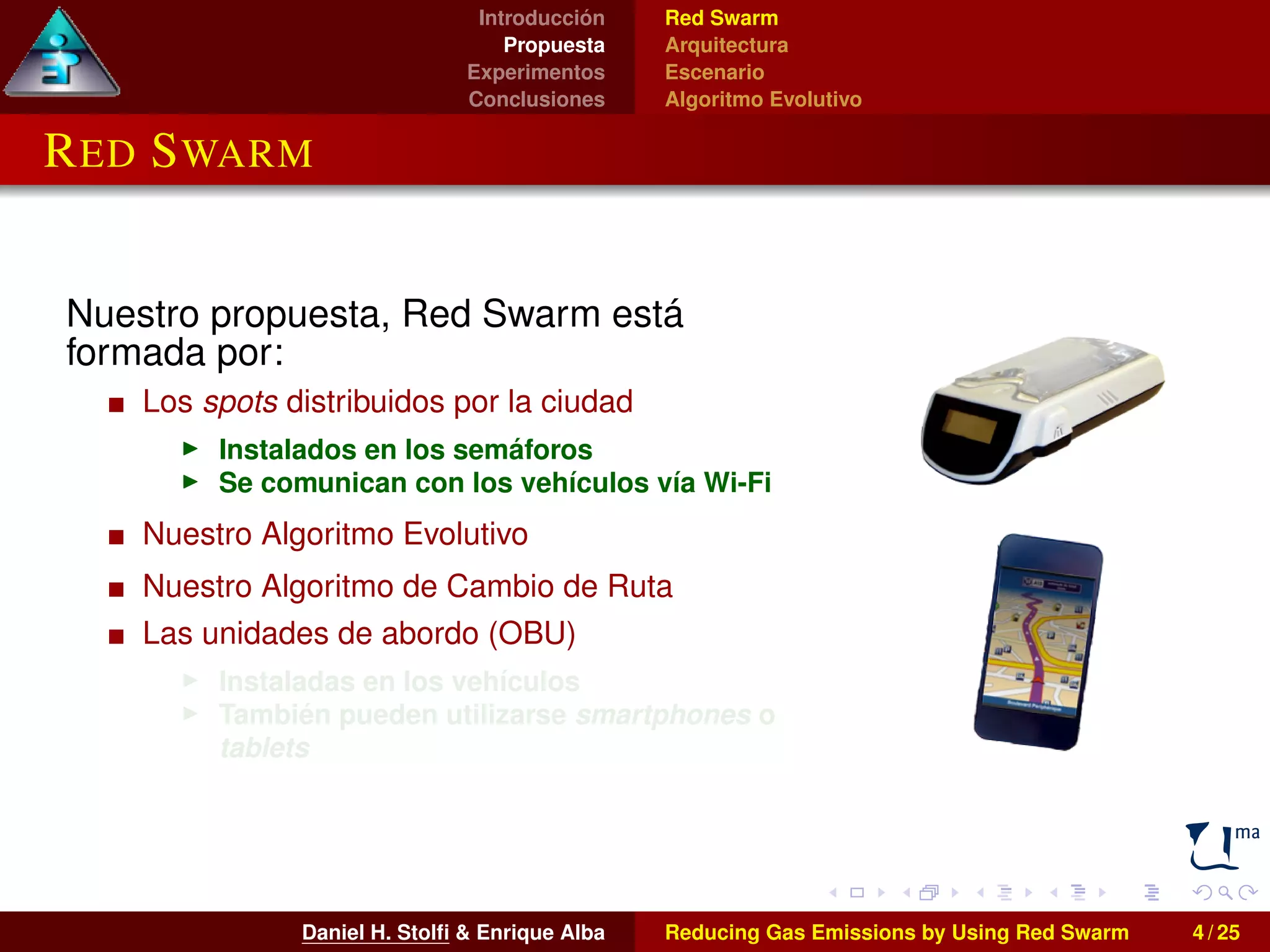
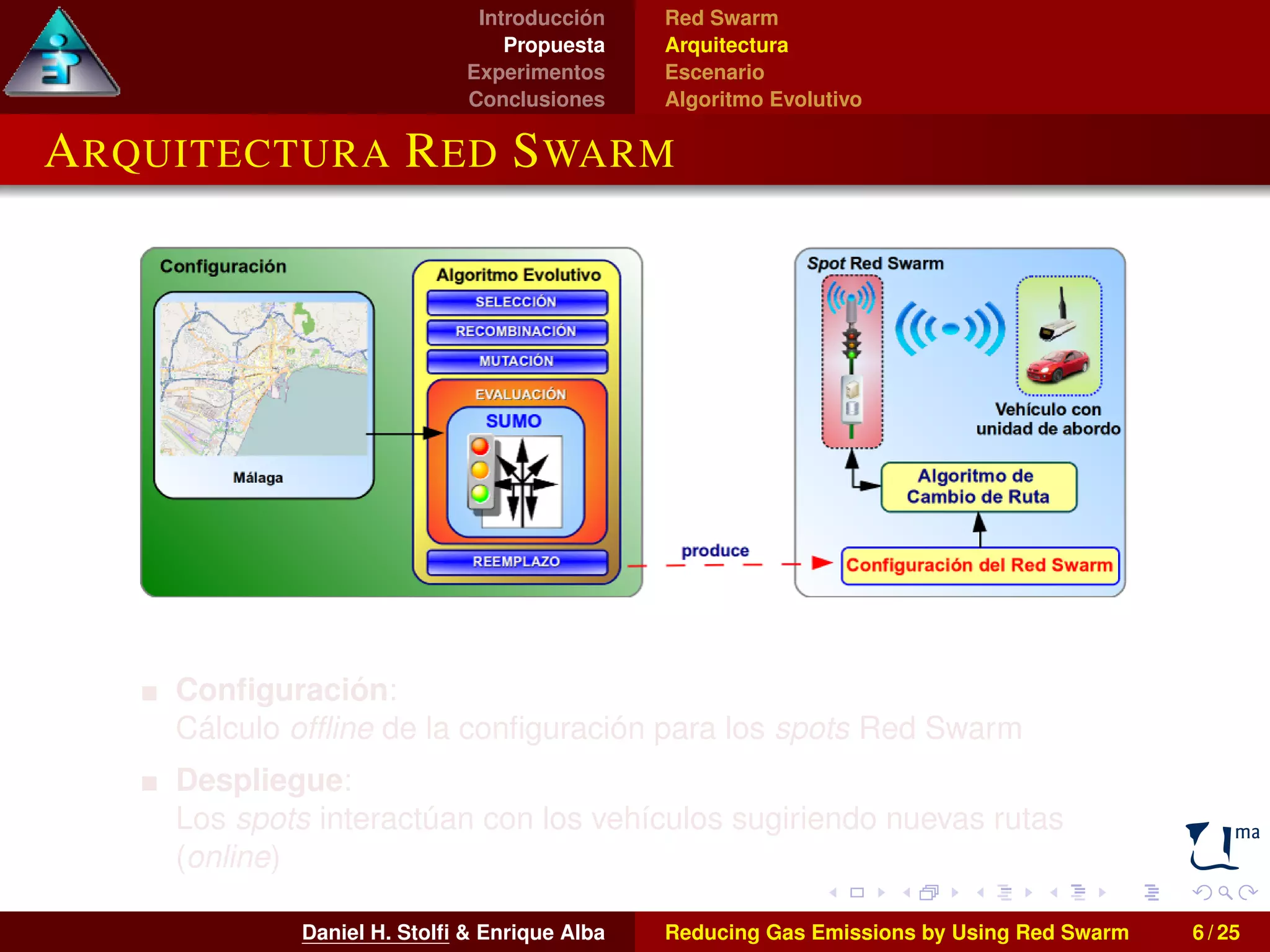

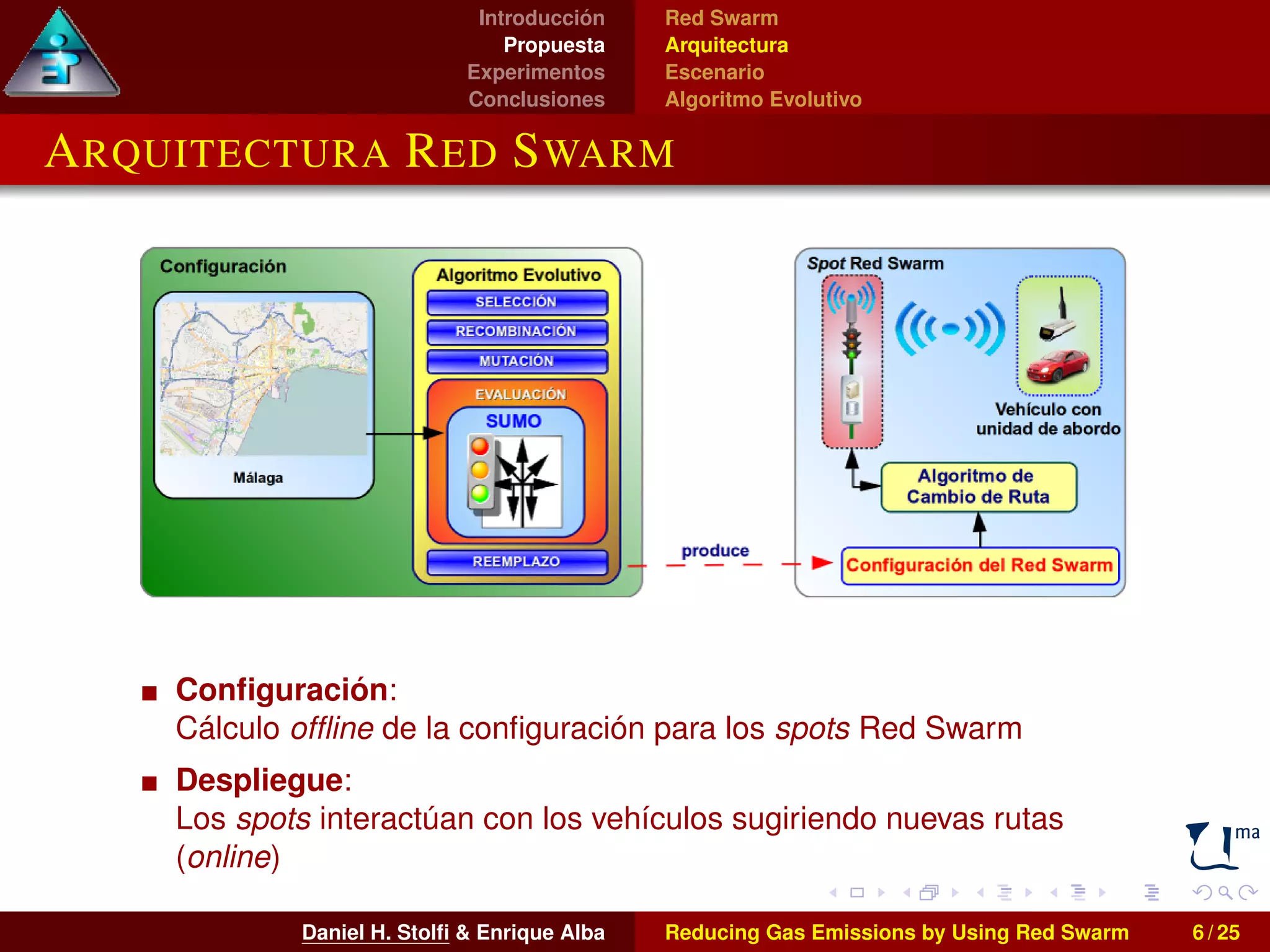





















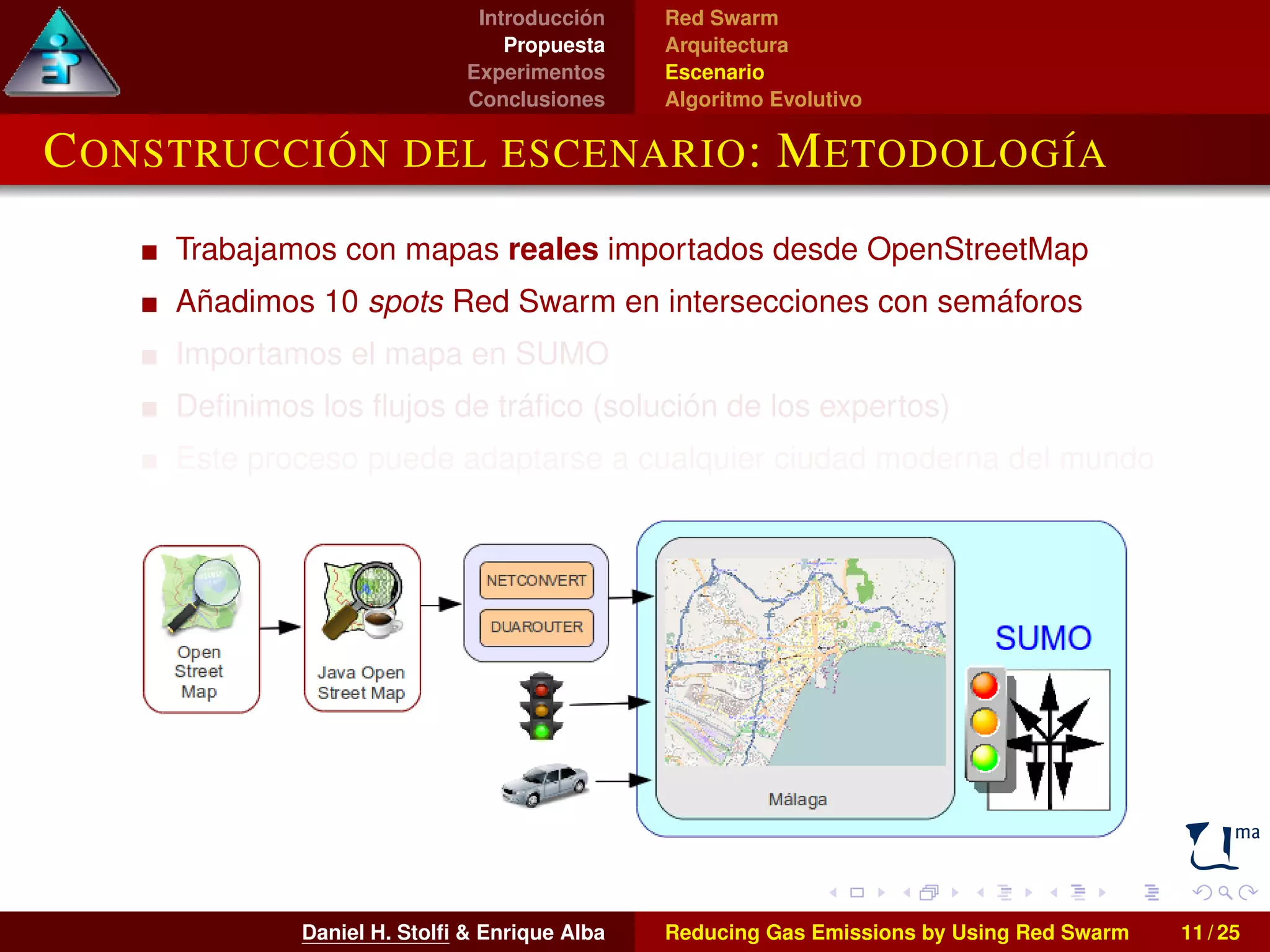
