Este documento presenta una introducción a Arduino y la robótica a través de varios ejercicios prácticos. Se divide en tres lecciones de complejidad creciente que cubren conceptos básicos como parpadeo de LED, semáforos y encender/apagar luces. Los ejercicios se pueden simular en Tinkercad y también implementar físicamente con Arduino. El objetivo es que los estudiantes aprendan los fundamentos de la electrónica, programación y robótica de una manera práctica y divertida.









![14
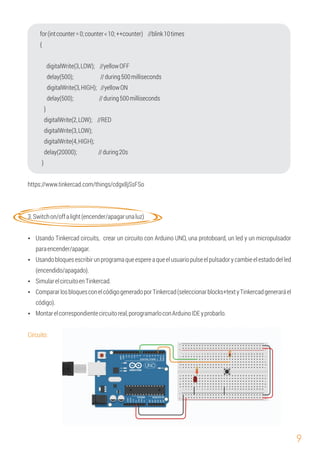
Circuito:
lcd.print("ASCIItable");
Código:
#include<LiquidCrystal.h>
constintrs=13,en=11,d4=7,d5=6,d6=5,d7=4;
LiquidCrystallcd(rs,en,d4,d5,d6,d7);
voidsetup()
{
lcd.begin(16,2);
}
voidloop()
{
delay(3000);
lcd.print(msg);
}
lcd.setCursor(0,0);
delay(500);
{
sprintf(msg,"Ascii:%iChar:%c",i,i);//printscodeandcharacter
}
lcd.clear();
for(inti=32;i<256;i++)//fromblankspacetoendofasciitable
charmsg[20];
https://www.tinkercad.com/things/icWyROFaZr9](https://image.slidesharecdn.com/exercisesandsolutionsroboticses160720-210826135050/85/Tinkercad-Practicas-y-soluciones-16-320.jpg)
![15
3. Medidadetemperatura
voidsetup()
}
{
charmsg[20];
lcd.setCursor(0,0);
//setuptheLCD'snumberofcolumnsandrows:
LiquidCrystallcd(rs,en,d4,d5,d6,d7);
lcd.print(msg);
{
constintrs=13,en=11,d4=7,d5=6,d6=5,d7=4;
Usando un sensor LM35 se deberá mostrar la temperatura actual en un LCD. Consultar la documentación sobre
elLM35en: http://www.ti.com/lit/ds/symlink/lm35.pdf.Comosepuedecomprobar,elsensordaunatensiónde
10mV/ºC.
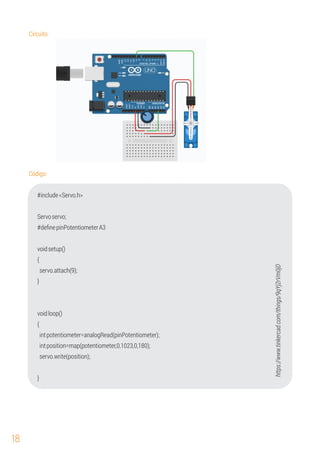
Circuito:
Código:
#include<LiquidCrystal.h>
lcd.begin(16,2);
voidloop()
inttemp=analogRead(0)*500/1023;//10mV/ºC->converttoºC
sprintf(msg,"Temp=%d%cC",temp,178);//createthetextstringtosendtotheLCD
}
https://www.tinkercad.com/things/8h3Z9DviRtp](https://image.slidesharecdn.com/exercisesandsolutionsroboticses160720-210826135050/85/Tinkercad-Practicas-y-soluciones-17-320.jpg)






