1. CAPITULO 9
INSTALACIONES ELÉCTRICAS INDUSTRIALES
9.1 REQUISITOS BÁSICOS DE LAS INSTALACIONES INDUSTRIALES
Las instalaciones eléctricas industriales se dividen básicamente en instalaciones para
alumbrado e instalaciones para fuerza. En este capítulo se tratarán los aspectos
fundamentales de las instalaciones para fuerza.
Algunos requisitos básicos que deben reunir las instalaciones de este tipo, son las siguientes:
SEGURIDAD.- Deben satisfacerse todos los requisitos establecidos en las Normas Oficiales
Mexicanas para Instalaciones Eléctricas NOM-001, a fin de evitar sobrecalentamientos,
deterioros del aislamiento y caídas excesivas de voltaje.
CONDICIONES DE OPERACIÓN.- Para que la operación de un motor sea satisfactoria, la
caída de voltaje total desde la entrada del edificio o desde la subestación hasta el motor, no
debe exceder del 5%. En el caso de motores grandes de corriente alterna el cálculo de la
caída de voltaje debe tomar en cuenta la resistencia y la reactancia de los conductores y el
factor de potencia real del motor. Si se desconoce éste, se deberá considerar el valor de
0.85.
Para aparatos de calefacción, hornos secadores, etc. la caída de voltaje no debe exceder de
un 3% para no disminuir en forma apreciable la capacidad calorífica del aparato.
FLEXIBILIDAD.- En una planta industrial hay cambios frecuentes en la localización de los
motores. Al diseñar la instalación hay que tomar en cuenta la posibilidad de futuros cambios.
Para prever esto se recomiendan las siguientes canalizaciones:
a).- Instalación visible en tubo conduit con la utilización de condulets.
b).- Instalación visible en ductos o charolas.
PREVISIÓN PARA AUMENTOS DE CARGA.- Conviene diseñar la instalación eléctrica de
tal forma que puedan absorberse futuras ampliaciones. Si esto no es posible, conviene
cuando menos dejar suficiente espacio en la canalización para poder incorporar nuevos
circuitos.
9.2 DISPOSICIONES MÁS IMPORTANTES DE LAS NORMAS OFICIALES NOM-001
ARTÍCULO 430.- MOTORES, CIRCUITOS DE MOTORES Y SUS CONTROLES
430-14 LOCALIZACIÓN DE LOS MOTORES
a) Ventilación y mantenimiento. Los motores deben ubicarse de manera que tengan una
ventilación adecuada y que el mantenimiento tal como lubricación de soportes y
reemplazo de escobillas pueda hacerse fácilmente.
b) Motores abiertos. Los motores abiertos que tienen conmutadores o anillos colectores,
deben ser localizados o estar protegidos de manera que las chispas no puedan alcanzar
edmundo gutiérrez vera d. r.
2. _________________________________Capítulo 9______________________________ 175
los materiales combustibles adyacentes, pero esto no prohíbe la instalación de estos
motores sobre pisos o soportes de madera.
430-16 DEPÓSITO O ACUMULACIONES DE POLVO. En lugares donde el polvo o el
material que flote en el ambiente pueda depositarse sobre el motor o dentro del mismo en
cantidades tales que afecten seriamente su ventilación o enfriamiento y por consiguiente
puedan originar temperaturas peligrosas, se emplearán motores tipo cerrado que no se
sobrecalienten al trabajar en estas condiciones.
CONDUCTORES PARA CIRCUITOS DE MOTORES
430-22 UN SOLO MOTOR.- Los conductores derivados para alimentar un sólo motor
deberán tener una capacidad no menor al 125% de la corriente nominal del motor a plena
carga.
Para un motor de varias velocidades, los conductores del circuito derivado de alimentación al
controlador, deben seleccionarse tomando como base la corriente eléctrica nominal más alta
indicada en la placa del motor; para seleccionar los conductores en el circuito derivado entre
el equipo de control y el motor, debe tomarse como base la corriente eléctrica nominal de los
devanados que los conductores energizan.
b) Servicio no continuo. Los conductores que alimenten un motor que se utilice por corto
tiempo, en forma intermitente, periódica o haciendo variar su carga, deben tener una
capacidad de conducción de corriente no menor que la indicada en la Tabla 430-22 (b), a
menos que sea autorizado el utilizar un conductor de tamaño nominal menor.
TABLA 430-22 (a) PORCENTAJES PARA LA SELECCIÓN DE CONDUCTORES
ALIMENTADORES A MOTORES QUE NO OPEREN EN SERVICIO CONTINUO.
% DE LA CORRIENTE NOMINAL INDICADA EN LA PLACA
CLASIFICACIÓN DEL RÉGIMEN DE TRABAJO DE DISEÑO DEL MOTOR
SERVICIO
5 MINUTOS 10 MINUTOS 30 Y 60 MIN. SER.CONT.
DE CORTO TIEMPO:
Accionamiento de válvulas,
ascenso y descenso de rodillos 110 120 150 --
SERVICIO INTERMITENTE:
Ascensores y montacargas,
máquinas herramientas, bombas,
puentes levadizos, mesas
giratorias, etc. 85 85 90 140
SERVICIOS PERIÓDICOS:
Rodillos, equipos para manejo de
minerales y carbón, etc. 85 90 95 140
TRABAJO VARIABLE: 110 120 150 200
Cualquier motor debe considerarse de servicio continuo, a menos que la naturaleza del
aparato eléctrico que acciona, sea tal que el motor no opere continuamente con carga bajo
cualquier condición de operación.
edmundo gutiérrez vera d. r.
3. _________________________________Capítulo 9______________________________ 176
430-24. VARIOS MOTORES O MOTOR(ES) Y OTRA(S) CARGA(S). Los conductores que
suministren energía eléctrica a varios motores o a motores y otras cargas, deben tener una
capacidad de conducción de corriente, cuando menos de la suma de las corrientes a plena
carga nominales de todos los motores, más un 25% de la corriente nominal del motor de
mayor corriente del grupo, más la corriente nominal de las otras cargas determinadas de
acuerdo con lo indicado en el Artículo 220 y otras Secciones aplicables.
430-26. FACTOR DE DEMANDA PARA EL ALIMENTADOR. Cuando resulte un
calentamiento reducido en los conductores de los motores que operen por ciclos o en forma
intermitente o cuando los motores no operen al mismo tiempo, se permite que los
alimentadores tengan una capacidad de conducción de corriente menor que la especificada
en 430-24, pero condicionado a que los conductores tengan suficiente capacidad de
conducción de corriente para la carga máxima determinada de acuerdo con el tamaño y
número de los motores a alimentar y las características y régimen de trabajo de las cargas.
Para efectos de aprobación, será necesario presentar el estudio de ingeniería que demuestre
fehacientemente la carga máxima a que se someterán los conductores.
430-27. MOTORES CON CAPACITORES. Cuando se instalen capacitores en los circuitos de
los motores, los conductores eléctricos deben cumplir con lo establecido en 460-8 y 460-9.
PROTECCIÓN DE SOBRECARGA DE MOTOR Y CIRCUITOS DERIVADOS
430-32. MOTORES DE SERVICIO CONTINUO
a) De más de 746 W (1 CP). Cada motor de servicio continuo de más de 746 W (1 CP) debe
protegerse contra sobrecarga por uno de los medios siguientes:
1) Un dispositivo separado de sobrecarga que sea sensible a la corriente eléctrica del motor.
La corriente eléctrica nominal o de disparo de este dispositivo no debe ser mayor que los por
cientos de la corriente de placa a plena carga del motor, como sigue:
- Motores con factor de servicio indicado no menor que 1,15 125%
- Motores con indicación de elevación de temperatura no mayor que 40° C 125%
- Todos los demás motores 115%
Este valor puede ser modificado según lo permitido por la Sección 430-34.
Para un motor de varias velocidades, cada conexión del devanado debe ser considerada por
separado.
Cuando el dispositivo de sobrecarga separado del motor esté conectado de manera que no
conduzca la corriente eléctrica total indicada en la placa de características del motor, tal
como es el caso de arranque en estrella-delta, se debe indicar en el equipo el valor de ajuste
apropiado de disparo del dispositivo de protección o debe considerarse la tabla que el
fabricante proporcione para su selección.
NOTA: Cuando se utilizan capacitores para corregir el factor de potencia, y son instalados en
el lado de la carga, entre el motor y el dispositivo de sobrecarga, véase 460-9.
2) Una protección térmica integrada al motor y aprobada para este uso con el motor que
protege, debe prevenir los daños por sobrecalentamiento del motor, así como por fallas en el
arranque. La corriente eléctrica de disparo de la protección térmica del motor no debe
exceder de los siguientes valores en por ciento sobre los valores de corriente eléctrica a
plena carga de los motores que se indican en las Tablas 430-148 y 430-150:
- Motor a carga plena cuya corriente eléctrica sea menor 9 A 170%
- Motor a carga plena con corriente eléctrica de operación entre 9,1 A y 20 A 156%
edmundo gutiérrez vera d. r.
4. _________________________________Capítulo 9______________________________ 177
- Motor a carga plena con corriente eléctrica de operación mayor que 20 A 140%
Si el dispositivo de interrupción de corriente se encuentra separado del motor y el circuito de
control es operado por la protección integral del motor, debe estar arreglado en forma tal que
cuando abra la protección del motor, también abra el circuito de control.
3) Se permite un dispositivo de protección integrado al motor de tal forma que lo proteja
contra daños en una falla de arranque, siempre y cuando el motor sea parte integrante de un
ensamble aprobado que normalmente no sujete al motor a sobrecargas.
4) En motores mayores a 1 120 kW (1 500 CP) se requiere de un dispositivo de protección
con sensores de temperatura, en contacto con el devanado, que provoquen una interrupción
de la corriente eléctrica al motor, cuando se presente un incremento mayor al que se indica
en la placa del motor, sobre un ambiente de 40° C.
b) Motores de 746 W (1 CP) y menores, con arranque no automático
1) Un motor que opere en servicio continuo de capacidad de 746 W (1 CP) o menor que no
esté instalado en forma permanente, con arranque no automático y que esté a la vista de su
controlador, se permite considerarlo protegido contra sobrecarga por el dispositivo de
protección contra cortocircuito y de falla a tierra del circuito derivado. Este dispositivo no
deberá ser mayor que lo que se especifica en la Parte D del Artículo 430.
2) Cualquiera de estos motores que no esté a la vista del control debe protegerse de acuerdo
con lo especificado en 430-32 (c).
Cualquier motor de 746 W (1 CP) o menor que esté instalado en forma permanente, debe
estar protegido de acuerdo con lo especificado en 430-32 (c).
c) Motor de 746 W (1 CP) o menor, con arranque automático. Cualquier motor de 746 W
(1 CP) o menor, con arranque automático, debe protegerse contra sobrecarga por uno de los
siguientes medios:
1) Un dispositivo de sobrecarga separado que responda a la corriente eléctrica del motor.
Este dispositivo debe seleccionarse para que desconecte o tenga como máximo su
capacidad nominal de acuerdo con los siguientes por cientos de la corriente eléctrica de
placa a plena carga del motor:
- Motores con factor de servicio indicado no menor que 1,15 125%
- Motores con indicación de elevación de temperatura no mayor que 40° C 125%
- Todos los demás motores 115%
Para motores de varias velocidades cada conexión de los devanados debe considerarse en
forma separada. Las modificaciones a estos valores deben estar de acuerdo con lo indicado
en 430-34.