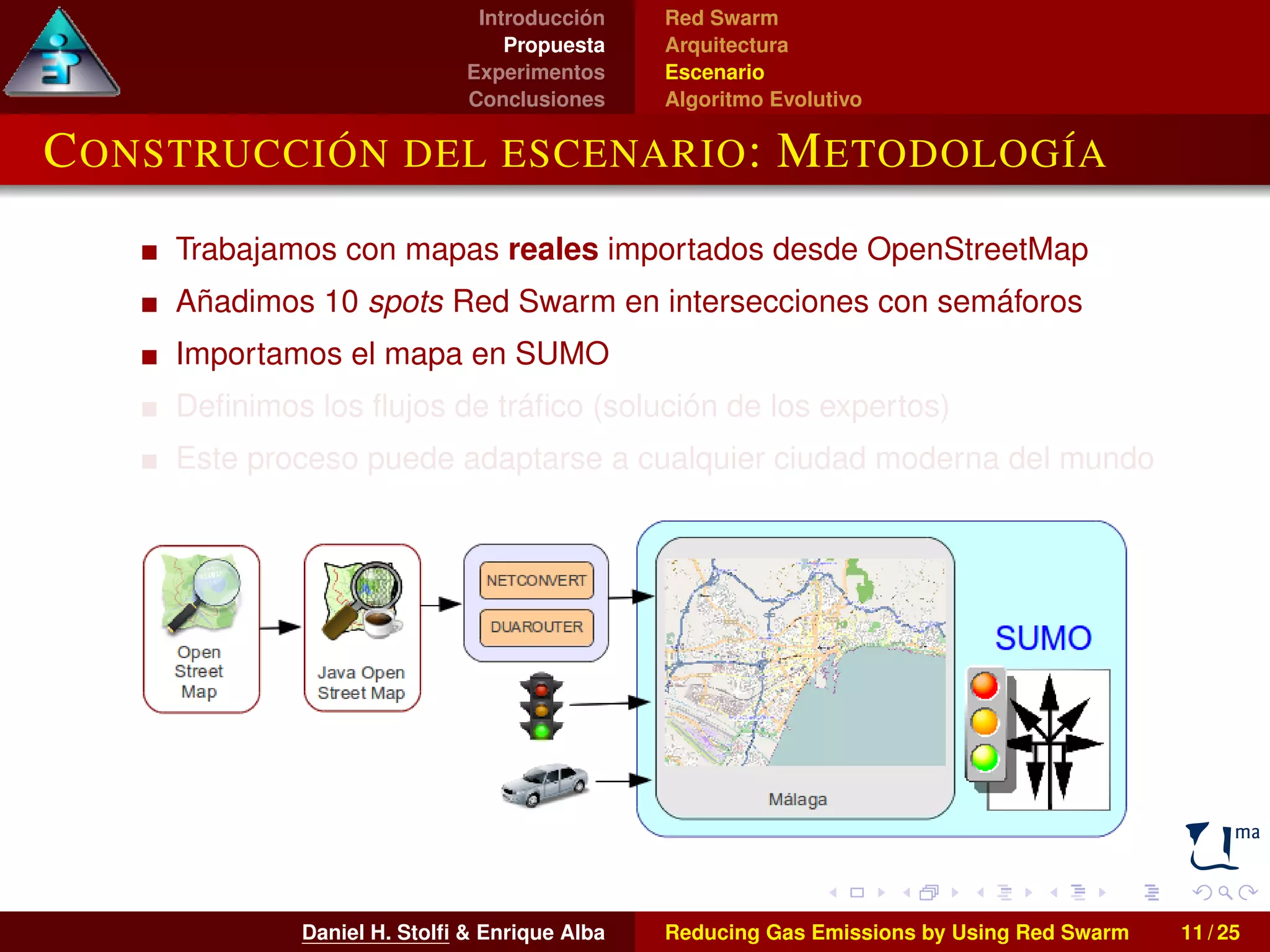
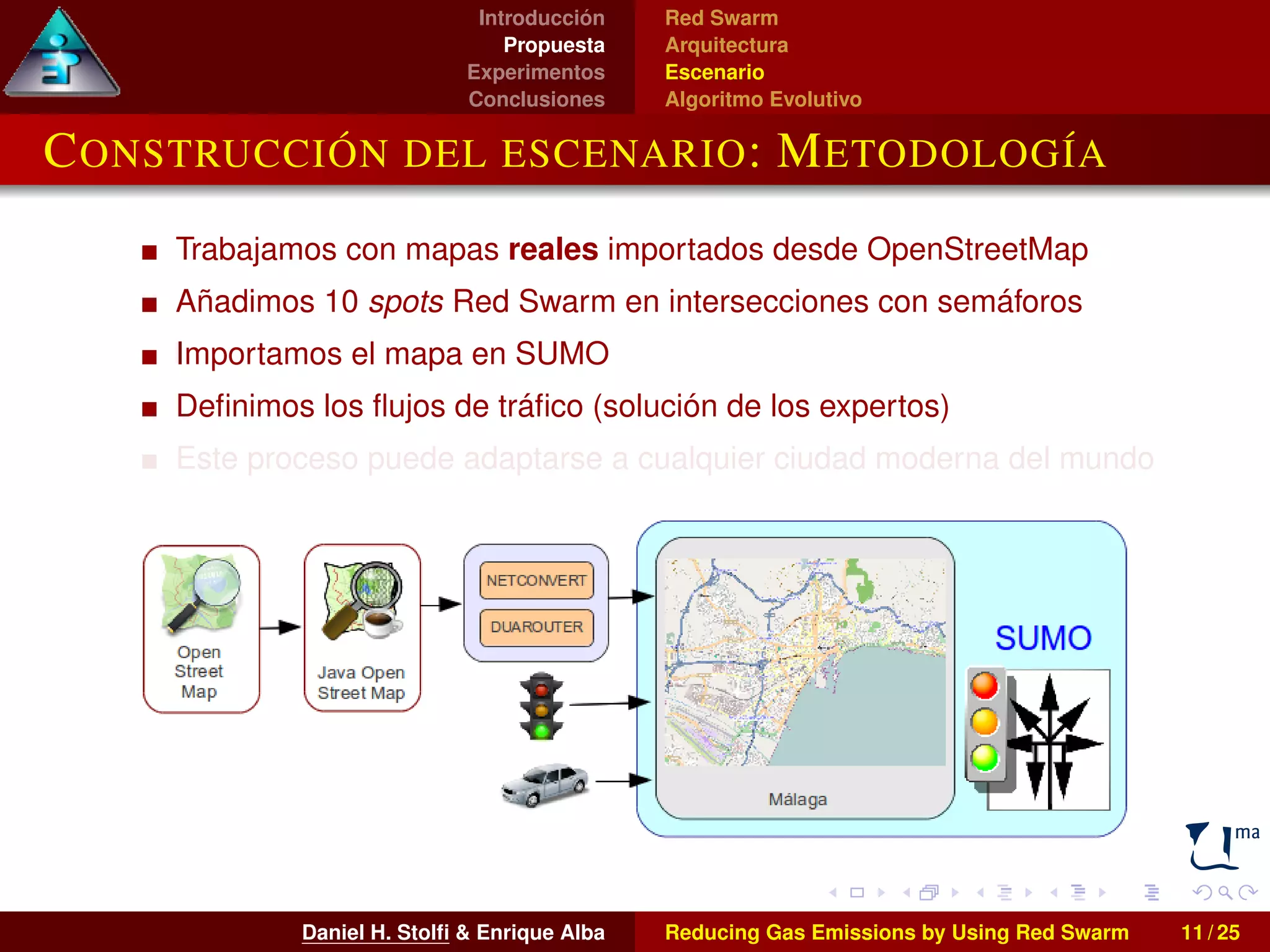
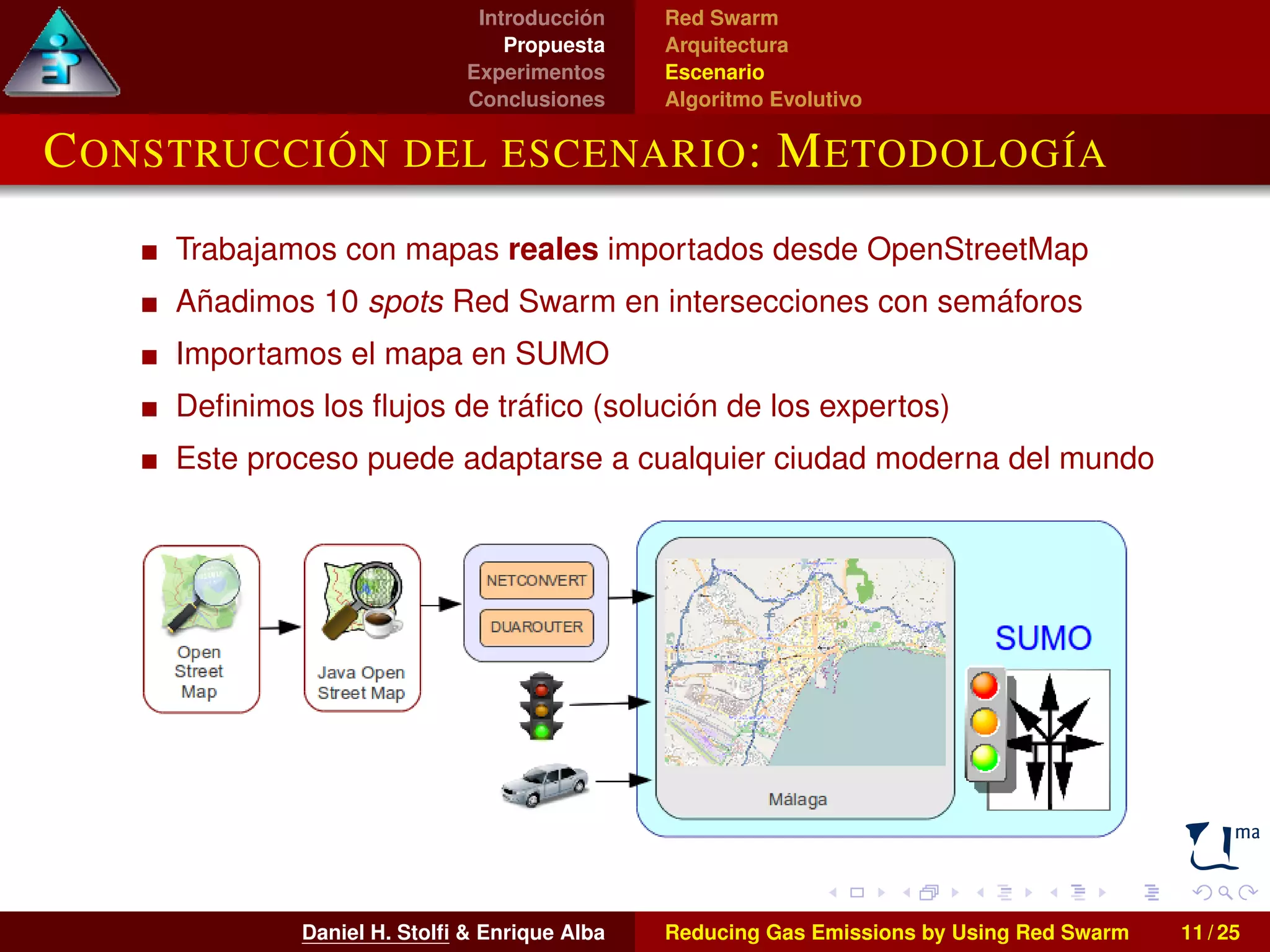

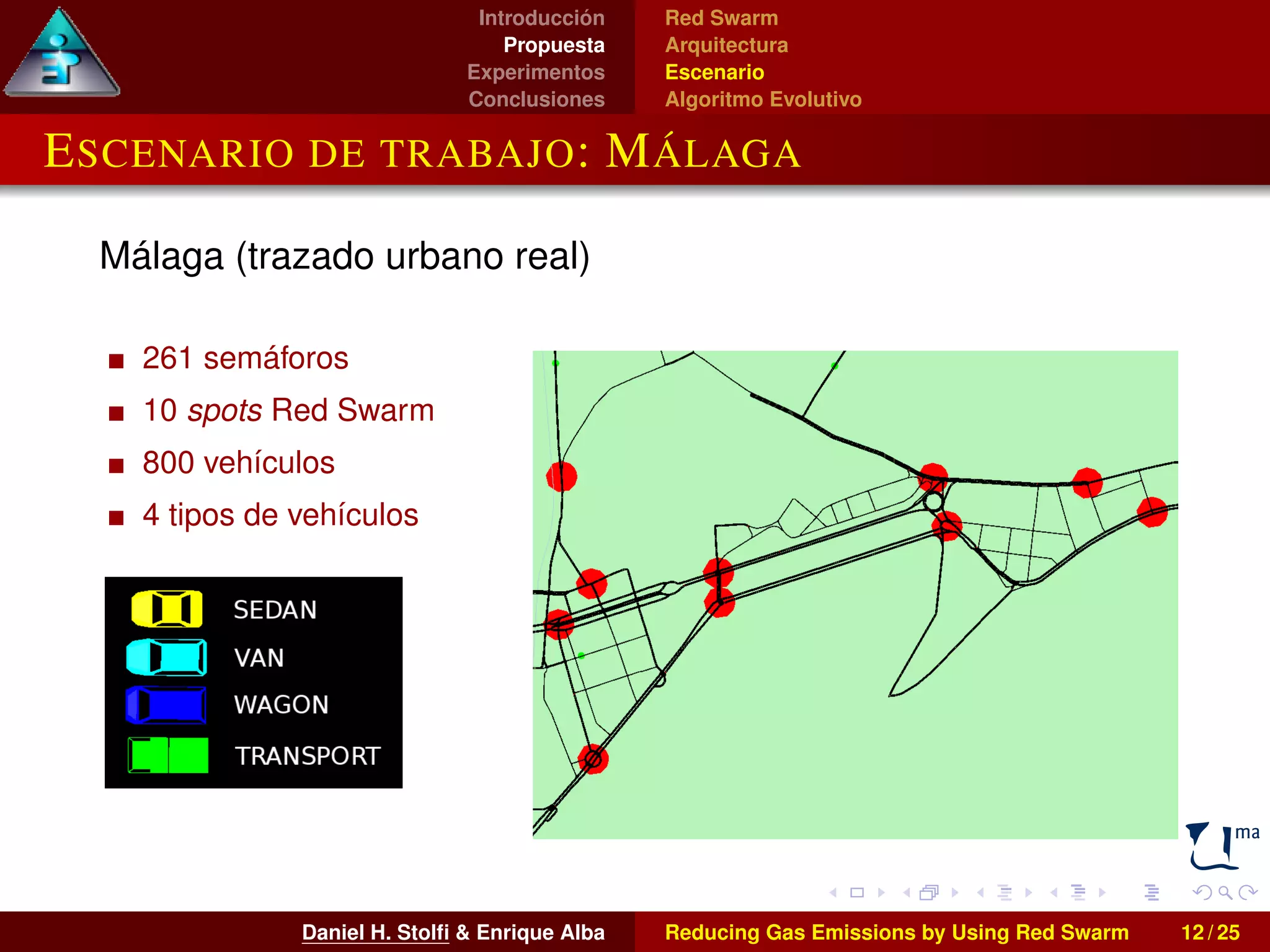