![23
}
for(inti=0;i<NumLeds;i++)
}
Código:
#include"FastLED.h"
{
for(inti=0;i<NumLeds;i++)
voidloop()
delay(100);
voidsetup()
#defineDATA_PIN6
//redincreasinggradient
randomSeed(analogRead(0));
leds[i].red=i;FastLED.show();
#defineNumLeds30
{
FastLED.addLeds<NEOPIXEL,DATA_PIN>(leds,NumLeds);
{
{
leds[i]=CRGB::Black;FastLED.show();delay(30);
CRGBleds[NumLeds];
//whitesweep
leds[i]=CRGB::White;FastLED.show();delay(30);
//clearingred
for(inti=0;i<NumLeds;i++)
//colorgradient
}](https://image.slidesharecdn.com/exercisesandsolutionsroboticses160720-210826135050/85/Tinkercad-Practicas-y-soluciones-25-320.jpg)
![24
delay(100);
//greeincreasinggradient
{
leds[i].red=0;FastLED.show();
}
for(inti=0;i<NumLeds;i++)
{
leds[i].green=i;FastLED.show();
}
delay(100);
//clearinggree
for(inti=0;i<NumLeds;i++)
{
leds[i].green=0;FastLED.show();
delay(100);
}
delay(100);
for(inti=0;i<NumLeds;i++)
leds[i].blue=i;FastLED.show();
//clearingblue
{
//blueincreasinggradient
for(inti=0;i<NumLeds;i++)
{
delay(100);
}
leds[i].blue=0;FastLED.show();
}](https://image.slidesharecdn.com/exercisesandsolutionsroboticses160720-210826135050/85/Tinkercad-Practicas-y-soluciones-26-320.jpg)
![25
{
green=random(255);
inttime=millis();
leds[led].red=red;
red=random(255);
blue=random(255);
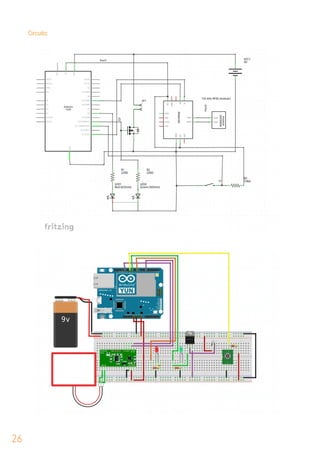
Ÿ El programa leerá los tokens a través del RMD6300, que estará conectado al puerto serie de Arduino,
comprobarásieltokenestáautorizado,yabrirálapuertaencasoafirmativo.
FastLED.show();
}while(millis()<(time+5000)); //during5seconds
leds[led].green=green;
do
}
leds[led].blue=blue;
led=random(NumLeds);
//randomcolorsoneachled
intred,green,blue,led;
Ÿ El Arduino Yun mantendrá un archivo con una lista de los usuarios autorizados y los tokens, y otro archivo
conunlogdelosaccesos.
Documentation:
3.ControldeaccesosconArduinoYun
Ÿ El objetivo de este ejercicio es controlar el acceso a un lugar controlando una cerradura eléctrica mediante
tokensRFIDyunlectorRMD6300utilizandounArduinoYun.
Ÿ RMD6300
Ÿ RFIDtokens](https://image.slidesharecdn.com/exercisesandsolutionsroboticses160720-210826135050/85/Tinkercad-Practicas-y-soluciones-27-320.jpg)

![28
Console.begin();//startcommunicationwithethernetconsole(300bps)
#endif
#ifdefDEBUG
Console.println("Arduinostarting......");
//greenledpin8
#defineBUTTON11
//redledpin10
#defineGREEN8
#defineRED10
RFID.begin(9600);//startserialtoRFIDreader
pinMode(GREEN,OUTPUT);
voidsetup()
pinMode(RED,OUTPUT);
Bridge.begin();//startcommunicationwithlinino
{
while(!Console);//waituntilconsoleisready
/*//initializecomunicationwiththefilesysteminthelininopart
FileSystem.open("users",FILE_READ);
}
chartag[14];
intindex=0;
inti;
FileSystem.begin();
voidloop()
{
*/](https://image.slidesharecdn.com/exercisesandsolutionsroboticses160720-210826135050/85/Tinkercad-Practicas-y-soluciones-30-320.jpg)
![29
UsersFile.close();//finishedreading,fileclosed
FileLogFile=FileSystem.open("/root/accesslog",FILE_APPEND);
FileUsersFile=FileSystem.open("/root/users",FILE_READ);
{
//createobjetsUsersFile,linkedtousersinlinino,openforreading
#endif
i=RFID.read();
tag[index++]=i;
Console.println("");//sendingLFtotheconsole(ifnotitdoesnotshow)
#ifdefDEBUG//printingthecodereadedtotheconsoleterminal
charrfid[10],user[25],userOK[25]="";
do//makingasweepofthe13bytesandputtingalltogetherinastring
}while(i!=3);
{
if(TagCheck(atol(rfid),tag))//convertstringtonumberandcheckagainsttag
{
Console.print("");
OK=1;
strcpy(userOK,user);
Console.print(i);
#ifdefDEBUG
#endif
intOK=0;
while(ReadUser(UsersFile,rfid,user)==0)//wewillsweepallusersfileuntiluserfoundorEOF
}
if(RFID.available()>13)//RFIDtokenis13byteslong,soIcheckifthereisatleast13bytes
{
}
//creatinglog,itwilladdusertotheendofthelogfile](https://image.slidesharecdn.com/exercisesandsolutionsroboticses160720-210826135050/85/Tinkercad-Practicas-y-soluciones-31-320.jpg)