2) Una protección térmica integrada al motor y aprobada para ser usada con el motor que
protege contra sobrecalentamiento peligroso debido a sobrecarga o falla en el arranque. Si el
dispositivo de interrupción de corriente del motor se encuentra separado del mismo y su
circuito de control se acciona por un dispositivo protector que forma parte integral del motor,
debe disponerse de tal forma que la desconexión del circuito de control interrumpa la
corriente eléctrica del motor.
3) Se permite proteger al motor con un dispositivo de protección que forme parte integral del
motor y que puede proteger al motor contra sobrecargas y fallas en el arranque si:
(1) el conjunto es parte de un conjunto aprobado que no someta al motor a sobrecargas.
(2) el conjunto está equipado también con otros controladores de seguridad (como el
controlador de seguridad de combustión de un quemador de petróleo doméstico), que proteja
al motor contra daños debidos a fallas en el arranque. Cuando el conjunto tenga
controladores de seguridad que protejan al motor, debe indicarse en la placa de
especificaciones en un lugar visible incluso después de instalado.
edmundo gutiérrez vera d. r.
5. _________________________________Capítulo 9______________________________ 178
4) Si la impedancia de los devanados del motor es suficiente para prevenir el
sobrecalentamiento por fallas en el arranque, se permite proteger al motor como se
especifica en 430-32(b)(1) para motores que se arranquen en forma manual, si el motor
forma parte de un conjunto ensamblado de fábrica y el motor se limita a sí mismo para no
sobrecalentarse en forma peligrosa.
NOTA: Muchos motores de corriente alterna menores a 37 W (1/20 CP), como son motores
de relojes, motores tipo serie, etc., y también algunos de mayor capacidad como los de alto
par, deben incluirse en esta clasificación. Esto no incluye a motores de fase partida, que
tienen desconectador automático que desconectan las bobinas de arranque.
d) Motores de rotor devanado. A los circuitos secundarios de los motores de c.a. de rotor
devanado, incluyendo sus conductores, controles, resistencias, etc., se permite considerarlos
protegidos contra sobrecargas por el mismo dispositivo de protección de sobrecarga del
motor.
PROTECCIÓN DEL CIRCUITO DERIVADO DEL MOTOR CONTRA CORTOCIRCUITOS Y
FALLAS A TIERRA
430-52. CAPACIDAD NOMINAL O AJUSTE PARA LOS CIRCUITOS DE UN SOLO
MOTOR
a) General. El dispositivo de protección contra cortocircuitos y fallas de tierra de circuitos
derivados para motores, debe cumplir con (b) y con (c) o (d) cuando sean aplicables.
b) Todos los motores. La protección del circuito derivado contra cortocircuito y falla a tierra
debe ser capaz de soportar la corriente eléctrica de arranque del motor.
c) Capacidad nominal o ajuste.
1) Debe utilizarse un dispositivo de protección, con una capacidad nominal o ajuste,
seleccionado de tal forma que no exceda los valores dados en la Tabla 430-152.
Excepción 1: Cuando los valores determinados por la Tabla 430-152 para los dispositivos de
protección contra cortocircuito y falla de tierra no correspondan a los tamaños o capacidades
nominales de los fusibles, interruptores automáticos no ajustables o dispositivos térmicos de
protección o posibles ajustes de interruptores automáticos, se permite el tamaño, capacidad
o ajuste inmediato superior.
Excepción 2: Cuando los valores especificados por la Tabla 430-152 no son suficientes para
la corriente eléctrica de arranque de motor:
a. La capacidad nominal de un fusible del tipo sin retardo y no mayor que 600 A puede
aumentarse, pero en ningún caso debe exceder 400% de la corriente eléctrica del motor a
plena carga
b. La capacidad nominal de un fusible con retardo de tiempo (doble elemento) puede ser
aumentada, pero en ningún caso debe exceder de 225% de la corriente eléctrica a plena
carga.
c. El ajuste de un interruptor automático de tiempo inverso puede aumentarse, pero en
ningún caso debe excederse (1) 400% de la corriente eléctrica a plena carga del motor de
100 A o menos o (2) 300% para corriente eléctrica a plena carga de 100 A o mayor.
d. La capacidad nominal de un fusible clasificado entre 601 A a 6 000 A puede ser
aumentada, pero en ningún caso debe exceder el 300% de la corriente eléctrica del motor a
plena carga.
NOTA: Véase 240-6 para capacidades nominales de fusibles o interruptores automáticos.
2) Cuando la capacidad nominal del dispositivo de protección de un circuito derivado contra
cortocircuitos y fallas a tierra esté indicada en una tabla de protecciones contra sobrecarga
de un fabricante, para ser usada con un controlador de motor o esté marcada en el equipo,
edmundo gutiérrez vera d. r.
6. _________________________________Capítulo 9______________________________ 179
estos valores de capacidad no deben ser excedidos, aun cuando sean permitidos mayores
valores en las disposiciones anteriores.
3) Sólo se permite utilizar un interruptor automático de disparo instantáneo si es ajustable y
forma parte de una combinación aprobada y listada de motor y controlador con protección
coordinada del motor contra sobrecargas, cortocircuitos y fallas a tierra en cada conductor, y
si el valor de disparo se ajusta para que no supere lo especificado en la Tabla 430-152. Se
permite un protector del motor contra cortocircuitos en lugar de los dispositivos de la Tabla
430-152, si ese protector forma parte de una combinación aprobada y listada de motor y
controlador con protección coordinada del motor contra sobrecargas, cortocircuitos y fallas a
tierra en cada conductor que abra el circuito cuando la corriente eléctrica supere 1 300% de
la nominal a plena carga.
NOTA: Para los fines de este Artículo, los interruptores automáticos de disparo instantáneo
pueden incorporar un medio para permitir la corriente transitoria del motor, para evitar los
inconvenientes del disparo del interruptor automático.
Excepción 1: Cuando el valor especificado en la Tabla 430-152 no sea suficiente para la
corriente eléctrica de arranque del motor, se permite aumentar el valor de disparo
instantáneo del interruptor automático pero sin que en ningún caso supere 1 300% de la
corriente eléctrica del motor a plena carga para motores distintos de los del diseño E, ni 1
700% para los motores para diseño E. Se permite que el valor de disparo de los interruptores
automáticos sea superior a 800% para motores distintos de los de diseño E y superior a 1
100% para los motores diseño E, cuando esos valores sean necesarios según se demuestre
con una evaluación de ingeniería. En tales casos no será necesario aplicar primeramente la
restricción de disparo a 800% o a 1 100%.
Excepción 2: Cuando la intensidad del motor a plena carga sea de 8 A o menos se permite
aumentar hasta el valor marcado en el controlador el valor de disparo instantáneo del
interruptor automático con una capacidad nominal continua de 15 A o menos en una
combinación aprobada y listada del motor y del controlador que ofrezca protección
coordinada del circuito derivado del motor contra sobrecargas y cortocircuitos y fallas a tierra.
4) En motores de varias velocidades se permite instalar un solo dispositivo de protección
contra cortocircuitos y fallas a tierra para dos o más de los devanados del motor, siempre que
el valor nominal del dispositivo de protección no supere los por cientos anteriores sobre la
capacidad nominal del devanado protegido más pequeño, según la placa de datos.
Excepción: En un motor de varias velocidades se permite utilizar un solo dispositivo de
protección contra cortocircuitos y fallas a tierra, de valor nominal según la capacidad a plena
carga del devanado de mayor intensidad, si cada devanado está equipado con protección
individual contra sobrecargas de valor nominal de acuerdo con la capacidad a plena carga y
si los conductores del circuito derivado que suministran energía a cada devanado, son de
una intensidad nominal acorde con la capacidad a plena carga del devanado de mayor
capacidad a plena carga.
5) En los sistemas de controladores de motores de estado sólido electrónicos, se permite
utilizar fusibles adecuados en lugar de los dispositivos de la Tabla 430-152, siempre que al
lado de los fusibles se marque claramente el valor nominal de los fusibles de repuesto.
d) Motores de alto par. Los circuitos para los motores de alto par deben protegerse a la
capacidad nominal que aparezca en la placa de datos del motor, según lo indicado en
240-3(b).
edmundo gutiérrez vera d. r.
7. _________________________________Capítulo 9______________________________ 180
PROTECCIÓN DEL ALIMENTADOR DEL MOTOR, CONTRA CORTOCIRCUITOS Y
FALLAS A TIERRA
430-62. CAPACIDAD O AJUSTE (CARGA DE MOTORES)
a) Carga específica. Un circuito alimentador que suministra energía a una carga fija y
específica de motores cuyos conductores tienen tamaño nominal basado en 430-24, debe
estar provisto de un dispositivo de protección de valor nominal o ajuste no mayor que la
capacidad o ajuste del mayor de los dispositivos de protección de circuitos derivados contra
cortocircuito y falla a tierra de cualquiera de los motores del grupo, más la suma de las
corrientes a plena carga de los otros motores del grupo (selección basada en la Tabla
430-152 o en 440-22(a) para compresores de motores herméticos refrigerantes). Si dos o
más circuitos derivados del grupo poseen dispositivos contra cortocircuitos y fallas a tierra de
igual capacidad o ajuste, se considera a uno solo de ellos como el mayor para los cálculos
anteriores.
Tabla 430-152.- Valor nominal máximo o ajuste para el dispositivo de protección
contra cortocircuito y falla a tierra del circuito derivado del motor
Por ciento de la corriente eléctrica a plena carga
Fusible sin Fusible de dos Interruptor Interruptor
Tipo de motor retardo de elementos** automático automático
tiempo** (con retardo de de disparo de tiempo
tiempo) instantáneo inverso*
Motores 300 175 800 250
monofásicos
Motores de CA, poli -
fásicos, que no sean
de rotor devanado.
Jaula de ardilla 300 175 800 250
Otros que no sean
diseño E 300 175 1 100 250
Diseño E
Motores síncronos + 300 175 800 250
Rotor devanado 150 150 800 250
c.c. (tensión eléctrica 150 150 250 150
constante)
Para ciertas excepciones a los valores especificados, véase 430-52 hasta 430-54.
* Los valores dados en la última columna comprenden también las capacidades de los
tipos no ajustables de tiempo inverso, los cuales pueden modificarse como se indica
en 430-52.
** Los valores en la columna para fusible sin retardo de tiempo aplican para fusibles
Clase CC con retardo de tiempo.
+ Los motores síncronos de bajo par de arranque y baja velocidad (comúnmente 450
RPM o menos), como son los empleados para accionar compresores reciprocantes,
bombas, etc., que arrancan en vacío, no requieren una capacidad de fusible o un
ajuste mayor que 200% de la corriente eléctrica a plena carga.
CAPACITORES
edmundo gutiérrez vera d. r.
8. _________________________________Capítulo 9______________________________ 181
460-8. CONDUCTORES
a) Capacidad de conducción de corriente. La capacidad de conducción de corriente de los
conductores del circuito de los capacitores no debe ser menor que 135% de la corriente
eléctrica nominal del capacitor. La capacidad de conducción de corriente de los conductores
que conectan un capacitor a las terminales de un motor o a los conductores de circuito del
motor, no debe ser menor que 1/3 de la capacidad de conducción de corriente de los
conductores del circuito del motor y nunca menor que 135% de la corriente eléctrica nominal
del capacitor.
b) Protección contra sobrecorriente
1) En cada conductor de fase debe colocarse un dispositivo de protección contra
sobrecorriente para cada banco de capacitores.