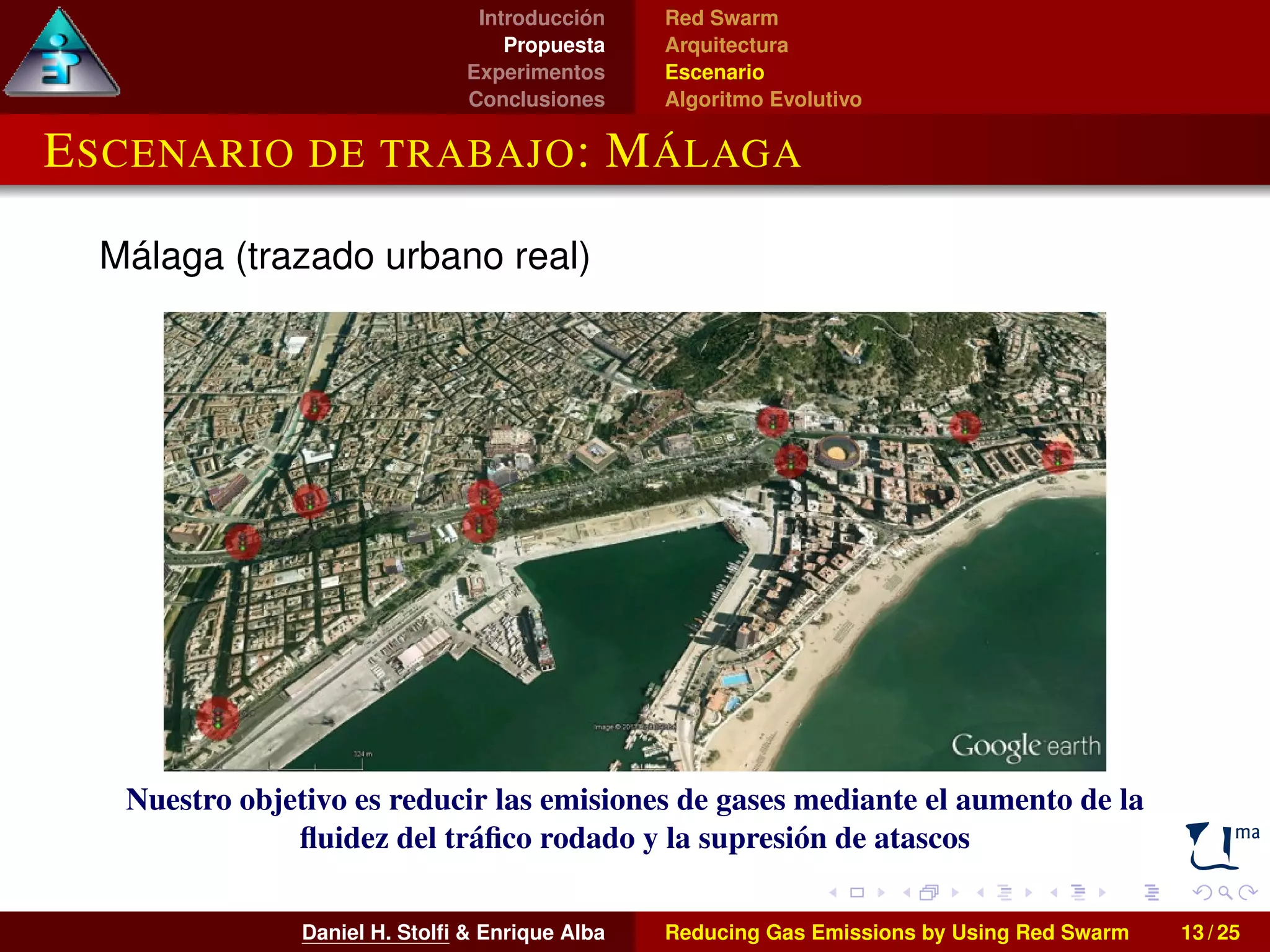
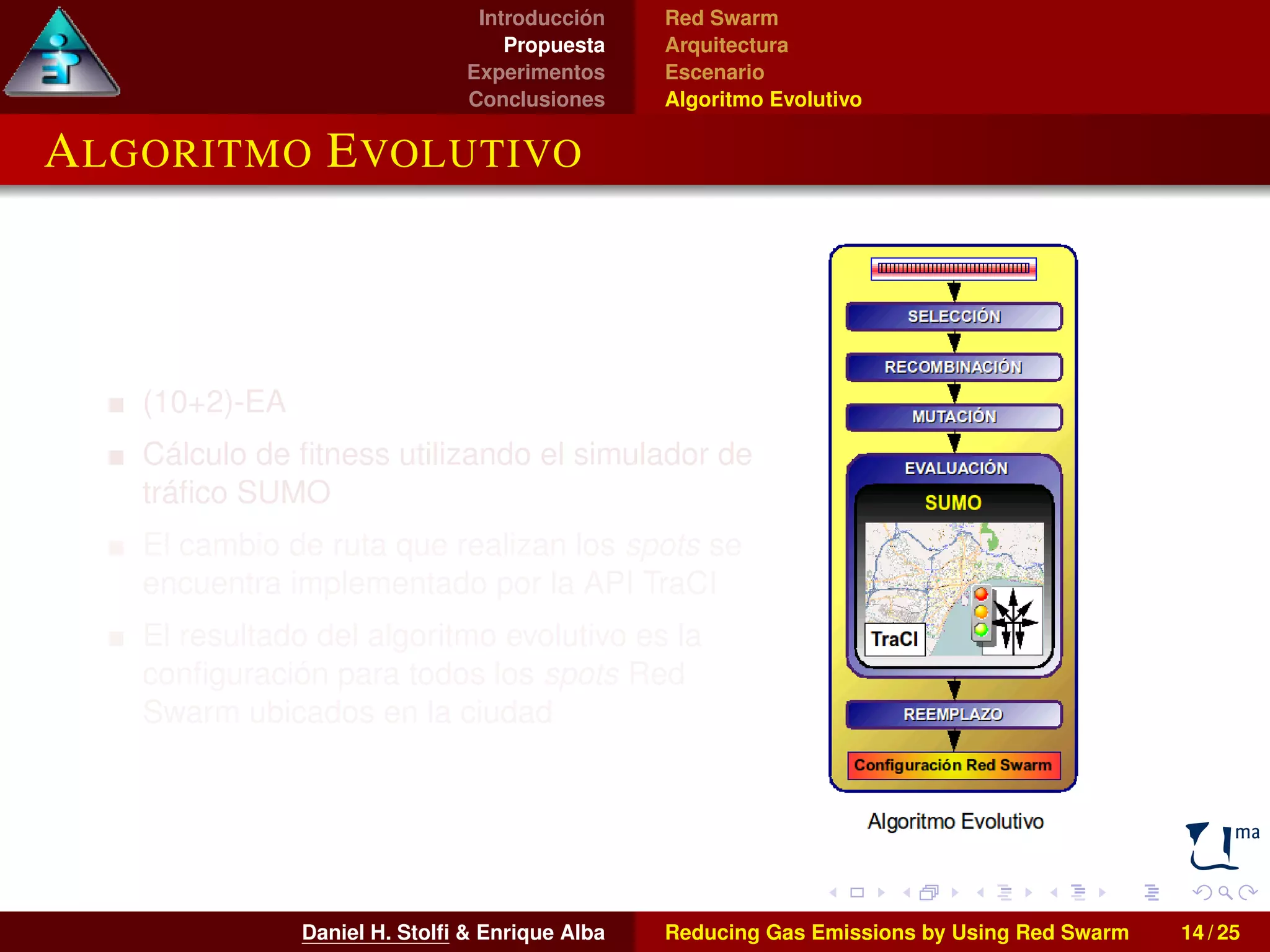
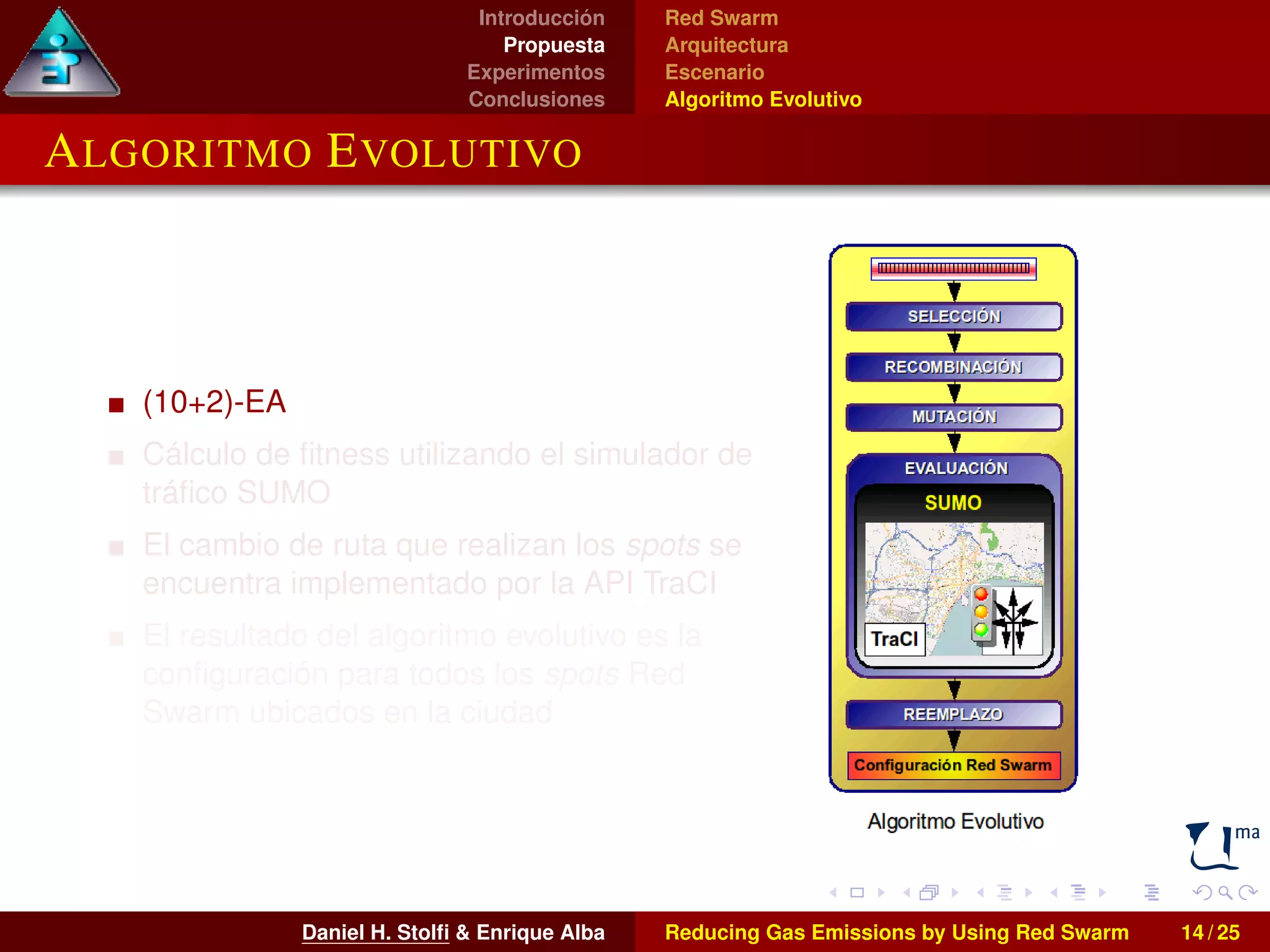
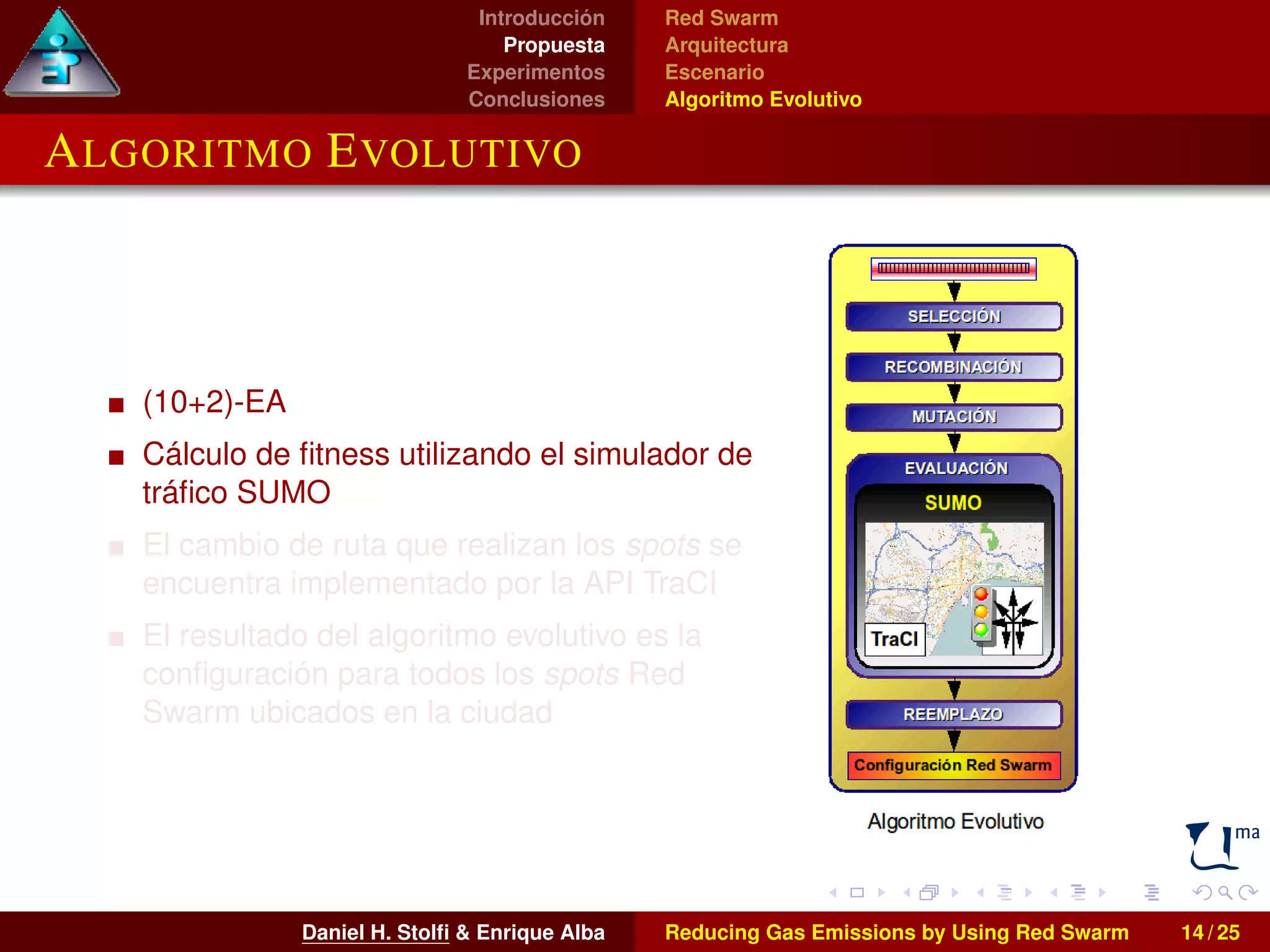
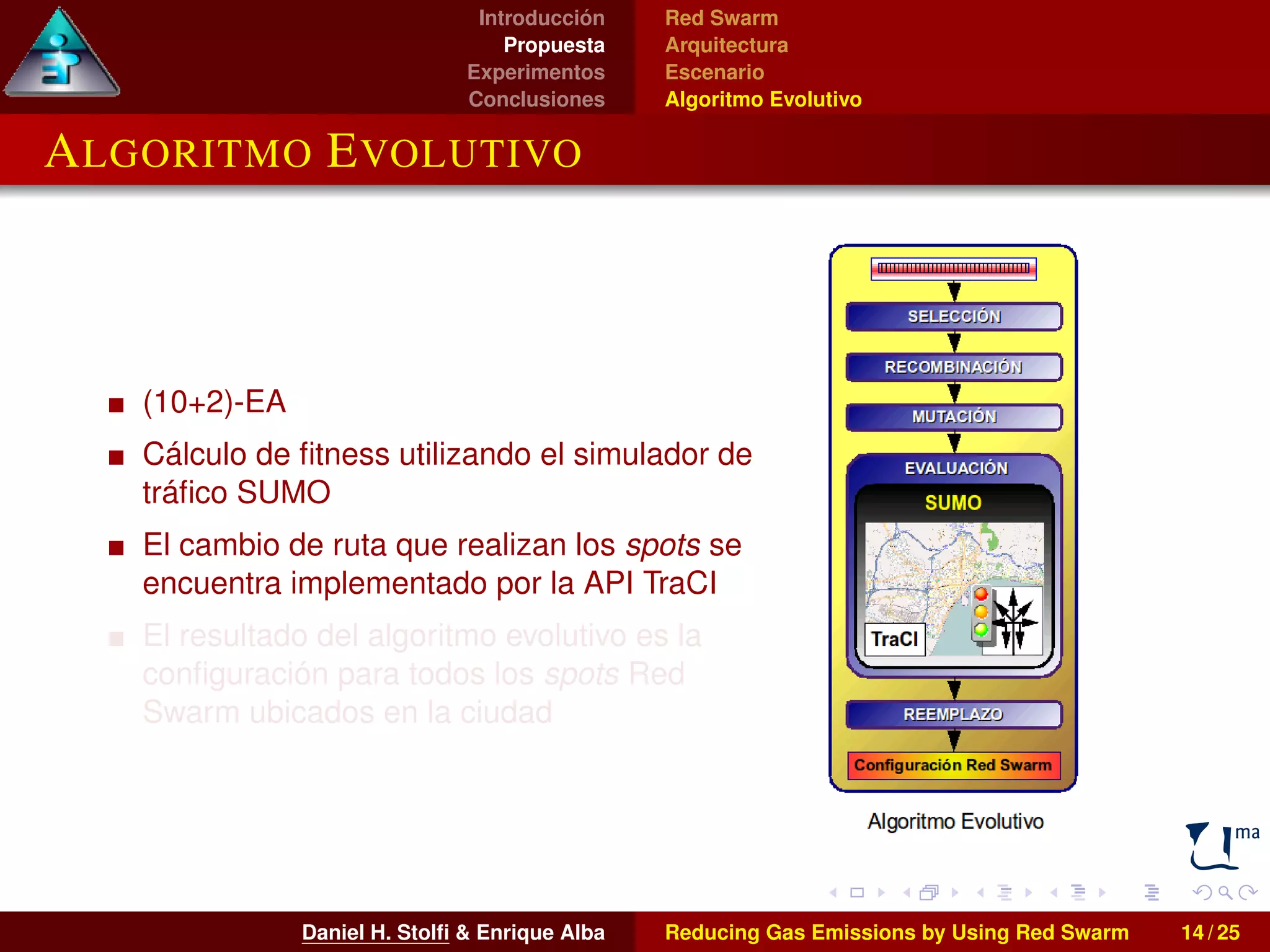