![34
// Checkdecimalnumberprintedontagagainsttagreaded
// byRFIDsensorinHEXformat
// code->decimalcodeprintedontag
//
{
unsignedcharHexData[4];
for (int i = 3, index = 0; i < 11; i = i + 2, index++) HexData[index] = (HexToNum(tag[i]) << 4) + HexToNum(tag[i +
1]);
//
// tag[]->characterarraycontainigtaginHEXformat
intTagCheck(unsignedlongintcode,char*tag)
unsignedlongintCalcCode=HexData[0];
CalcCode=(CalcCode<<8)+HexData[i++];//generatethecodeusinghexdigitsweights
while(i<4)
returncode==CalcCode;
////////////////////////////////////////////////////////
}
//
// ConvertRFIDsensorinHEXformattonumericformat
}
inti=0;
// code->decimalcodeprintedontag
//
checksum=checksum^HexData[i];
// longCalcCode
// asprintedintags
intchecksum=0x0A;
{](https://image.slidesharecdn.com/exercisesandsolutionsroboticses160720-210826135050/85/Tinkercad-Practicas-y-soluciones-36-320.jpg)
![35
{
//
intchecksum=0x0A;
// Returns0ifeverythingwentOKand>0ifthereissomeerror:
unsignedlongintlongCalcCode(char*tag)
for (int i = 3, index = 0; i < 11; i = i + 2, index++) HexData[index] = (HexToNum(tag[i]) << 4) + HexToNum(tag[i +
1]);
unsignedlongintCalcCode=HexData[0];
while(i<4)
unsignedcharHexData[4];
// tag[]->characterarraycontainigtaginHEXformat
inti=0;
}
checksum=checksum^HexData[i];
CalcCode=(CalcCode<<8)+HexData[i++];//generatethecodeusinghexdigitsweights
returnCalcCode;
//////////////////////////////////////////////////////////////////////////////////////////////////////////
// ReadUser
//
}
// Readslininofileforthenexttagid
// ReturnstagIDinstringformatattagandusernamealsoinstringformatatusername
// 1->Errorreadingfile/root/users
// 2->Error:/root/usersmaybeempty?
intReadUser(File&UsersFile,char*tag,char*username)
{
if(UsersFile==0)return1;](https://image.slidesharecdn.com/exercisesandsolutionsroboticses160720-210826135050/85/Tinkercad-Practicas-y-soluciones-37-320.jpg)
![36
if(UsersFile.available()==0)return2;//nodatafound.MaybeEOF?
chardata[25]="xx";
inti=0;
while(UsersFile.available()>0&&data[i]!='n')//readfileuntilEOForLFfound
{
tag[i++]='0';//addstringterminator
{
tag[i]=data[i];
return0;//allwentOK
// Thisfunctionreturnastringwiththetimestamp
intn=0;
{
}
i=0;
}while(data[++i]!='n');
// getTimeStamp()
// Fromhttps://www.arduino.cc/en/Tutorial/YunDatalogger
//////////////////////////////////////////////////////////////////////////////////////////////////////////
if(data[i]!='n')i++;//nextcharuntilLFfound
//
//
data[i]=UsersFile.read();
do//readusername,untilLFfound
do//readtag,until:found
username[n++]=data[i];
}
//
username[n]='0';//addendofstring
}while(data[++i]!=':');](https://image.slidesharecdn.com/exercisesandsolutionsroboticses160720-210826135050/85/Tinkercad-Practicas-y-soluciones-38-320.jpg)














































![presentacion6 [Autoguardado].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/presentacion6autoguardado-240209211808-b8a01baa-thumbnail.jpg?width=640&height=640&fit=bounds)