Excepción: Un capacitor conectado en el lado de la carga de un dispositivo contra
sobrecarga de un motor no requiere otro dispositivo contra sobrecorriente.
2) La capacidad o ajuste del dispositivo de protección contra sobrecorriente debe ser tan bajo
como sea factible.
c) Medios de desconexión
1) Cada conductor de fase debe estar provisto de un medio de desconexión para cada banco
de capacitores.
Excepción: Cuando un capacitor está conectado del lado de la carga de un dispositivo de
protección contra sobrecarga del motor.
2) El medio de desconexión abre simultáneamente todos los conductores de fase.
3) El medio de desconexión permite desconectar el capacitor de la línea como una maniobra
normal.
4) La capacidad de corriente del medio de desconexión no debe ser menor que 135% de la
corriente eléctrica nominal del capacitor.
9.3 LETRAS CLAVE PARA MOTORES Y CORRIENTES NOMINALES
La Asociación Nacional de Fabricantes de Aparatos Eléctricos de EE.UU. (NEMA) ha
adoptado letras clave con las cuales se indica la potencia tomada por el motor con rotor
bloqueado en KVA/HP y la cual depende de la reactancia del motor y determina su corriente
de arranque.
En la tabla siguiente se proporcionan las letras clave o código de los motores y la potencia a
rotor bloqueado que toman ellos:
TABLA 9.1 LETRAS CLAVE A ROTOR BLOQUEADO
LETRAS CLAVE KVA/HP A ROTOR LETRAS CLAVE KVA/HP A ROTOR
BLOQUEADO BLOQUEADO
A 0.00 A 3.14 L 9.00 A 9.99
B 3.15 A 3.54 M 10.00 A 11.19
C 3.55 A 3.99 N 11.20 A 12.49
D 4.00 A 4.49 P 12.50 A 13.99
E 4.50 A 4.99 R 14.00 A 15.99
F 5.00 A 5.59 S 16.00 A 17.99
G 5.60 A 6.29 T 18.00 A 19.99
H 6.30 A 7.09 U 20.00 A 22.39
J 7.10 A 7.99 V MAS DE 22.39
edmundo gutiérrez vera d. r.
9. _________________________________Capítulo 9______________________________ 182
K 8.00 A 8.99
La letra clave o letra código como también se le conoce, será utilizada para seleccionar la
protección contra cortocircuitos y fallas a tierra de los circuitos derivados que alimentan uno o
más motores.
CORRIENTE NOMINAL DE LOS MOTORES ELÉCTRICOS
La corriente nominal de un motor eléctrico es la corriente que demanda cuando está
trabajando a plena carga o sea, a su potencia nominal. Esta corriente es considerablemente
menor que la corriente de arranque que es la que demanda el motor cuando inicia su
operación y la cual, como antes se mencionó, depende de su reactancia y se identifica con
las letras claves dadas en la tabla anterior.
TABLA 9.2 FÓRMULAS PARA DETERMINAR LA CORRIENTE NOMINAL DE LOS
MOTORES
CORRIENTE DIRECTA C. A. UNA FASE C. A. DOS FASES C. A. TRES FASES
l = HP * 746 HP * 746__ HP * 746__ HP * 746____
E * %ef E * %ef * F.P. 2E * %ef * F.P. 1.73 E * %ef * F.P.
l = KW * 1000 KW * 1000 KW * 1000 KW * !000
E E * F.P. 2E * F.P. 1.73 E * F.P.
l = KVA * 1000 KVA * 1000 KVA * 1000
E 2E 1.73 E
KW = l * E l * E * F.P. l * 2E * F.P. l * 1.73 E * F.P.
1000 1000 1000 1000
KVA = l * E l * 2E l * 1.73 E
1000 1000 1000
HP = l * E * %ef l * E * %ef * F.P. l * 2E * %ef * F.P. l *1.73E* %ef * F.P.
746 746 746 746
Dado que las corrientes a plena carga de los motores serán usadas constantemente, para
facilidad de consulta, al final de este texto e identificadas como tablas No. 14, 15 y 16 se
proporciona esta información para los diferentes tipos de motores.
EJEMPLO.- Calcular para un motor trifásico de inducción, de 5 HP, 60 hertz, 220 volts y letra
de clave H, lo siguiente:
a) La mínima y máxima corriente de arranque.
b) La corriente normal de operación a plena carga.
c) La máxima corriente de arranque como una relación de la corriente a plena carga.
Letra clave H: 6.30 a 7.09 KVA/HP. (Tabla. 9.1)
Por lo tanto KVAmín = 6.30 * 5 = 31.50 KVA
KVAmáx = 7.09 * 5 = 35.45 KVA
Corrientes mínima y máxima durante el arranque:
I = KVA__
1.73 * KV
edmundo gutiérrez vera d. r.
10. _________________________________Capítulo 9______________________________ 183
Imín = 31.50 = 82.70 amperes
1.73 * 0.220
Imáx = 35.45 = 93.03 amperes
1.73 * 0.220
En la tabla No. 12 se observa que la corriente a plena carga de un motor trifásico, 220 volts,
5 HP, es de 15 amperes. La máxima corriente de arranque referida a la corriente a plena
carga será entonces:
Imáx = 93.03 = 6.2
Ipc 15
Es decir, la máxima corriente de arranque es 6.2 veces mayor que la corriente a plena carga
del motor.
edmundo gutiérrez vera d. r.
12. _________________________________Capítulo 9______________________________ 185
9.4 DESCRIPCIÓN DE LOS DIFERENTES ELEMENTOS DEL CIRCUITO DERIVADO DE
UN MOTOR
"A".- ALIMENTADOR. Es el conjunto de conductores que alimenta a un grupo de motores
eléctricos. Su calibre se calcula con la siguiente expresión:
I = 1.25 Ipc motor mayor + Suma Ipc resto motores
La expresión anterior es válida si todos los motores son de servicio continuo. Si uno o más
motores del grupo no trabajan en esta forma, los conductores pueden calcularse de acuerdo
con lo que establece la sección 430-24 de las Normas Oficiales Mexicanas para
Instalaciones Eléctricas NOM-001-SEDE.
"B".- PROTECCIÓN DEL ALIMENTADOR. Este dispositivo tiene por objeto proteger al
conductor contra sobrecargas y cortocircuitos. Puede ser a base de fusibles o interruptores
automáticos. Su capacidad no debe exceder la protección del circuito derivado del motor de
mayor capacidad más la suma de las corrientes a plena carga del resto de los motores.
I = Iprot.C.D.motor mayor + Σ Ipc resto motores
"C".- DESCONECTADOR. Tiene por objeto aislar el motor del circuito derivado para poder
realizar mantenimientos o ajustes sin peligro de descargas eléctricas. Generalmente este
dispositivo es un interruptor automático que sea capaz de abrir la máxima corriente de
sobrecarga del motor o bien, un interruptor de navajas el cual para motores de más de 2 HP
deberá abrir invariablemente sin carga. El desconectador debe tener una capacidad para
conducir continuamente por lo menos, un 15% más de la corriente a plena carga del motor.
I = 1.15% Ipc motor
"D".- CONDUCTORES CIRCUITO DERIVADO. Es el conjunto de conductores que van
desde el tablero de distribución o del alimentador a cada motor. Si el motor es de servicio
continuo, el calibre de los conductores se determina aplicando la siguiente expresión:
I = 1.25 Ipc motor
Si al mismo circuito derivado se conectan dos o más motores de servicio continuo, el calibre
se determina mediante la expresión:
I = 1.25 Ipc motor mayor + Σ Ipc resto motores
"E".- PROTECCIÓN CIRCUITO DERIVADO. Esta protección es para el conductor del
circuito derivado y no para el motor. Debe tener la capacidad suficiente para absorber la
corriente de arranque del motor sin que se abra el circuito. Se selecciona de acuerdo con
tablas dadas por los fabricantes o bien, considerando el sistema de arranque del motor de
que se trate y su letra clave que nos indica la potencia en KVA por cada HP que toman los
motores a rotor bloqueado. Los dos factores antes mencionados se proporcionan en la tabla
No. 17 que aparece al final de este texto.
edmundo gutiérrez vera d. r.
13. _________________________________Capítulo 9______________________________ 186
"F".- PROTECCIÓN DEL MOTOR. Tiene por objeto proteger al motor contra sobrecargas.
Se selecciona para una corriente superior en un 25% a la corriente a plena carga del motor.
Si el dispositivo que se seleccione de acuerdo con el criterio anterior no soporta la corriente
de arranque o no corresponde a un tamaño normalizado, puede utilizarse el tamaño
inmediato superior siempre que no sea mayor del 140% de la corriente a plena carga del
motor.
En la tabla No. 18 al final de este texto, se proporcionan las características de dispositivos de
protección contra sobrecargas para los motores.
"G".- CONTROL DEL MOTOR. Es el dispositivo que sirve para arrancar y parar la operación
del motor y dependerá del tipo y de la capacidad de éste. Puede ser un simple interruptor de
navajas o termo magnético para motores de pequeña capacidad o puede ser un arrancador a
tensión plena o a tensión reducida.
Por lo que se refiere a estos últimos, se pueden tener arrancadores con resistencias o
reactancias en el primario del motor, con auto transformadores de operación manual
(autostarter) o automática, arrancadores para motores con devanado bipartido o con
conexión estrella - delta, etc. Cualquier tipo de arrancador o controlador que se instale, debe
ser capaz de poder interrumpir la corriente a rotor bloqueado.
"H".- CONTROL SECUNDARIO DEL MOTOR. Se utiliza en los motores de rotor devanado y
consiste en un reóstato que se conecta al devanado del rotor a través de anillos rozantes. Al
arrancar el motor se ponen todas las resistencias en serie y se van cortocircuitando poco a
poco hasta que el motor adquiere su velocidad nominal.
"J".- ESTACIÓN DE BOTONES. Se emplea para el control remoto del motor. Pueden usarse
cuando los controladores son de operación magnética cuyos contactos pueden abrirse o
cerrarse mediante una señal eléctrica que conviene generar desde una estación remota.
Con todas las disposiciones señaladas en párrafos anteriores y los diferentes temas que se
han estudiado hasta este punto, se cuenta ya con los elementos necesarios para desarrollar
una instalación eléctrica de fuerza.
Para reafirmar los conceptos correspondientes, se desarrollan a continuación varios ejemplos
sobre el particular.
EJEMPLO.- Se tienen tres motores con las características que se dan a continuación.
Determinar el tipo de aislamiento y calibre de los conductores de los circuitos derivados y del
alimentador, protección de los circuitos derivados y del alimentador con interruptores termo
magnéticos, protección contra sobrecarga de los motores y diámetros de la tubería conduit,
considerando que cada circuito derivado va en su propia canalización. El ambiente es
húmedo y hay contaminación de productos químicos, No se instalará conductor de tierra.
edmundo gutiérrez vera d. r.