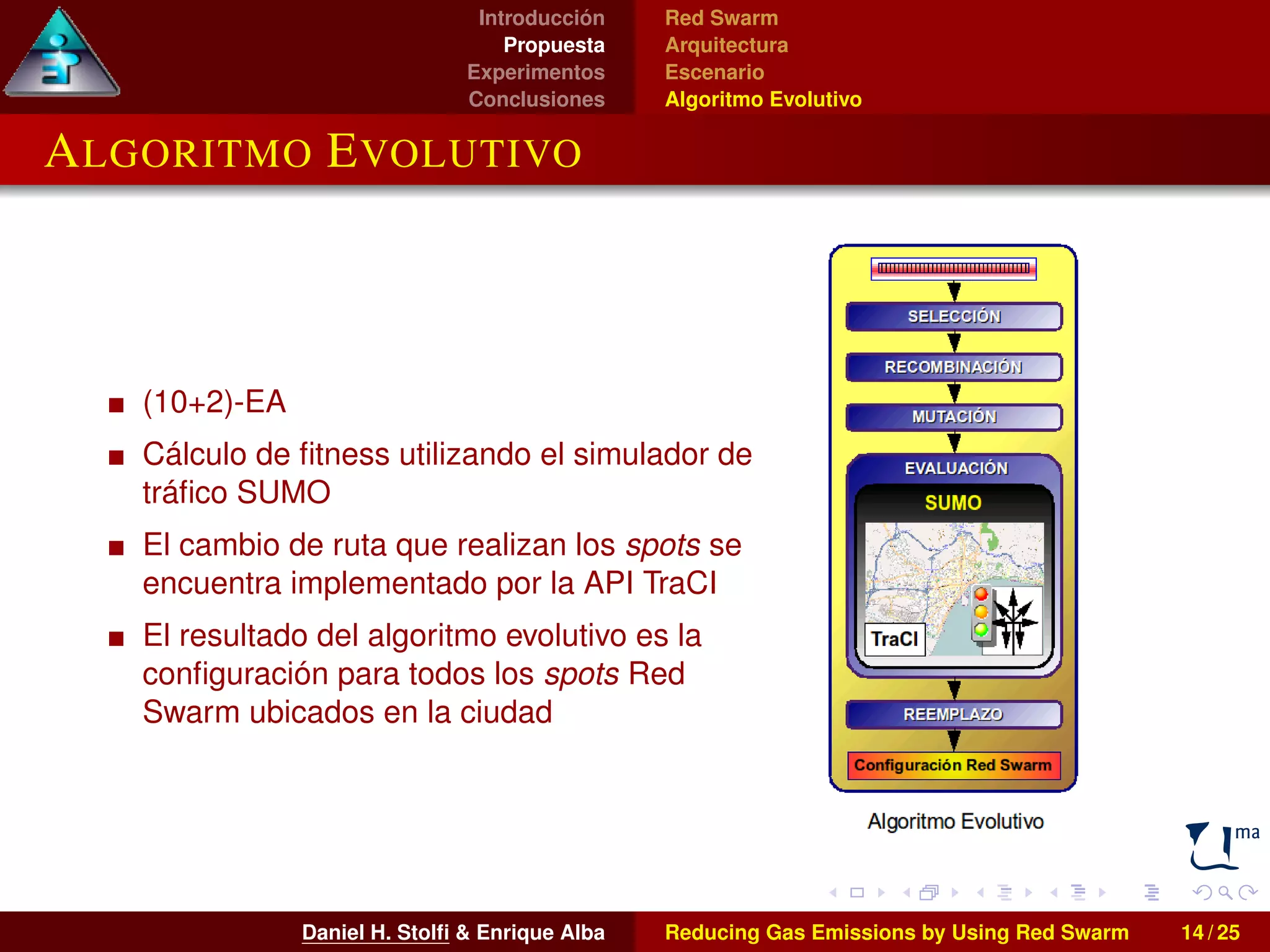
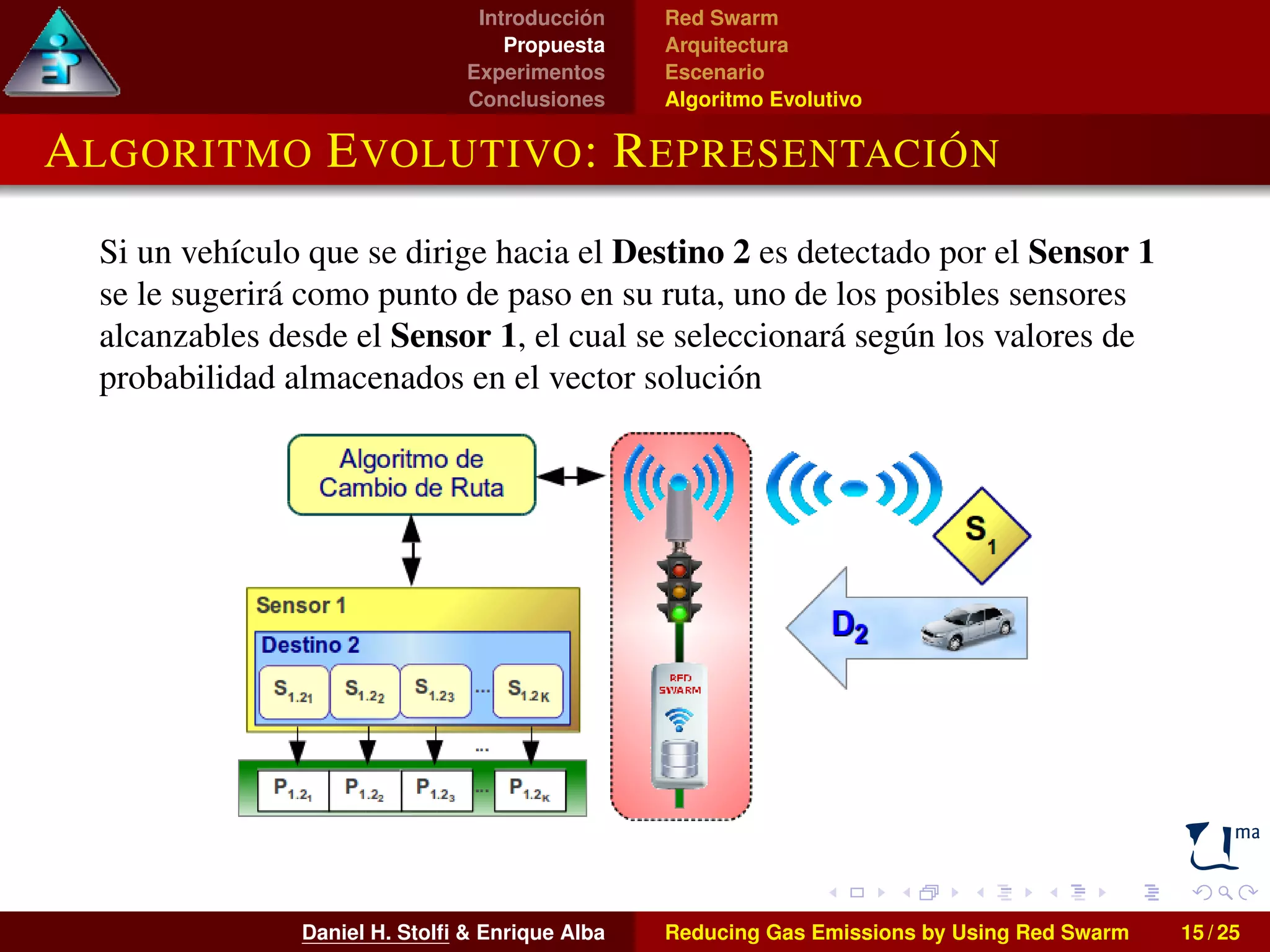
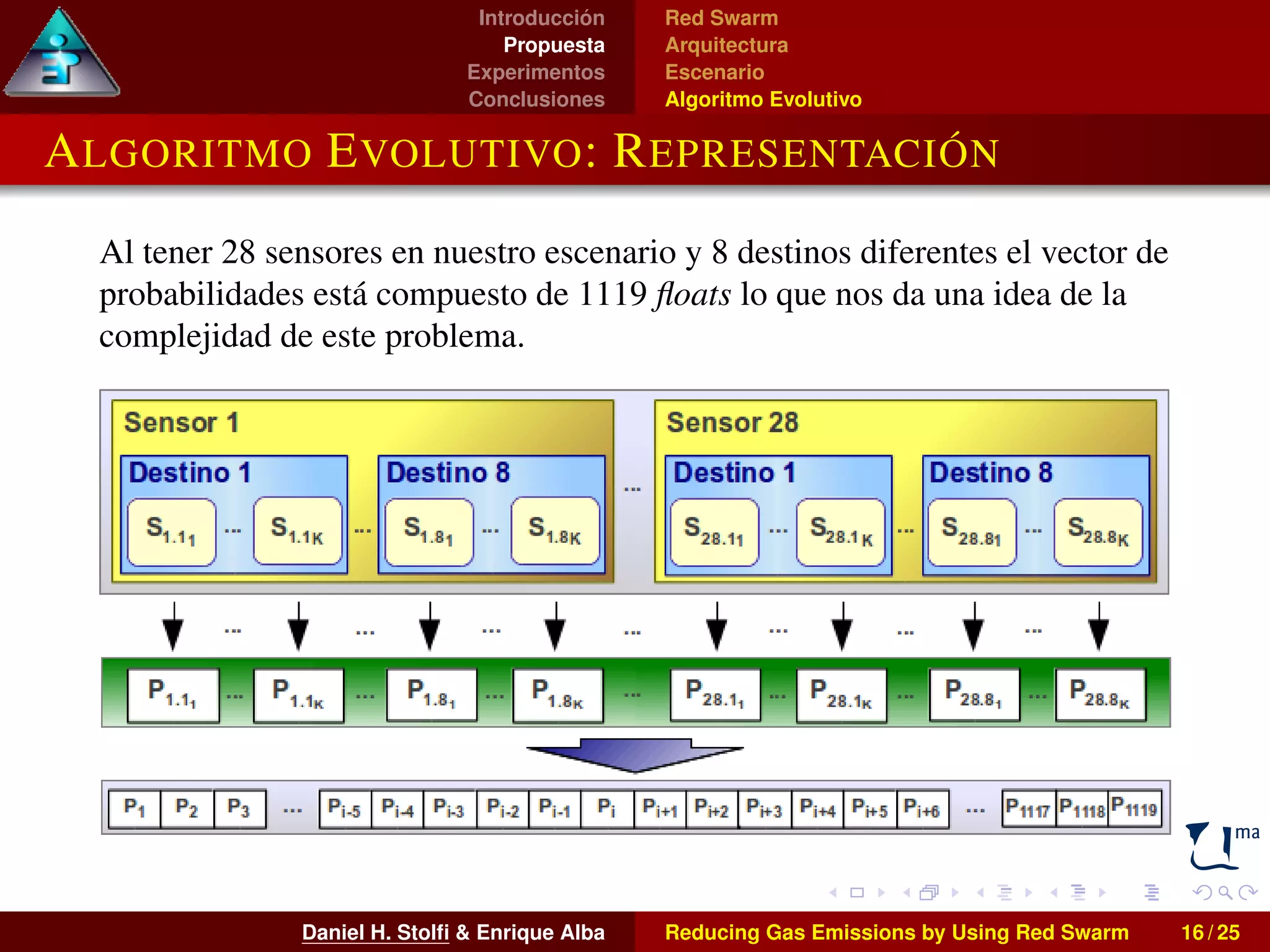
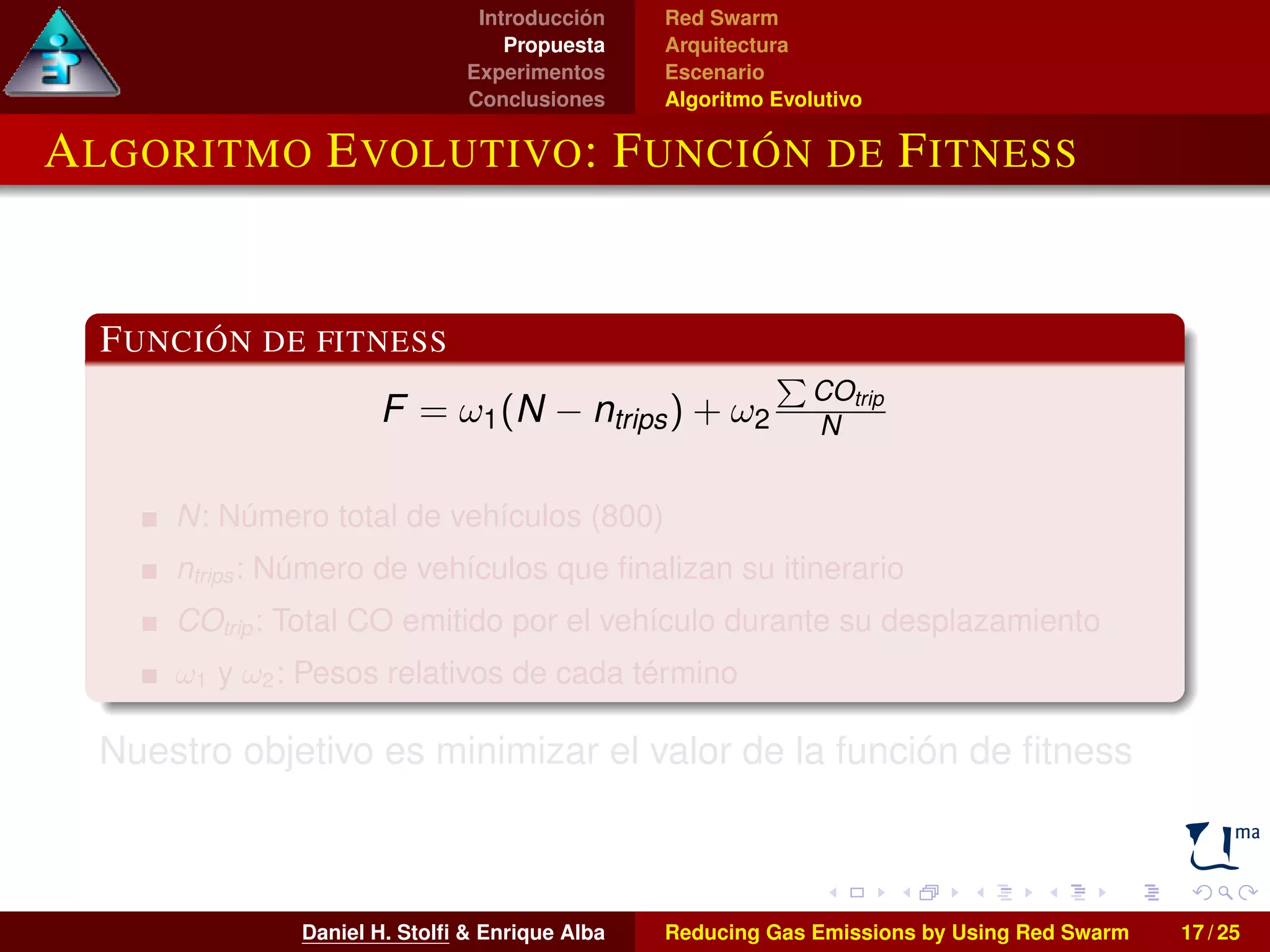
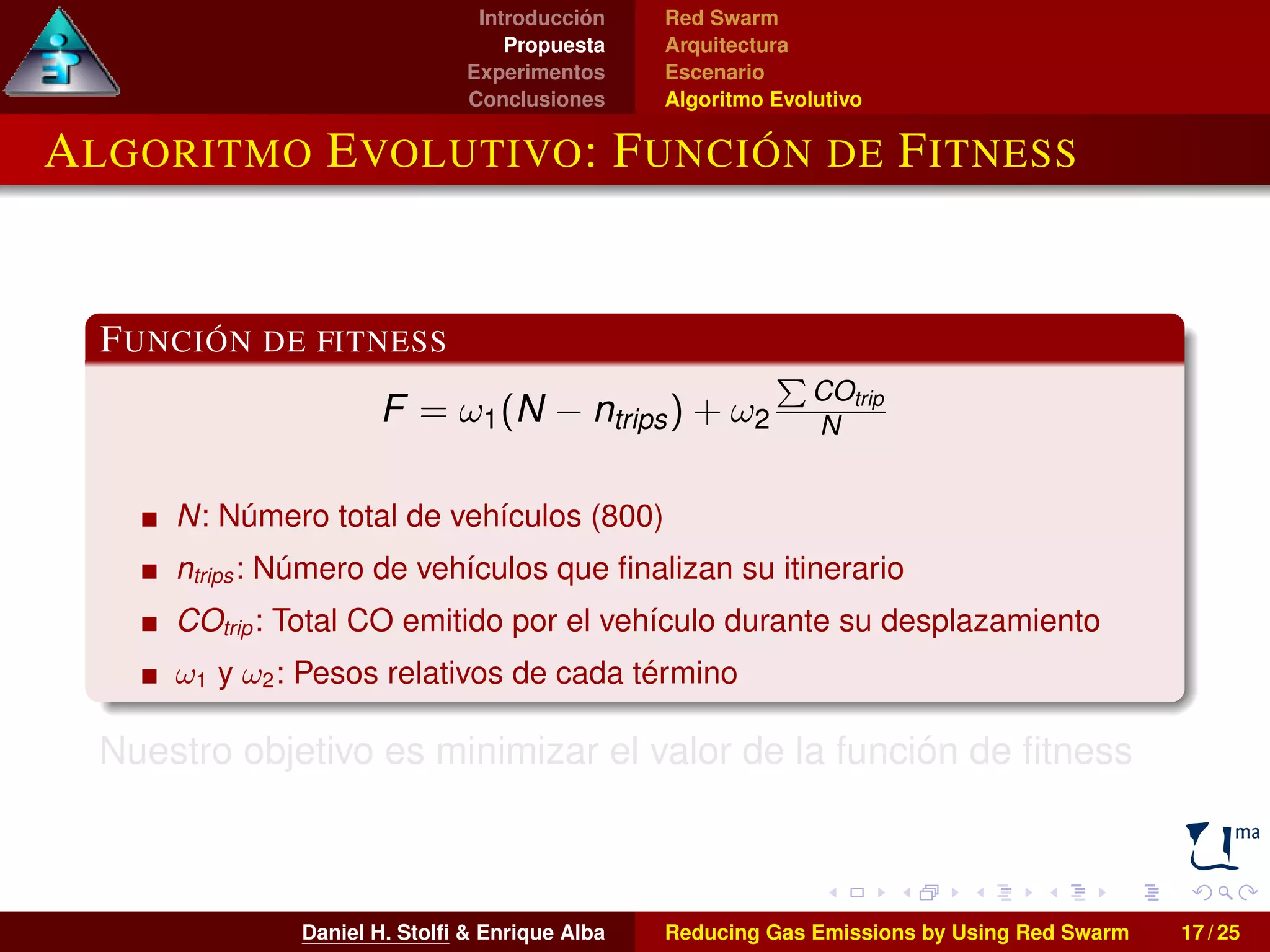
