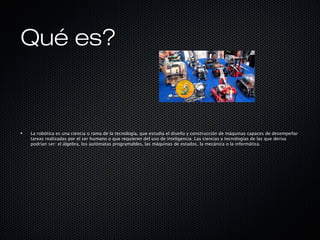
El documento trata sobre la robótica. Explica que la palabra robótica proviene del checo y significa "trabajo forzado" o "servidumbre". Define la robótica como la ciencia que estudia el diseño y construcción de máquinas capaces de realizar tareas humanas. Finalmente, describe brevemente las diferentes generaciones de robots y los tipos principales de robots como los manipuladores, móviles, androides y zoomórficos.