14. _________________________________Capítulo 9______________________________ 187
C O N C E P T O MOTOR 1 MOTOR 2 MOTOR 3
Potencia en HP 25 30 10
Tipo de rotor JA RD JA
Tipo de arranque AT CS TP
Letra clave B -- B
Número de fases 3 3 3
Voltaje 440 440 440
Corriente a plena carga (tabla 16) 32 39 14
1.25 * Ipc 40 48.8 17.5
Calibre conductor THWN (tabla 6) 8 8 12
Diámetro tubería mm (tabla 9) 13 13 13
Factor en por ciento (tabla 17) 200 150 200
Factor * Ipc 64 59 28
Tamaño int. termo magnético (tabla 13) 70 70 30
Protección sobrecarga motor (1.25 Ipc) 40 48.8 17.5
Elemento térmico (tabla 18) 41.8 55.1 18.8
CLAVES: JA = Jaula de ardilla ; RD = Rotor devanado ; AT = Auto transformador
CS = Control secundario TP = Tensión plena
AMPACIDAD DEL ALIMENTADOR: 1.25 * 39 + 32 + 14 = 94.75 amperes
CONDUCTOR: THWN No. 2 AWG
DIÁMETRO TUBERÍA CONDUIT: 25 mm
CORRIENTE PROTECCIÓN ALIMENTADOR: 70 + 32 + 14 = 116 amperes
SE INSTALARA UN INTERRUPTOR TERMOMAGNETICO DE 100 AMPERES
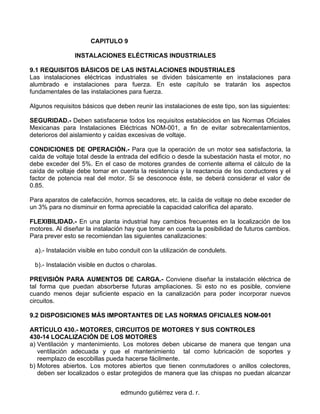
Figura 9.2 Diagrama unifilar de la instalación de fuerza anterior.
EJEMPLO.- Desarrollar la instalación de fuerza de la nave industrial cuyo croquis se muestra
a continuación. La tubería será de acero galvanizado de pared gruesa, la protección de los
circuitos derivados y del alimentador será con interruptores termomagnéticos, la protección
edmundo gutiérrez vera d. r.
15. _________________________________Capítulo 9______________________________ 188
contra sobrecarga de los motores será con relevadores térmicos, el ambiente es húmedo y
contaminado. La temperatura ambiente es de 30° C.
Figura 9.3 Croquis de la instalación de fuerza de una nave industrial.
Localización ideal del centro de carga. Tomando los ejes A y B como referencia se tendrá:
Lx = 5*10 + 3*20 + 3*40 + 3*50 + 10*20 + 15*40 = 30.25 m
39
Ly = 5*20 + 3*20 + 3*20 + 3*20 + 10*10 + 15*10 = 13.59 m
39
C O N C E P T O M 1 M 2 M 3 M 4 M 5 M 6
Potencia en HP 5 3 3 3 10 15
Tipo de rotor JA JA JA JA RD RD
Tipo de arranque TP TP TP TP CS CS
Letra clave A C C C -- --
Número de fases 3 3 3 3 3 3
Voltaje 220 220 220 220 220 220
Corriente a plena carga (tabla 16) 15 9 9 9 27 40
1.25 * Ipc 18.8 11.3 11.3 11.3 33.8 50
Factor en % (tabla 17) 150 200 200 200 150 150
Factor * Ipc 22.5 18 18 18 40.5 60
Tamaño int. termomagnético (tabla 13) 30 20 20 20 40 70
3 conductores de fase THWN 12 14 14 14 8 8
1 conductor de tierra (+) 12 14 14 14 10 10
Prot. sobrecarga del motor 18.8 11.3 11.3 11.3 33.8 50
Elemento térmico (tabla 18) 18.8 11.9 11.9 11.9 36.6 55.1
NOTAS (+): De acuerdo con la sección 430-142 de las Normas Oficiales NOM-001-SEDE se
requiere que las carcazas de los motores estén conectadas a tierra. Por lo tanto, para cada
motor se llevarán tres conductores de fase más un conductor de puesta a tierra cuyo calibre
edmundo gutiérrez vera d. r.
16. _________________________________Capítulo 9______________________________ 189
se determina de acuerdo con la tabla 250-95 de las propias Normas Oficiales. Este conductor
de puesta a tierra se llevará hasta la barra de neutro del tablero de distribución.
En los tramos de canalización donde se llevan 7 conductores (6 activos y 1 de tierra), de
acuerdo con los factores de agrupamiento especificados en las Normas Oficiales, debe
considerarse únicamente el 80% de la ampacidad de los conductores. Aplicando esta
disposición, la capacidad de conducción de corriente de los conductores calibre 12 se reduce
de 20 a 16 amperes y la de los calibre 14 de 15 a 12 amperes. Como la corriente a plena
carga del motor 1 es de 15 amperes y de 9 la de los motores 2, 3 y 4 y, estos valores son
inferiores a la ampacidad corregida de los conductores, se concluye que la selección de
estos elementos es la correcta.
CORRIENTE EN EL ALIMENTADOR
Ialim = 1.25 * 40 + 15 + 9 + 9 + 9 + 27 = 119 amperes
Se instalarán 3 conductores. THWN 1/0 para las tres fases. La máxima corriente de
desbalance que puede circular por el neutro es si falla una de las fases; es decir, 40 + 15 +9
+9 + 9 + 27 = 109 amperes, por lo tanto y de acuerdo con la tabla 6, procede instalar un
conductor calibre 2 AWG para el neutro. El diámetro de la tubería conduit deberá ser de 38
mm.
PROTECCIÓN DEL ALIMENTADOR
Iprot.alim = 70 + 15 + 9 + 9 + 9 + 27 = 139 amperes
Se instalará un ITM de 3 polos y 125 amperes de capacidad nominal.
En la figura 9.3 se encuentra el croquis de la instalación eléctrica de fuerza donde se indican
el número y calibre de los conductores que van en cada tramo de la canalización y, los
diámetros de la tubería para respetar los factores de relleno autorizados (tabla 9).
EJEMPLO.- Para el local industrial mostrado en la figura 9.4, proyectar la instalación
eléctrica de fuerza. La máxima caída de tensión permitida en los circuitos derivados es del
3% y del 2% en el alimentador que tiene una longitud total de 40 metros. Todos los motores
son trifásicos y de 220 volts. La tubería conduit es de acero galvanizado de pared gruesa, la
protección de los circuitos derivados y del alimentador será con interruptores
termomagnéticos y con relevadores térmicos la de sobrecarga de los motores. Existe
contaminación de agentes químicos y humedad y, la temperatura ambiente es de 30° C. La
altura del local es de 3.50 metros.
edmundo gutiérrez vera d. r.
17. _________________________________Capítulo 9______________________________ 190
Figura 9.4 Croquis de la instalación de fuerza de una nave industrial.
C O N C E P T O M1 M2 M3 M4 M5 M6 M7
Potencia en HP 5 5 10 3 7.5 15 20
Tipo de rotor JA JA JA JA JA RD RD
Tipo de arranque TP TP TP TP TP CS CS
Letra clave C C H J A -- --
Corriente a plena carga (tabla 16) 15 15 27 9 22 40 52
1.25 * Ipc 18.8 18.8 33.8 11.3 27.5 50 65
Factor en % (tabla 17) 200 200 250 250 150 150 150
Factor * Ipc 30 30 67.5 22.5 33 60 78
Capacidad I.T.M. (tabla 13) 30 30 70 30 40 70 100
3 conductores de fase THWN 12 12 8 14 10 8 6
1 conductor de tierra THWN (+) 12 12 10 14 10 10 8
Protección sobrecarga motor 18.8 18.8 33.8 11.3 27.5 50 65
Elemento térmico (tabla 18) 18.8 18.8 36.6 11.9 27.9 55.1 69.5
(+): De acuerdo con la sección 430-142 de las Normas Oficiales NOM-001-SEMP, por ser la
canalización metálica se requiere que las carcazas de los motores estén conectadas a tierra.
Por lo tanto, para cada motor se llevarán los tres conductores de fase más un conductor de
puesta a tierra cuyo calibre se determina de acuerdo con la tabla 250-95 de las propias
normas oficiales (página 134 de este texto). Este conductor de puesta a tierra se llevará
hasta la barra de neutro del tablero de distribución.
AMPACIDAD DEL ALIMENTADOR
Ialim = 1.25 * 52 + 15 + 15 + 27 + 9 + 22 + 40 = 193 amperes
Se requerirán tres conductores de fase THWN 3/0 AWG más un conductor para el neutro que
también será THWN 3/0 AWG ya que la corriente máxima de desbalance podrá ser de 180
amperes. El diámetro de la tubería conduit de acuerdo con la tabla 9 será de 51 mm.
edmundo gutiérrez vera d. r.
18. _________________________________Capítulo 9______________________________ 191
PROTECCIÓN DEL ALIMENTADOR
Iprot = 100 + 15 + 15 + 27 + 9 + 22 + 40 = 228 amperes
Se utilizará un interruptor termo magnético de 3 polos, marco LB y capacidad nominal de 225
amperes.
DETERMINACIÓN DEL ÁREA DE LA CANALIZACIÓN PRINCIPAL
En el primer tramo de la canalización principal deben alojarse 21 conductores activos y 7
hilos de tierra. De acuerdo con los factores de agrupamiento especificados en las Normas
Oficiales, al alojar 21 conductores activos en una sola tubería, su ampacidad debe reducirse
al 45% del valor considerado en tablas. Lo anterior obligaría a incrementar substancialmente
el calibre de los 21 conductores activos para respetar la disposición anterior. Como esto es
poco práctico, se pueden aplicar cualquiera de las dos opciones siguientes:
OPCIÓN 1.- Utilizar un ducto metálico donde se aplique un factor de relleno del 20% con lo
cual ya no es necesario, de acuerdo con las mismas Normas, considerar los factores de
agrupamiento. En este caso se tendría:
3 conductores THWN No. 6 * 34.20 mm2 = 102.60 mm2
7 conductores THWN No. 8 * 21.10 mm2 = 147.70 mm2
3 conductores THWN No. 10 * 12.30 mm2 = 36.90 mm2
6 conductores THWN No. 12 * 7.90 mm2 = 47.40 mm2
3 conductores THWN No. 14 * 5.80 mm2 = 17.40 mm2
T O T A L: 352.00 mm2
Con base en el área ocupada por los conductores, es factible utilizar un ducto de 60 x 60 mm
que proporciona una sección total de 3600 mm2 y una utilizable de 720 mm2, considerando
un factor de relleno del 20%.
OPCIÓN 2.- Alojar los conductores en varias tuberías. Se considerará en este caso, la
utilización de tres tubos para el primer tramo de la canalización. Los circuitos se distribuirán
como se indica a continuación:
TUBO 1: MOTORES 1 Y 7
3 conductores THWN No. 12 * 7.90 mm2 = 23.70 mm2
3 conductores THWN No. 6 * 34.20 mm2 = 102.60 mm2
1 conductor THWN No. 8 * 21.10 mm2 = 21.10 mm2
T O T A L: 147.40 mm2
___ _________
At = Ac = 147.40 = 368.50 mm2 ; d = / 4 A = / 4 * 368.50 = 21.66mm
Fr 0.4 √ Π √ 3.1416
Se usará tubería de 25mm de diámetro.
edmundo gutiérrez vera d. r.