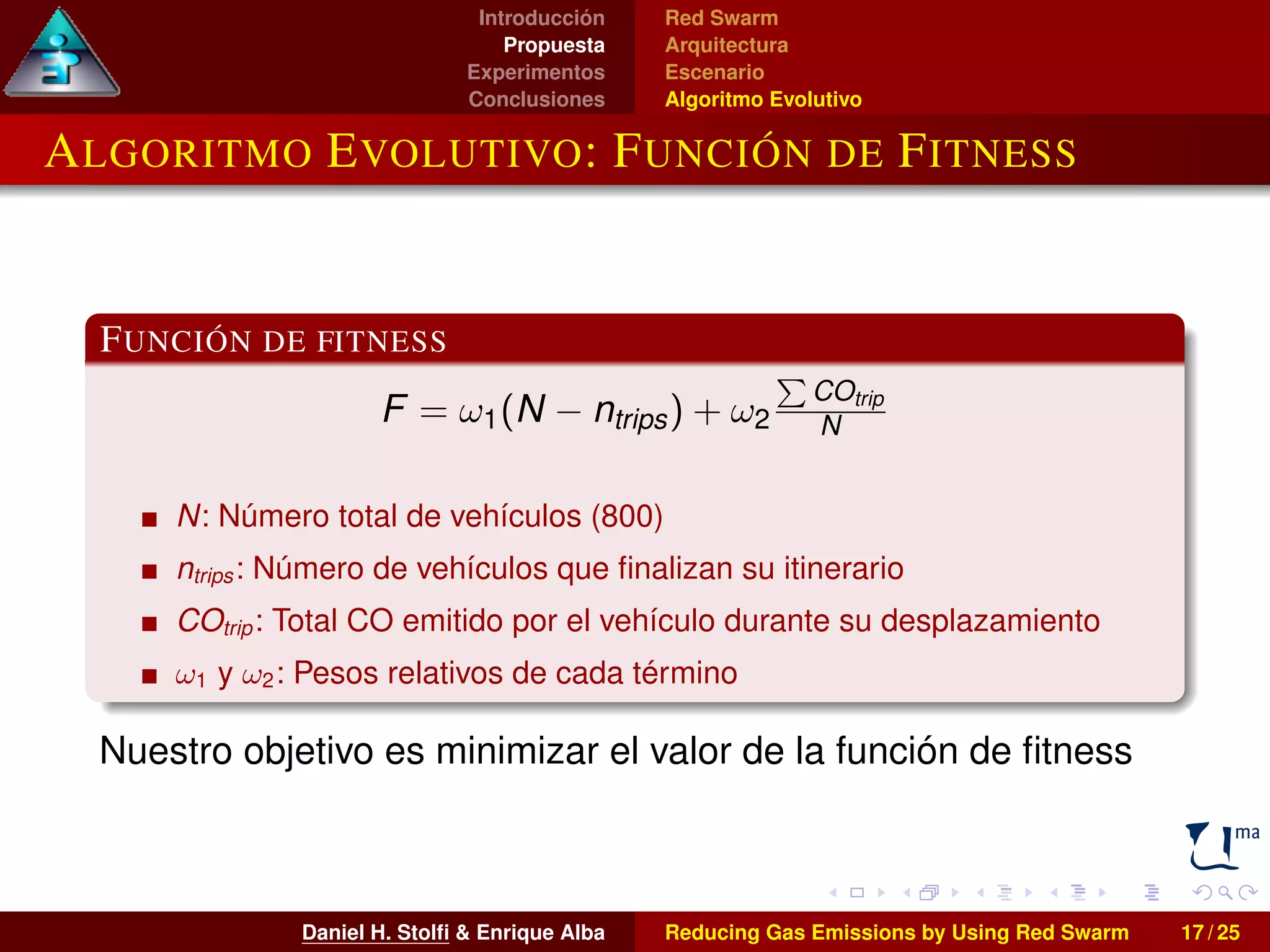
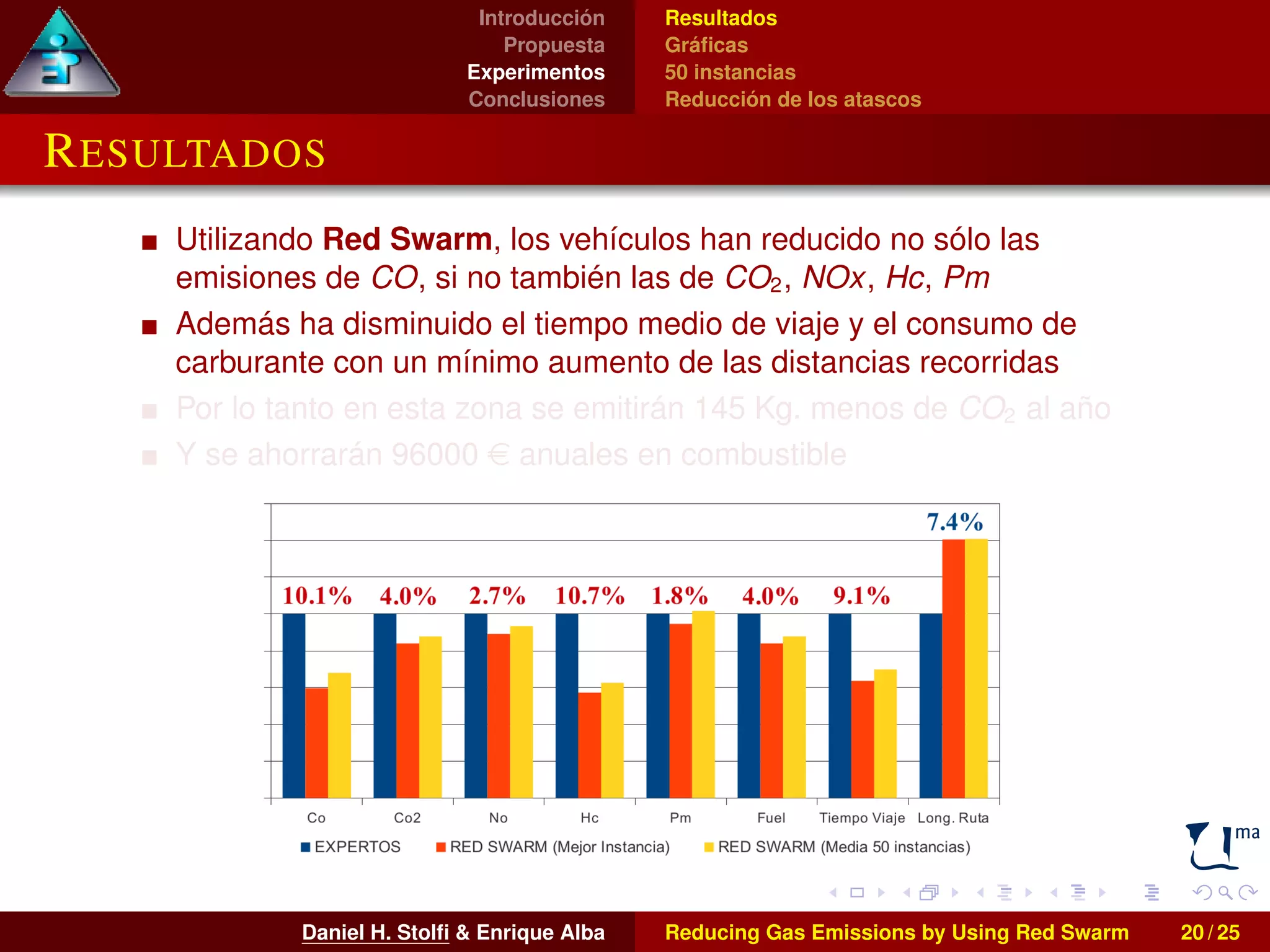
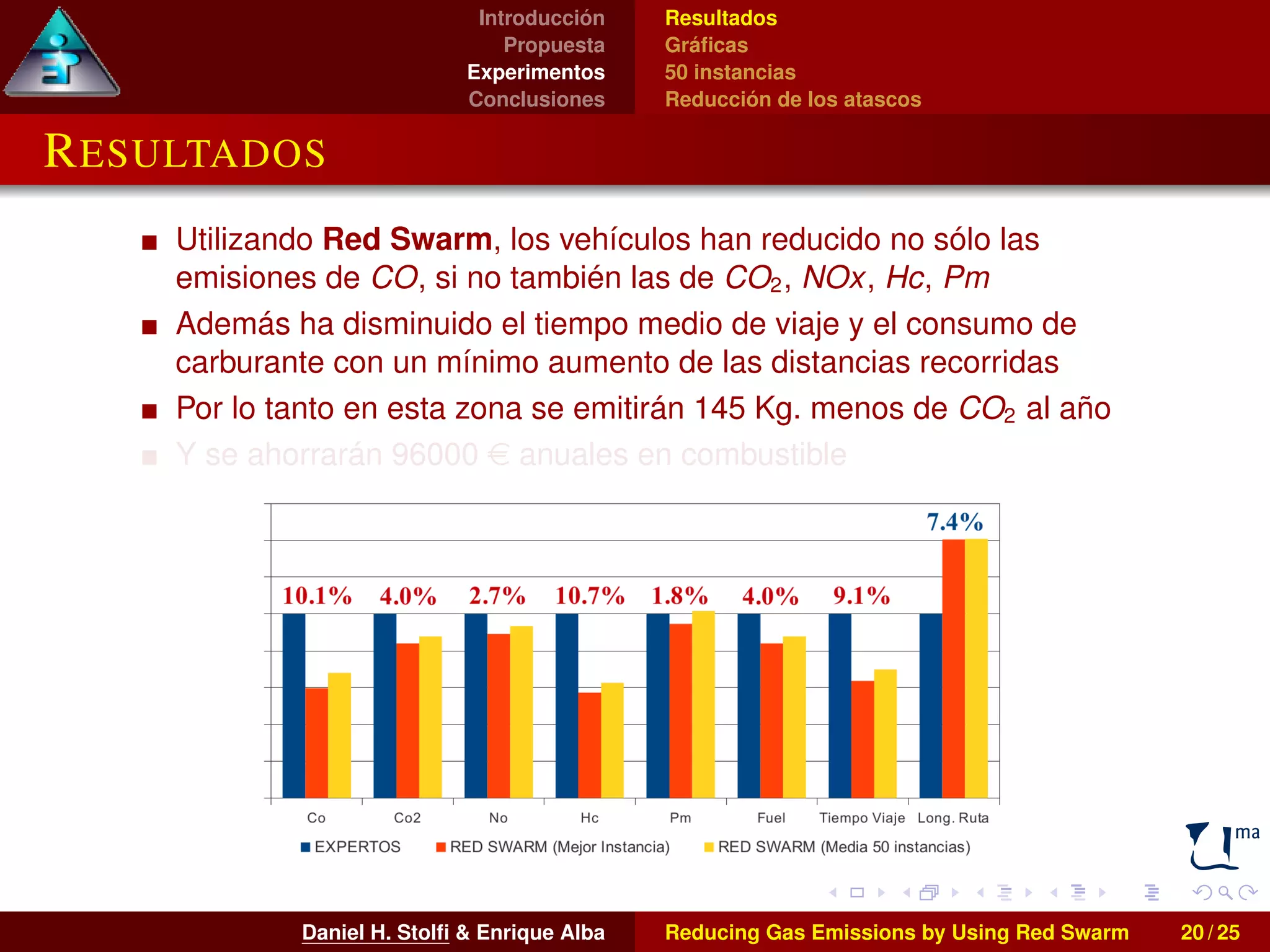
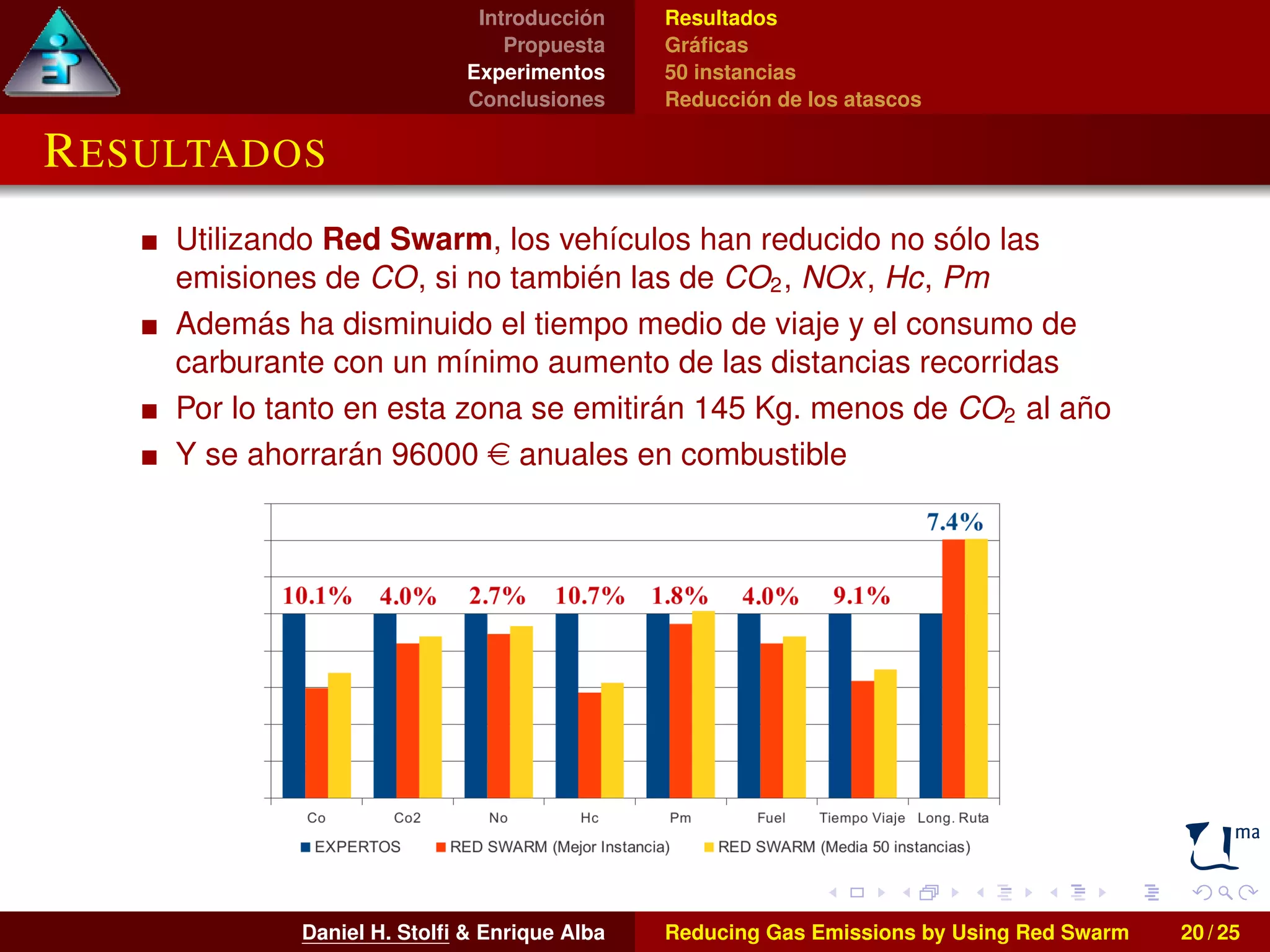
