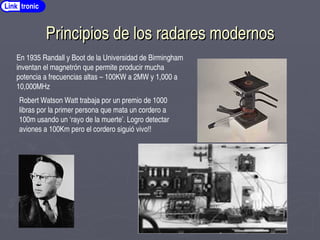
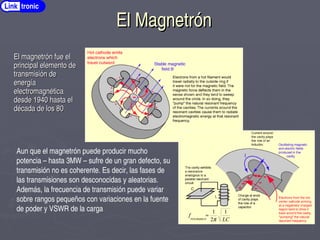
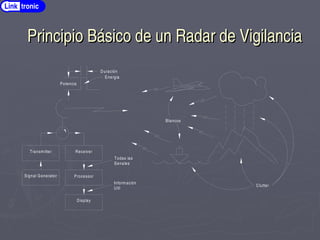
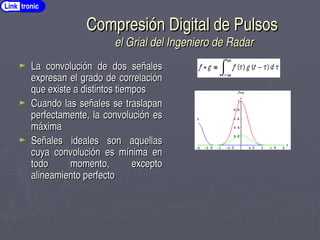
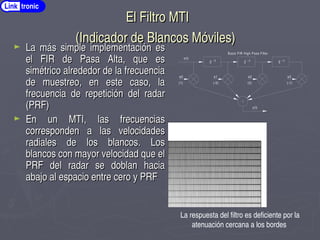
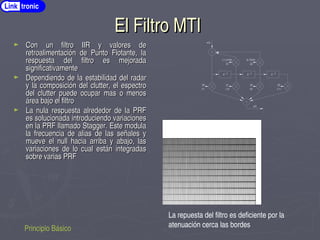
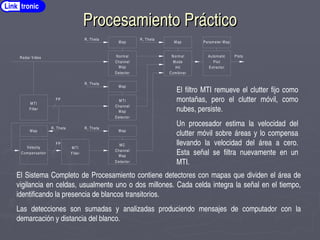
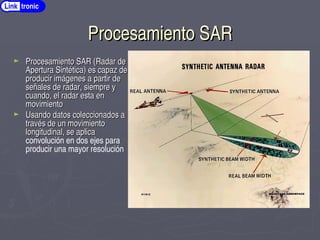
El documento trata sobre la historia y principios de los sistemas de radar y procesamiento en tiempo real. Explica que el radar moderno se originó en la década de 1930 con el desarrollo del magnetrón que permitió producir gran potencia de radiofrecuencia, y cómo la compresión digital de pulsos permite aumentar la energía transmitida sin aumentar la potencia. También describe cómo los filtros MTI permiten separar objetos en movimiento del clutter estacionario.