19. _________________________________Capítulo 9______________________________ 192
Ipc del motor 1 = 15 A ; conductor No. 12: 20 A * 0.8 = 16 A (el conductor es adecuado)
Ipc del motor 7 = 52 A ; conductor No. 6: 65 A * 0.8 = 52 A (el conductor es adecuado)
TUBO 2 : MOTORES 2 Y 6
3 conductores THWN No. 12 * 7.90 mm2 = 23.70 mm2
1 conductor THWN No. 10 * 12.30 mm2 = 12.30 mm2
3 conductores THWN No. 8 * 21.10 mm2 = 63.30 mm2
T O T A L: 99.30 mm2
________
At = 99.30 = 248.25 mm2 ; d = /4 * 248.25 = 17.78mm
0.4 √ 3.1416
Se usará tubería de 19mm de diámetro.
Ipc motor 2 = 15 A ; conductor No. 12: 20 * 0.8 = 16 A (el conductor es adecuado)
Ipc motor 6 = 40 A ; conductor No. 8: 50 * 0.8 = 40 A (el conductor es adecuado)
TUBO 3 : MOTORES 3, 4 Y 5
3 conductores THWN No. 14 * 5.80 mm2 = 17.40 mm2
4 conductores THWN No. 10 * 12.30 mm2 = 49.20 mm2
3 conductores THWN No. 8 * 21.10 mm2 = 63.30 mm2
T O T A L : 129.90 mm2
________
At = 129.90 = 324.75 mm2 ; d = /4 * 324.75 = 20.33mm
0.4 √ 3.1416
Se usará tubería de 25mm de diámetro
Ipc motor 3 = 27 A ; conductor No. 8: 50 * 0.7 = 35.0 A (el conductor es adecuado)
Ipc motor 4 = 9 A ; conductor No. 14: 15 * 0.7 = 10.5 A (el conductor es adecuado)
Ipc motor 5 = 22 A ; conductor No. 10: 30 * 0.7 = 21.0 A (el conductor no es adecuado)
En este caso, será necesario cambiar los tres conductores de fase del motor 5 por calibre
No. 8, pudiéndose seguir utilizando el mismo diámetro de tubería.
Un procedimiento similar deberá aplicarse para determinar las características de la
canalización de los tramos 2 y 3 en su recorrido principal.
Cabe aclarar que en la práctica no es conveniente, en ocasiones, cambiar varias veces el
diámetro de los diferentes tramos de la canalización porque pueden incrementarse en forma
excesiva los desperdicios del material. Deberá ponderarse esta situación para decidir en
última instancia los diámetros de la tubería en los diferentes tramos de la instalación.
DETERMINACIÓN DE LA CAÍDA DE VOLTAJE EN LOS CIRCUITOS DERIVADOS
Por ser una distribución trifásica en delta, la fórmula aplicable es:
edmundo gutiérrez vera d. r.
20. _________________________________Capítulo 9______________________________ 193
__
e% = 2 √ 3 * L * I
Ef * S
Se tendrá entonces:
CIRCUITO CALIBRE SECCIÓN LONGITUD (m) CAÍDA DE
DERIVADO CONDUCTOR (mm2) (+) TENSIÓN EN %
M1 12 3.31 35 + 5 2.85
M2 12 3.31 25 + 5 2.14
M3 8 8.37 15 + 5 1.01
M4 14 2.08 15 + 5 1.36
M5 8 8.37 25 + 5 1.24
M6 8 8.37 35 + 5 3.00
M7 6 13.30 35 + 5 2.46
NOTA: (+) Se aumentan 5 metros a la distancia en planta del tablero a cada motor,
suponiendo que el tablero está a 1.70 m del piso, los conductores suben 1.8 m hasta el techo
ya que la altura del local es de 3.5 m y bajan en cada motor 3.20m, suponiendo que se
pondrá una caja de salida a 0.30m del piso.
Aplicando la fórmula de caída de tensión por resistencia en cada uno de los casos se tendrá:
e%1 = 2 * 1.73 * 40 * 15 = 2.85% e%2 = 2 * 1.73 * 30 * 15 = 2.14%
220 * 3.31 220 * 3.31
e%3 = 2 * 1.73 * 20 * 27 = 1.01% e%4 = 2 * 1.73 * 20 * 9 = 1.36%
220 * 8.37 220 * 2.08
e%5 = 2 * 1.73 * 30 * 22 = 1.24% e%6 = 2 * 1.73 * 40 * 40 = 3.00%
220 * 8.37 220 * 8.37
e%7 = 2 * 1.73 * 40 * 52 = 2.46%
220 * 13.30
Como se observa, ninguna caída de tensión de los circuitos derivados es mayor del 3% y por
lo tanto se concluye que los conductores seleccionados son correctos.
CAÍDA DE TENSIÓN EN EL ALIMENTADOR
Por las altas corrientes que generalmente circulan en esta parte de la instalación, es
recomendable que la caída de tensión se determine en estos casos, tomando en cuenta la
resistencia y la reactancia de los conductores. Las fórmulas aplicables serán por lo tanto:
______________
e = √ (R * I)2 + (X * I)2 ; e% = e * 100
edmundo gutiérrez vera d. r.
21. _________________________________Capítulo 9______________________________ 194
En
De la tabla No. 11 y sabiendo que el alimentador está alojado en un tubo de acero
galvanizado, se tiene para conductores 3/0 AWG:
R = 0.073 Ohms/1000 pies
Rc = 0.073 * 40 * 3.28 * 1.04 = 0.00996 Ohms
1000
X = 0.031 Ohms/1000 pies
Xc = 0.031 * 40 * 3.28 * 1.25 = 0.00508 Ohms
1000
La corriente en el alimentador es la suma de las corrientes a plena carga de todos los
motores; o sea:
It = 15 + 15 + 27 + 9 + 22 + 40 + 52 = 180 amperes
La caída de tensión en volts y en por ciento será:
_____________________________
e = √ (0.00996 * 180)2 + (0.00508 * 180)2 = 2.013 V
e% = 2.013 * 100 = 1.59%
220/√3
Al tener el alimentador una caída de tensión inferior al 2%, se cumplen también las
especificaciones del problema.
9.5 DESCRIPCIÓN DE LOS DIFERENTES ELEMENTOS QUE PUEDEN ESTAR
CONECTADOS AL CIRCUITO DERIVADO DE UN MOTOR
Cada circuito de control para un motor o un grupo de ellos, está formado por un cierto
número de componentes básicos conectados entre sí, para cumplir con un comportamiento
determinado. Los componentes utilizados y su tamaño o capacidad dependerán del tamaño y
características del motor o grupo de motores que van a controlar. A continuación, se
describirán algunos de los principales elementos de un circuito de control para motores.
DESCONECTADORES
Constituyen uno de los medios de control de motores más elementales, ya que los conectan
y desconectan de la fuente de alimentación mediante un juego de navajas; dos para sistemas
monofásicos y tres para sistemas trifásicos. Las navajas abren o cierran simultáneamente
por medio de un mecanismo y, se encuentran alojadas en cajas metálicas. Deben ser
seleccionadas para conducir la corriente nominal por tiempo indefinido y la de cortocircuito
por un período breve de tiempo. Pueden contar o no con fusibles para cada línea. Las
normas técnicas establecen que las navajas del desconectador queden montadas en tal
forma que cuando abran, tiendan a seguir el sentido de la gravedad. Existen
desconectadoras de dos y tres polos llamadas de doble tiro, que pueden utilizarse para
edmundo gutiérrez vera d. r.
22. _________________________________Capítulo 9______________________________ 195
conectar el motor a una alimentación de emergencia o bien, para cambiar su sentido de giro
si el equipo es reversible.
Figura 9.5 Cuchillas desconectadoras de tiro sencillo y de doble tiro
DISPOSITIVOS DE PROTECCIÓN DEL CIRCUITO DERIVADO
El circuito derivado del motor puede protegerse contra cortocircuitos mediante fusibles que
pueden ser normales o de acción retardada o, con interruptores termomagnéticos que a su
vez pueden ser de tipo instantáneo o de tiempo inverso. En el capítulo 7 de este texto se
trataron con suficiente amplitud las características principales de estos dispositivos de
protección por lo cual, no se considera necesario ampliar la información sobre el particular.
DESCONECTADORES TIPO TAMBOR
Son los dispositivos más conocidos y usados para controlar manualmente los motores. Son
interruptores rotatorios formados por conjuntos de contactos operados por una palanca o por
una manija de disco. Girando la palanca o el disco es posible que un desconectador de
tambor encienda, pare, invierta y controle la velocidad de un motor. El desconectador de
tambor puede ser del tipo segmentado que tiene sus contactos controlados por tramos
conductores en la periferia de un tambor giratorio o, de tipo leva que tiene sus contactos
controlados por levas que actúan soportadas por el tambor giratorio. La secuencia de
interrupción es la acción de los conjuntos de contactos que se hacen funcionar en un orden
específico con respecto a otros conjuntos de contactos en el mismo interruptor. Como
ejemplo, en la gráfica 9.7 se muestra el croquis de un desconectador tipo tambor y, una
secuencia determinada de operaciones.
edmundo gutiérrez vera d. r.
23. _________________________________Capítulo 9______________________________ 196
Figura 9.7 Desconectador tipo tambor.
ESTACIÓN DE BOTONES
Es básicamente un interruptor que se actúa por la presión de los dedos, de manera que dos
o más contactos cierran o abren cuando se oprimen los botones correspondientes. Se usan
resortes en los botones para regresarlos a su posición original después de ser presionados.
Estas estaciones pueden venir en caja de uso general, para embutir o sobreponer, a prueba
de agua y polvo o a prueba de explosión. Las estaciones para servicio normal vienen con
uno, dos o tres botones los cuales son de plástico moldeado que pueden tener diferentes
colores. Generalmente los contactos son con acabado plateado y su apertura en dos puntos
asegura una operación confiable. Pueden tener luces indicadoras. Las estaciones de botones
se utilizan generalmente en combinación con contactores magnéticos para controlar motores
u otro equipo eléctrico desde estaciones remotas.
El botón de arranque tiene un juego de contactos normalmente abiertos y, el de paro, uno
normalmente cerrado. Al oprimir el botón de arranque se cierra el circuito eléctrico, quedando
energizada la bobina del contactor, la que a su vez opera los contactos auxiliares cerrándose
éstos. Al dejar de oprimir el botón de arranque, regresa a su posición original, abriéndose sus
contactos, pero el circuito sigue cerrado a través de los contactos auxiliares. Al oprimir el
edmundo gutiérrez vera d. r.
24. _________________________________Capítulo 9______________________________ 197
botón de paro se abren sus contactos, desaparece la diferencia de potencial aplicada a las
terminales de la bobina abriendo los contactos principales del contactor y también los
contactos auxiliares. Al dejar de oprimir el botón de paro se cierran nuevamente sus
contactos, pero el circuito permanece sin potencial al estar abiertos los contactos auxiliares y
los de arranque. Este principio de operación da al motor una protección contra bajo voltaje ya
que si éste no es el adecuado, la bobina no retiene los contactos auxiliares y al dejar de
oprimir el botón de arranque, el circuito queda abierto. En la figura 9.8 se muestra un
esquema de una estación de botones y de su circuito eléctrico.
Figura 9.8 Estación de botones.
RELEVADORES DE CONTROL
Son dispositivos diseñados para ser utilizados en circuitos piloto, en circuitos de control de
diferentes relevadores, contactores u otros elementos. Debido a sus requerimientos más
bajos de corriente y voltaje de conmutación, los contactos pueden ser mucho más pequeños
y tener menos separación. Pueden tener uno o más juegos de contactos que operan cuando
a su bobina se le aplica un potencial el que produce un campo magnético que atrae una
armadura móvil, accionando sus contactos. Algunas de sus utilizaciones son como
edmundo gutiérrez vera d. r.