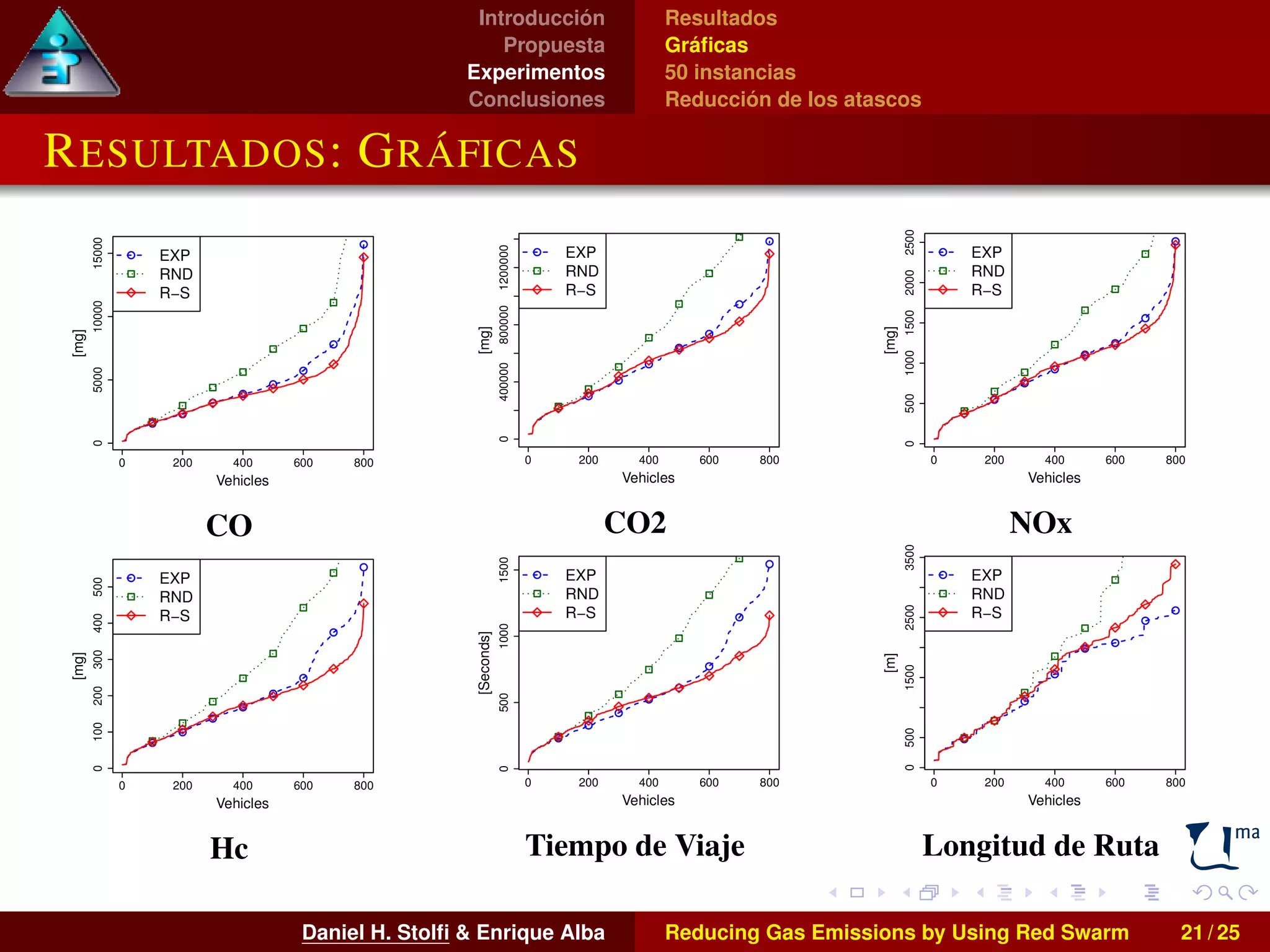



El documento presenta la arquitectura Red Swarm como una solución para reducir las emisiones de gases en las ciudades inteligentes, comunicando vehículos a través de dispositivos Wi-Fi instalados en semáforos. La propuesta incluye un algoritmo evolutivo que sugiere rutas alternativas a los vehículos para minimizar la congestión y mejorar la calidad del aire. Se discuten experimentos y conclusiones que respaldan la efectividad de este sistema en entornos urbanos reales.









