25. _________________________________Capítulo 9______________________________ 198
arrancadores de motores pequeños, detectores de pérdida de campo, indicadores de
velocidad, etc.
RELEVADORES DE TIEMPO
Un relevador de tiempo o de retraso, es un dispositivo de control que suministra una función
de conmutación con el paso del tiempo. Hay varios tipos de relevadores de tiempo tales
como los operados con motor, hidráulico, de decaimiento de flujo magnético, de descarga de
capacitor, electrónicos, neumáticos, etc. Uno de los tipos más usuales es el de retraso
neumático que utiliza el escape de un fluido o aire a través de un orificio ajustable, para
regular la secuencia de sus operaciones. Estos relevadores constan de una bobina de
operación, una cabeza neumática y varios conjuntos de contactos. Al aplicar un potencial a la
bobina de operación, manda la señal de cierre o apertura de contactos con el retraso de
tiempo que se haya programado en su rueda de ajuste y los que varían generalmente de 0.2
a 60 segundos. Estos relevadores son muy utilizados para desarrollar los diferentes pasos en
los arrancadores a tensión reducida.
RELOJ SECUENCIAL
Es un dispositivo a base de levas de recirculación operadas por un motor. Este elemento se
utiliza cuando debe ocurrir un proceso definido de encendido o apagado o una secuencia de
operaciones dentro de un intervalo dado. Los relojes secuenciales abren y cierran
interruptores de acuerdo con un programa fijo.
RELEVADOR DE SOBRECARGA
Es un dispositivo del circuito de control para proteger a un motor contra sobrecargas. En
serie con los conductores de la línea del motor se conectan elementos térmicos o magnéticos
sensibles a la corriente. Cuando se alcanza un valor predeterminado de la corriente de
sobrecarga, el relevador se dispara y corta la energía a los controles del arranque, liberando
al motor de la sobrecarga. Cuenta con un botón de restablecimiento manual o automático
para restablecer el funcionamiento del circuito de control, arrancando nuevamente el motor.
Los elementos térmicos o magnéticos son de tiempo inverso para evitar la operación del
relevador durante el arranque del motor. El ajuste de disparo puede variarse fácilmente
cambiando los elementos térmicos que son muy accesibles. Se tiene además una perilla de
ajuste que permite que el punto de disparo pueda ser ajustado entre el 85 y el 115% del valor
nominal del elemento térmico o magnético.
FRENOS MAGNÉTICOS
Son dispositivos operados por un solenoide y que se utilizan donde se requiere frenado
automático o sostén de cargas, como en transportadores, elevadores, montacargas, etc.
Generalmente operan sobre la extensión de la flecha del motor, pero también pueden operar
sobre una flecha intermedia de la transmisión. El freno se suelta al ser operado
eléctricamente por medio del solenoide y, al cortar la corriente, unos resortes cierran las
balatas que oprimen un volante sobre la flecha del motor, produciéndose el efecto de
frenado.
LAMPARAS INDICADORAS
Son dispositivos piloto que sirven para mostrar una condición de funcionamiento específica
del motor como: parado, en funcionamiento hacia adelante, hacia atrás, etc. Estas lámparas
son generalmente incandescentes o de neón y cuentan con resistencias limitadoras de
edmundo gutiérrez vera d. r.
26. _________________________________Capítulo 9______________________________ 199
corriente. Se pueden obtener para voltajes nominales de 120, 220 y 440 V y, mediante el uso
de transformadores, pueden emplearse lámparas de 6, 12 y 24 V.
INTERRUPTORES DE LÍMITE
Son ideales para las funciones de las máquinas automáticas y para las aplicaciones de uso
general donde se requiere controlar el movimiento lineal o lateral. Tienen palancas de
diferentes tamaños y ajustes parra una amplia gama de operaciones. Sus contactos de
acción momentánea son convertibles para operar en sentido horario o a la inversa o bien, en
las dos direcciones.
INTERRUPTORES DE NIVEL
Es un interruptor en caja NEMA de usos generales que puede ser para uso interior o exterior,
de dos polos y cuyos contactos son operados por un soporte varilla al cual se le incorpora un
flotador. Al bajar el nivel del líquido baja el flotador provocando el cierre de los contactos lo
que permite aplicar un potencial al motor de una bomba, ya sea en forma directa o a través
de un contactor. Al inyectarse líquido al receptáculo controlado, provoca la elevación del
flotador el que, al llegar al nivel predeterminado, abre los contactos y desenergiza el motor de
la bomba. En la gráfica 9.9 se muestra el diagrama eléctrico de un interruptor de nivel.
Figura 9.9 Esquema de un interruptor de nivel.
INTERRUPTORES DE PRESIÓN
Son del tipo diafragma, de un polo, doble tiro, donde generalmente los contactos que
permiten arrancar el motor o un contactor, cierran cuando se presenta una baja presión y
abren con alta presión, aún cuando la operación puede ser a la inversa. Son utilizados en
bombas y compresoras para agua, aceite, aire y gases. Se emplean usualmente para
mantener una presión determinada en recipientes específicos como tanques de aire para
gasolineras.
INTERRUPTORES DE TEMPERATURA
Con un principio similar al anterior, existen interruptores que operan por temperatura y que
son muy usuales en refrigeradores, equipos de aire acondicionado, equipos de ventilación
forzada en transformadores de potencia, etc.
ARRANCADORES MANUALES PARA MOTORES DE BAJA CAPACIDAD
Son dispositivos para el arranque directo de motores monofásicos y trifásicos, pudiéndose
obtener hasta para potencias de 15 HP. Se encuentran en voltajes de 127 y 220 V para
edmundo gutiérrez vera d. r.
27. _________________________________Capítulo 9______________________________ 200
motores monofásicos y 127, 208/220 y 440/600 V para trifásicos. Consisten
fundamentalmente de un interruptor manual de corte rápido y elementos térmicos para
proteger el motor contra sobrecargas. Es decir, este dispositivo no cuenta con protección
contra cortocircuito, la cual debe instalarse aparte. Sus contactos están separados por
barreras y todos sus componentes se colocan generalmente en cajas NEMA 1 las cuales
tienen troqueles que permiten la instalación de luces piloto. Existen arrancadores de este tipo
con dos juegos de contactos para operar motores reversibles. En la parte frontal de dichos
arrancadores se cuenta con un seguro mecánico para evitar que los dos juegos de contactos
puedan cerrarse al mismo tiempo. Los arrancadores monofásicos tienen un sólo elemento
térmico y los trifásicos pueden tener dos o tres elementos. Hay elementos térmicos de una
gran variedad de capacidades lo que permite seleccionar fácilmente los más adecuados para
proteger los motores contra sobrecargas. En la figura 9.10 se muestra el esquema de un
arrancador manual y sus diferentes diagramas eléctricos.
Figura 9.10 Arrancador manual para motores monofásicos y trifásicos de baja
capacidad.
edmundo gutiérrez vera d. r.
28. _________________________________Capítulo 9______________________________ 201
CONTACTORES Y ARRANCADORES MAGNÉTICOS A TENSIÓN PLENA
Son dispositivos que permiten abrir o cerrar el circuito que alimenta un motor mediante una
señal eléctrica que alimenta una bobina y la que, por sus efectos de electroimán atrae un
juego de contactos móviles que al hacer contacto con los fijos cierra el circuito eléctrico que
permite aplicar un voltaje pleno a las terminales del motor. Al abrir el circuito y cesar el
campo magnético generado en la bobina, resortes que existen en este dispositivo regresan
los contactos móviles a su posición de normalmente abiertos, suspendiéndose la operación
del motor. Los componentes principales de un arrancador magnético son: base soporte,
terminales de presión para línea y para carga, un juego de contactos fijos principales, un
juego de contactos móviles principales de cara plana, montados sobre una armadura móvil,
sistema de extinción del arco eléctrico, núcleo magnético con polo sombreado para permitir
una operación silenciosa, resorte de retorno de acero inoxidable, bobina de construcción
sellada, contactos auxiliares y relevador de sobrecarga. Los contactores no cuentan con
relevadores de sobrecarga.
Los dispositivos objeto de análisis en este párrafo, se obtienen normalmente en tamaños
NEMA del 0 al 5 y en dos o tres polos. Permiten el control del equipo eléctrico desde
estaciones remotas o bien, pueden ser operados por dispositivos que captan situaciones
predeterminadas como interruptores de nivel, de presión o de otro tipo.
CONTACTORES DE ALUMBRADO
Están diseñados especialmente para sistemas de alumbrado público y para instalarse a la
intemperie, por lo cual, sus componentes, se montan en cajas NEMA No. 11. Cuentan con un
interruptor termo magnético y con un contactor cuya bobina puede ser alimentada mediante
la operación de una foto celda o de un interruptor. Estos contactores pueden ser utilizados en
sistemas eléctricos de 127 y de 220 volts. Se obtienen generalmente con termomagnéticos
de 50 amperes y las dimensiones aproximadas de las cajas que los contienen son de 36cm
de alto, 23cm de ancho y 13cm de fondo. En la figura 9.11 se muestra el esquema eléctrico
simplificado de un contactor para alumbrado público.
Figura 9.11 Contactor para luminarias de alumbrado público.
edmundo gutiérrez vera d. r.
29. _________________________________Capítulo 9______________________________ 202
ARRANCADORES MAGNÉTICOS COMBINADOS, NO REVERSIBLES
En un sólo gabinete que generalmente puede ser NEMA 1, 4 ó 12, se incluye un interruptor
con fusibles o uno termo magnético y un arrancador magnético a tensión plena, el cual como
antes se señaló, cuenta en forma integrada con relevadores de sobrecarga. Se obtienen en
tamaños NEMA del 0 al 5. En la figura 9.12 se muestra el diagrama de control de un
arrancador de este tipo.
Figura 9.12 Arrancador magnético no reversible.
ARRANCADORES MAGNÉTICOS REVERSIBLES
En algunas aplicaciones industriales es necesario que se disponga de la posibilidad de
invertir el sentido de rotación de un motor. Se sabe que para lograr esto en un motor trifásico,
basta con intercambiar dos conductores de fase lo cual se puede lograr con dos contactores
magnéticos y un interruptor manual de tres posiciones. Puede utilizarse en sustitución del
interruptor antes mencionado, una estación de botones con lo que se obtiene protección
contra baja tensión. Deben existir bloqueos mecánicos y/o eléctricos para proteger al circuito
contra cortos, evitando que un arrancador cierre hasta que el otro haya abierto totalmente.
En la figura 9.13 se muestra el diagrama de control de un arrancador reversible a tensión
plena.
edmundo gutiérrez vera d. r.
30. _________________________________Capítulo 9______________________________ 203
Figura 9.13 Arrancador magnético reversible.
ARRANCADORES A TENSIÓN REDUCIDA
Los arrancadores a tensión reducida son usados cuando disposiciones de los reglamentos
eléctricos respectivos y/o de las empresas suministradores de energía eléctrica obligan a
limitar las corrientes de arranque para evitar perjuicios a otros usuarios del sistema o, donde
existen restricciones mecánicas a un arranque rápido. Cuando un motor de inducción se
arranca directamente a tensión plena, la corriente de arranque es del orden de 6 a 8 veces la
corriente nominal con un par de arranque que es aproximadamente 140% del par de
régimen. Los arrancadores a tensión reducida se usan para evitar las fluctuaciones de
tensión en las líneas de las empresas eléctricas, causadas por las altas corrientes de
arranque y, también, en los casos donde un arranque muy rápido puede producir daño
mecánico al equipo o bien, donde el tipo de proceso requiere de un arranque muy suave. En
el arranque a tensión reducida se debe tener en cuenta que la corriente de arranque será
proporcional al voltaje de arranque y, el par de arranque será proporcional al cuadrado del
voltaje de arranque.
A continuación, se dará una breve descripción de los diferentes tipos de arrancadores a
tensión reducida que existen actualmente en el mercado.
ARRANCADOR POR AUTOTRANSFORMADOR
Estos arrancadores son de los más recomendables para usarse cuando las limitaciones de la
corriente de arranque son particularmente rigurosas, pues proporcionan el mismo par de
arranque con menor corriente inicial. Pueden tener tres devanados, uno para cada fase o
bien, dos devanados conectados en delta abierta. Estos devanados tienen generalmente tres
derivaciones para dar el 50, el 65 y el 80% del voltaje nominal durante el arranque. Pueden
ser manuales o automáticos y su tiempo de transferencia es del orden de 15 segundos como
máximo. El par de arranque será del 64% del par obtenido a tensión plena si se usa la
derivación del 80%; del 42% si se usa la de 65% y, del 25% si se usa la de 50%.
edmundo gutiérrez vera d. r.
31. _________________________________Capítulo 9______________________________ 204
Un arrancador combinado de este tipo, cuenta con la protección contra cortocircuitos del
motor, con un arrancador a base de auto transformador que puede ser de dos o tres
devanados, con relevadores de protección contra sobrecarga, contactores y un relevador de
retraso de tiempo que generalmente es del tipo neumático y que dará la secuencia de
operación. En arrancadores tamaño NEMA 5 y mayores, se cuenta además con
transformadores de corriente para la operación de los relevadores de sobrecarga. Al
oprimirse el botón de arranque en el circuito de control de este tipo de arrancadores, (ver
figura 9.14) la bobina del relevador de tiempo se energiza y se cierran inmediatamente los
contactos auxiliares "TR". Mediante su secuencia de operación, el relevador de tiempo cierra
los contactos que alimentan las bobinas de los contactores "A y S", cerrándose los contactos
principales y la delta del auto transformador.
Figura 9.14 Arrancador por auto transformador.
En estas condiciones, aparece un voltaje reducido en las terminales del motor, dependiendo
de la derivación del auto transformador que se haya utilizado. Algunos segundos después se
provoca la apertura de los contactos "S" y el cierre de los "B" con lo cual el motor queda
operando a su voltaje nominal. Existen bloqueos mecánicos para evitar que los contactos "A
y B" puedan cerrar simultáneamente.
ARRANCADOR CON RESISTENCIAS PRIMARIAS
Los arrancadores con resistencias primarias ofrecen una aceleración más suave que
cualquier otro arrancador para motores jaula de ardilla, exceptuando los nuevos
arrancadores de estado sólido. Se recomienda este tipo de arrancador donde existe peligro
de daño mecánico causado por arranques rápidos. La limitación de corriente es
aproximadamente igual que la producida por los arrancadores de devanado bipartido, pero
los de resistencia primaria por tener mejores características de aceleración proveen
corrientes de transferencia más bajas. Normalmente se suministran con resistencias que
edmundo gutiérrez vera d. r.
32. _________________________________Capítulo 9______________________________ 205
limitan la corriente inicial a un 65% de la corriente de arranque con lo cual su par inicial será
del 42% del par de arranque. Su tiempo de transferencia es de 5 segundos como máximo.
Como se observa en el diagrama de la figura 9.15, al oprimirse el botón de arranque se
aplica potencial a la bobina del relevador de retraso de tiempo y a la bobina A del arrancador,
cerrando de inmediato los contactos auxiliares "TR" y los contactos "A" del circuito. En este
momento y dado que los contactos "B" están abiertos la corriente pasa a través de las
resistencias lo que produce una caída de voltaje reduciéndose de esta manera el voltaje
aplicado al motor. Después de un tiempo predeterminado se cierran los contactos "B"
cortocircuitando las resistencias y aplicándose así el voltaje pleno a las terminales del motor.
Figura 9.15 Arrancador con resistencias primarias.
ARRANCADOR ESTRELLA - DELTA
Es un medio muy económico para obtener una corriente inicial de arranque muy baja, pero el
par de arranque es también bajo. Estos arrancadores se usan frecuentemente en
compresores de refrigeración que se arrancan sin carga y, son eficaces para cargas que
requieren menos del 33% del par normal de arranque. La corriente de arranque con estos
dispositivos es del orden del 33% de la corriente que tomaría en el arranque a tensión plena.
En este arrancador, al iniciarse el proceso de arranque, el devanado del motor está
conectado en estrella y después de un tiempo que varía entre 5 y 10 segundos, se hace la
transferencia quedando el motor conectado en delta, con lo cual recibe su voltaje nominal.
Como se observa en el diagrama de la figura 9.16, al oprimir el botón de arranque se aplica
potencial a la bobina del relevador de tiempo, a la que opera los contactos “A” y a la que
controla los contactos "S" que permiten formar la estrella. Después de un intervalo de tiempo
predeterminado, el relevador de tiempo manda señal para que abran los contactos "S" y para
que cierren los “B”, con lo cual se cierra también la conexión delta.
edmundo gutiérrez vera d. r.
33. _________________________________Capítulo 9______________________________ 206
Figura 9.16 Arrancador estrella delta.
ARRANCADOR PARA MOTORES CON DEVANADO BIPARTIDO
Estos arrancadores son particularmente indicados para los casos donde las empresas
suministradoras restringen la corriente inicial para cada etapa de aceleración más bien que
para el arranque completo. Este arrancador ofrece una solución económica a los problemas
de arranque a pesar de que requiere un motor especial. Toma aproximadamente un 60% de
su corriente inicial de arranque y, en ese momento, su par es del 48% del par normal. Su
tiempo de transferencia es de 5 segundos.
Al oprimirse el botón de arranque se cierran los contactos "A" lo que permite aplicar potencial
a la mitad del devanado bipartido del motor. Un tiempo después y debido a la señal que
manda el relevador de tiempo, se cierran los contactos "B", aplicándose en este momento el
potencial al devanado completo del motor, registrándose por lo tanto el voltaje nominal en
sus terminales. En la figura 9.17 se muestra el diagrama de control de este tipo de
arrancadores.
edmundo gutiérrez vera d. r.
34. _________________________________Capítulo 9______________________________ 207
Figura 9.17 Arrancador para motor de devanado bipartido.
ARRANCADORES DE ESTADO SÓLIDO
Están diseñados para usarse en motores trifásicos de inducción desde uno hasta 600 HP en
440 V y hasta 800 HP en 575 V de corriente alterna. Las partes fundamentales de este
arrancador son un microprocesador lógico de control y seis potenciómetros ajustables que
permiten su aplicación en la amplia gama de capacidades que antes se mencionan. Este tipo
de arrancador permite confeccionar las características de arranque del motor dependiendo
del tipo de carga. Cuenta con una rampa de encendido la que permite una aceleración suave
evitando las sacudidas del sistema mecánico. Su corriente de arranque es ajustable de 1 a 4
veces la corriente a plena carga del motor, permitiendo manejar el par inicial aplicado a la
carga, manteniendo al mínimo los choques mecánicos. El ajuste de la corriente proporciona
una aceleración suave a corriente y par reducido lo cual disminuye el desgaste mecánico y
se cumplen con todas las disposiciones de los reglamentos eléctricos y las normas de las
empresas suministradoras.
Su rampa de corriente es ajustable de 2 a 30 segundos lo cual es ideal cuando se requiere
una aceleración muy suave. Tiene un pulso de arranque ajustable de 0 a 2 segundos que
proporciona un pulso de 4 veces la corriente a plena carga del motor con su consiguiente par
elevado que permite romper pérdidas de alta fricción o cargas de alta inercia sin peligro de
acelerar la carga rápidamente.
Su protección contra sobre corriente es ajustable desde el 50 hasta el 400% de la corriente a
plena carga del motor, contando con un juego de contactos que cierran y operan alarmas
visuales o audibles cuando la corriente está por alcanzar el valor de disparo. Esto permite
que el operador pueda bajar carga al motor y evitar que se dispare impidiendo pérdidas y
demoras en los procesos. Reduce el voltaje en las terminales del motor cuando éste trabaja
sin carga o ligeramente cargado, lo cual ahorra energía y reduce la temperatura del motor.
Algunos tipos de estos arrancadores cuentan con dispositivos para establecer una rampa de
desaceleración y frenar el motor que sale de servicio, en un tiempo predeterminado,
pudiendo provocar el frenado brusco del motor o permitir que éste se desacelere libremente.
edmundo gutiérrez vera d. r.
35. _________________________________Capítulo 9______________________________ 208
Es importante mencionar que para dar mantenimiento al motor deberá desconectarse el
circuito ya que aún con el arrancador abierto existirá un voltaje en las terminales del motor y
el que, pasa por los potenciómetros.
A continuación, se proporciona una tabla se selección de arrancadores a tensión reducida,
de acuerdo con la característica predominante que se desea obtener.
TABLA PARA LA SELECCIÓN DE ARRANCADORES A TENSIÓN REDUCIDA
CARACTERÍSTICA TIPO DE ARRANCADOR OBSERVACIONES
PREDOMINANTE
1. Estado sólido
2.- Resistencia primaria
ACELERACIÓN SUAVE 3.- Estrella - Delta
4.- Auto transformador
5.- Devanado bipartido
1.- Estado sólido El motor de devanado
ALTO PAR DE ARRANQUE 2.- Auto transformador bipartido no puede acelerar al
3.- Resistencia primaria 100% de la carga hasta que
4.- Devanado bipartido es conectado el 2o. Devanado
1.- Devanado bipartido
2.- Estrella - Delta
BAJO COSTO 3.- Auto transformador
4.- Resistencia primaria
5.- Estado sólido
CARACTERÍSTICA TIPO DE ARRANCADOR OBSERVACIONES
PREDOMINANTE
1.- Estado sólido
LARGA ACELERACIÓN 2.- Auto transformador
3.- Estrella - Delta
4.- Resistencia primaria
1.- Devanado bipartido
CARGAS LIVIANAS EN EL 2.- Estrella - Delta
ARRANQUE 3.- Resistencia primaria
4.- Auto transformador
5.- Estado sólido
1.- Estado sólido
MÍNIMA CORRIENTE DE 2.- Auto transformador
LÍNEA AL ARRANQUE 3.- Estrella - Delta
4.- Devanado bipartido
5.- Resistencia primaria
TRANSFORMADORES DE CONTROL
edmundo gutiérrez vera d. r.
36. _________________________________Capítulo 9______________________________ 209
Con el fin de reducir riesgos al personal o cuando se desea reducir costos y tamaños de los
dispositivos de control, sobre todo cuando el voltaje de línea de los motores es de 440 V,
pueden conectarse todos los dispositivos de control a través de un transformador cuyo
voltaje secundario es generalmente de 127 V y no conectarse a la línea de alimentación del
motor. Como el transformador sólo alimenta los dispositivos de control y no la línea principal
del motor, es de muy baja capacidad, tamaño pequeño y bajo costo. En la figura 9.18 se
muestra un diagrama de control que utiliza un transformador como el que antes se señala.
Figura 9.18 Arrancador con control separado.
9.6 CENTROS DE CONTROL DE MOTORES
Un centro de control de motores es esencialmente un tablero de piso, auto soportado; es
decir, está diseñado para instalarse retirado de las paredes de manera tal que son accesibles
por el frente y por la parte trasera. Requieren entonces de espacio libre para la circulación de
operadores y para las labores de conservación y mantenimiento. En estos centros se pueden
montar los componentes del alimentador y de los circuitos derivados de los motores. Desde
luego, no es indispensable que todos los componentes se incluyan en el centro de control de
motores ya que puede ser conveniente que algunos de ellos se localicen en otro lugar.
Los centros de control de motores se integran por una o varias secciones modulares,
consistiendo cada sección de cubiertas laterales de lámina generalmente calibre No. 14 con
dobleces que proporcionan una gran rigidez, fijándose las secciones sobre un canal de
anclaje de 4 pulgadas. Cuenta además con estructura de soporte y puertas. Las secciones
pueden ser de un sólo frente o con doble frente (back to back). En cada sección se cuenta
con tres barras conductoras colocadas en forma vertical, generalmente de 450 amperes de
capacidad y 25 KA de capacidad de cortocircuito, donde se enchufan las unidades de control.
A su vez, las barras verticales están conectadas por la parte superior a un juego de barras
horizontales alimentadoras de todas las secciones. Estas barras normalmente tienen una
ampacidad de 600 amperes y 25 KA de capacidad de cortocircuito, existiendo la opción de
barras con ampacidad hasta de 3000 amperes y 42, 65 ó 100 KA de capacidad de
cortocircuito. En la parte inferior, las secciones cuentan con una barra horizontal de tierra.
Las secciones pueden acoplarse mecánica y eléctricamente entre si. Las dimensiones varían
de acuerdo con los fabricantes, pudiendo señalarse sin embargo que las dimensiones
aproximadas de cada sección son 2.30 m de alto; 0.60 de ancho y 0.50 de fondo. Los
edmundo gutiérrez vera d. r.
37. _________________________________Capítulo 9______________________________ 210
gabinetes de las secciones se obtienen en NEMA 1 para servicio interior y, opcionalmente,
pueden fabricarse en NEMA 3R para servicio exterior a prueba de lluvia, NEMA 5 para
servicio interior a prueba de polvo y, NEMA 12 para servicio interior a prueba de polvo y de
goteo.
Cada sección constará de un número determinado de unidades de control, cada una de las
cuales contendrá los elementos necesarios para proteger y controlar el circuito derivado de
un motor como: interruptor termo magnético, arrancador, relevador de sobrecarga,
relevadores de control, contactores requeridos, estaciones de botones lámparas indicadoras
e inclusive, aparatos de medición.
Los centros de control de motores permiten que todos los elementos de control se alejen de
lugares peligrosos, permiten centralizar el equipo en el lugar más apropiado logrando que un
sólo operador controle y observe las operaciones industriales y proporcionan además,
mayores facilidades a las labores de conservación y mantenimiento.
Generalmente cada módulo o unidad de control tendrá todos los dispositivos para la
protección y control de un motor y que básicamente son:
a) INTERRUPTOR TERMOMAGNETICO NORMAL O ELECTRÓNICO. Podrá ser de
operación manual o eléctrica y disparo automático. Cuando es de operación manual en la
puerta del gabinete se instala un dispositivo de palanca para operar el termo magnético sin
necesidad de abrir la puerta.
b) ARRANCADORES. Usualmente son del tipo magnético y serán a tensión plena o tensión
reducida de acuerdo con las características del motor. Su operación podrá ser por medio
de una estación de botones colocada en la misma unidad o desde una estación remota.
c) RELEVADORES DE SOBRECARGA. Como ya se mencionó, estos dispositivos son
indispensables para proteger al motor contra sobrecargas. Generalmente forman parte del
arrancador y, en tamaños NEMA 5 o mayores, ser requerirán transformadores de corriente
para su operación.
d) RELEVADORES DE CONTROL Y CONTACTORES. Se deberá instalar el número
necesario de estos elementos para el desarrollo de todas las operaciones que estén
contempladas.
e) LAMPARAS PILOTO Y EQUIPOS DE MEDICION. Se instalarán estos dispositivos si así
se ha considerado conveniente.
En la figura 9.18’ se muestra un esquema de una sección modular de un centro de control de
motores.
De acuerdo con la NEMA existe la siguiente clasificación de arrancadores:
edmundo gutiérrez vera d. r.
38. _________________________________Capítulo 9______________________________ 211
CLASIFICACIÓN DE ARRANCADORES SEGÚN NEMA
TAMAÑO HP MÁXIMOS PARA MOTORES TRIFÁSICOS
NEMA 220 VOLTS 440 VOLTS
00 1.5 2.0
0 3.0 5.0
1 7.5 10.0
2 15.0 25.0
3 30.0 50.0
4 50.0 100.0
5 100.0 200.0
6 200.0 400.0
A continuación se darán algunas tablas que muestran las dimensiones aproximadas de la
combinación de diferentes dispositivos para la protección y control de motores, con el fin de
que se tenga una idea de las dimensiones que aproximadamente tendría un centro de control
de motores y poder prever el espacio necesario para colocarlo.
INTERRUPTOR TERMOMAGNETICO TRES POLOS
AMPERES MARCO CAPACIDAD INTERRUPTIVA DIMENSIONES cm.
CONTINUOS 240 VOLTS 480 VOLTS ALTO ANCHO
15 a 100 FA 10 000 --- 20 60
15 a 150 FB 18 000 14 000 20 60
15 a 150 HFB 65 000 25 000 20 60
125 a 400 LB 42 000 30 000 30 60
125 a 400 HLB 65 000 35 000 30 60
500 a 600 LA 42 000 30 000 50 60
700 a 1 200 NB 42 000 30 000 60 60
1 400 a 3 000 PB 125 000 100 000 80 60
NOTA: Las dimensiones que se señalan son las del módulo que contiene al interruptor termo
magnético y no las dimensiones del propio interruptor, mismas que pueden observarse en la
tabla No. 9 de esta obra.
COMBINACIÓN INTERRUPTOR TERMOMAGNETICO, ARRANCADOR A TENSIÓN
PLENA, PROTECCIÓN CONTRA SOBRECARGA Y DISPOSITIVOS AUXILIARES.
edmundo gutiérrez vera d. r.
39. _________________________________Capítulo 9______________________________ 212
TAMAÑO POTENCIA MÁXIMA EN HP DIMENSIONES EN CENTÍMETROS
ARRANCADOR 220 VOLTS 440 VOLTS ALTO ANCHO
0 3.0 5.0 30 60
1 7.5 10.0 30 60
2 15.0 25.0 30 60
3 30.0 50.0 30 60
4 50.0 100.0 40 60
COMBINACIÓN INTERRUPTOR TERMOMAGNETICO, ARRANCADOR ESTRELLA
DELTA, PROTECCIÓN CONTRA SOBRECARGA Y DISPOSITIVOS AUXILIARES.
TAMAÑO POTENCIA MÁXIMA EN HP DIMENSIONES EN CENTÍMETROS
ARRANCADOR 220 VOLTS 440 VOLTS ALTO ANCHO
1 7.5 10.0 30 60
2 15.0 25.0 30 60
3 30.0 50.0 30 60
4 50.0 100.0 40 60
COMBINACIÓN INTERRUPTOR TERMOMAGNETICO, ARRANCADOR CON
AUTOTRANSFORMADOR, PROTECCIÓN CONTRA SOBRECARGA Y DISPOSITIVOS
AUXILIARES.
TAMAÑO POTENCIA MÁXIMA EN HP DIMENSIONES EN CENTÍMETROS
ARRANCADOR 220 VOLTS 440 VOLTS ALTO ANCHO
2 15.0 25.0 90 60
3 30.0 50.0 90 60
4 50.0 100.0 90 60
5 100.0 200.0 110 60
6 200.0 400.0 110 60
edmundo gutiérrez vera d. r.
40. _________________________________Capítulo 9______________________________ 213
1.- Estructura soporte, de lámina 11.- Arrancador y rel. de sobrecarga
2.- Ventana de inspección 12.- Tablilla de conexiones
3.- Techo de lámina 13.- Barra de tierra
4.- Puerta del frente 14.- Base de anclaje
5.- Diafragma de separación 15.- Lámina del fondo
6.- Lámina lateral separadora 16.- Estación de botones
7.- Barras principales horizontales 17.- Lámparas piloto
8.- Barras verticales 18.- Alambrado
9.- Instrumentos de medición 19.- Contactor
10.- Interruptor termo magnético 20.- Relevador de control
Figura 9.18’ Centro de control de motores
EJEMPLO.- En un local industrial donde existe contaminación por productos químicos y
humedad, se encuentran instalados los motores cuya ubicación y características se señalan
a continuación. Localizar el lugar ideal del centro de control de motores, elaborar el
anteproyecto de éste y diseñar la instalación de fuerza. La caída de tensión máxima
permisible en los circuitos derivados es del 3% y del 2% en el alimentador. Este último está
alojado en tubería de PVC. La protección de los circuitos derivados y del alimentador debe
ser con interruptores termomagnéticos de tiempo inverso. La altura del local es de 4.0
metros.
edmundo gutiérrez vera d. r.
41. _________________________________Capítulo 9______________________________ 214
Fig. 9.19 Croquis que muestra la colocación de motores y subestación
C O N C E P T O M1 M2 M3 M4 M5 M6 M7
Potencia en HP 2 2 10 7.5 5 15 20
Tipo de rotor JA JA JA JA JA JA JA
Tipo de arranque TP TP TP TP TP AT AT
Letra clave A A C C C H H
Voltaje 220 220 220 220 220 220 220
Número de fases 3 3 3 3 3 3 3
Corriente plena carga (tabla 16) 6.5 6.5 27 22 15 40 52
1.25 * Ipc 8.1 8.1 33.8 27.5 18.8 50 65
Factor en por ciento (tabla 17) 150 150 200 200 200 200 200
Factor * Ipc 9.8 9.8 54 44 30 80 104
Capacidad I.T.M. (tabla 13) 15 15 70 50 30 100 125
3 conductores de fase THWN 14 14 8 10 12 8 6
1 conductor de tierra THWN 14 14 10 10 12 10 8
Protección S.C. motor 8.1 8.1 33.8 27.5 18.8 50 65
Cap. Elemento térmico (tabla 18) 8.63 8.63 36.6 27.9 19.0 55.1 69.5
CORRIENTE DEL ALIMENTADOR:
Ialim = 1.25 * 52 + 6.5 + 6.5 + 27 + 22 + 15 + 40 = 182 amperes
De acuerdo con la tabla No. 6, se usarán tres conductores THWN para las fases, calibre 3/0
AWG. Para el neutro se utilizará un conductor similar, es decir, también THWN 3/0 AWG.
PROTECCIÓN DEL ALIMENTADOR:
Iprot = 125 + 6.5 + 6.5 + 27 + 22 + 15 + 40 = 242 amperes
Se usará un interruptor termo magnético, tres polos, de 225 amperes.
edmundo gutiérrez vera d. r.