1. Fundamentos del lenguaje ensamblador
235
Fundamentos del
lenguaje ensamblador
4.1.-El lenguaje ensamblador y el lenguaje de máquina.
Al dar una definición, en pocas palabras, de una computadora, se puede decir que se trata de un equipo
para interpretar y ejecutar una secuencia de elementos de información almacenados en la memoria y
realizar una serie de operaciones que estarán determinadas por la secuencia de pasos ejecutados. Las
operaciones efectuadas incluyen la transformación de datos por la unidad aritmética a partir de códigos en
memoria, así como la especificación de la dirección de la siguiente instrucción a ser ejecutada.
La interpretación de las sucesivas instrucciones en una secuencia y su realización, constituye lo que se
llama ejecución de un programa. Aquellos programas que pueden ejecutarse directamente por el
microprocesador, se dice que están en lenguaje de máquina.
Los programas escritos en lenguaje de máquina son muy difíciles de implementar, ello se debe a que el
usuario tiene que convertir el nemotécnico que representa a la instrucción en código binario, especificar la
dirección de memoria donde se encuentre la instrucción y trabajar con las variables asociadas a una o
varias direcciones de memoria.
4.2.-La puesta a punto de programas en ensamblador.
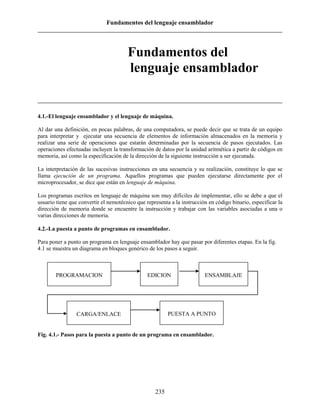
Para poner a punto un programa en lenguaje ensamblador hay que pasar por diferentes etapas. En la fig.
4.1 se muestra un diagrama en bloques genérico de los pasos a seguir.
Fig. 4.1.- Pasos para la puesta a punto de un programa en ensamblador.
PROGRAMACION EDICION ENSAMBLAJE
CARGA/ENLACE PUESTA A PUNTO
2. Fundamentos del lenguaje ensamblador
236
4.2.1.-La Programación.
La programación requiere de ejercitación, experimentación y de concentración. Generalmente el costo
para el desarrollo del software en un sistema basado en microprocesador es mucho mayor que el costo
para el desarrollo del hardware.
Para el programador de microprocesadores es importante conocer, además del repertorio de instrucciones,
la arquitectura interna del procesador.
Los pasos a seguir en la programación son:
a.-)Análisis del problema: En este primer paso el programador debe cerciorarse de la información de
entrada y el resultado que se quiere producir, se establece además una relación con el hardware basada en
la capacidad de RAM y ROM demandada, el procedimiento de entrada/salida, la capacidad de la pila
(stack), las condiciones de tiempo, etc.
b.-)Diseño: Se deben desarrollar varios objetos de datos (elementos), para cada objeto habrá un conjunto
de operaciones básicas a realizar. Considere que estas operaciones existen en forma de subrutinas y
escriba un algoritmo que resuelva el problema de acuerdo a los requerimientos.
Definición de algoritmo: Es un conjunto de instrucciones que llevan a cabo una tarea en particular y debe
satisfacer los criterios de: entrada, precisión, limitación y eficacia.
Los diagramas de flujo( equivalentes al algoritmo) pueden dividirse en tres niveles:
(1).-Conceptual: Se hace una descripción general del problema, independientemente del tipo de
microprocesador (grandes bloques).
(2).-Diagramas de flujo con los algoritmos para cada una de las operaciones básicas: También
independiente del microprocesador, cada bloque del diagrama conceptual es subdividido de acuerdo al
algoritmo necesario para desarrollarlo, pensando en las operaciones que tienen que ser desarrolladas en el
bloque, fijando las acciones y la secuencia en que se van a ejecutar.
(3).- Diagrama de flujo con las instrucciones: Dependiente del microprocesador, cada símbolo en este
diagrama debe representar de una a tres instrucciones. A partir de este diagrama el programa puede ser
escrito directamente.
c.-)Análisis: Se puede elaborar un algoritmo alternativo y compararlo con el anterior.
d.-)Escribir el programa fuente: Se escribe el programa fuente.
Los elementos que identifican las partes constituyentes de una línea en ensamblador son:
DIRECCIÓN CODIGOHEX ETIQUETAS OPERADOR OPERANDOS COMENTARIOS
4.2.2.-La Edición.
El programa elaborado se edita en cualquier editor de textos que exporte en formato ASCII, obteniéndose
el archivo fuente correspondiente (típicamente con extensión .ASM ó .SCR).
3. Fundamentos del lenguaje ensamblador
237
4.2.3.-El Ensamblaje.
A través del mismo se depuran los errores de sintaxis, el ensamblaje se realiza sobre el lenguaje fuente
previamente elaborado. Ante la presencia de errores se debe proceder a la corrección de los mismos a
través del proceso de edición.
4.2.4.-La carga-enlace.
Ejecutada a través del enlazador, permite al usuario escribir programas en ensamblador que estén
constituidos por varios módulos. El Enlazador resuelve referencias externas y realiza reubicaciones de
direcciones, además de generar diferentes formatos de archivos. Cuando se generen errores en la
carga/enlace, deben depurarse los mismos en el editor. Debe tenerse especial cuidado en que después de
corregirse los errores, el archivo fuente debe ser nuevamente ensamblado para que el enlazador ejecute su
acción sobre el archivo objeto corregido.
Como ejemplo, veamos los pasos a seguir en la sección de programa expuesto en algoritmo 4.1,
elaborado para un microcontrolador perteneciente a la serie MCS‟51.
INICIO: MOV DPTR,#3000H ; Se define un puntero
XRL A,A ; Coloca al acumulador en cero
MOV R1,10H ; Se define un contador
LAZO: MOVX @DPTR,A ; Se llena una zona de RAM
INC DPTR ; con ceros
DJNZ R1,LAZO
CONTINUA:
Algoritmo 4.1.- Ejemplo de un programa en ensamblador para la serie MCS’51.
Una vez escrito el programa, puede ensamblarse a mano, para ello debe establecerse una dirección de
memoria de partida; utilizada como referencia para ubicar las restantes instrucciones. Si la primera
instrucción se ubica en la dirección 0000H, la segunda (XRL A,A) será ubicada en la dirección 03h
puesto que la primera instrucción ocupa 3 bytes, así se le asigna a cada instrucción una posición, tal y
como se muestra en algoritmo 4.2.
Dirección PROGRAMA
0000 INICIO: MOV DPTR,#3000H
0003 XRL A,A
0005 MOV R1,10H
0007 LAZO: MOVX @DPTR,A
0008 INC DPTR
0009 DJNZ R1,LAZO
000B CONTINUA:
Algoritmo 4.2.- Ubicación de cada código en ensamblador en memoria.
Posteriormente se verifican las longitudes de las instrucciones y las direcciones asignadas, y se está en
condiciones de construir una tabla de nombres simbólicos. La tabla de nombres o tabla de símbolos tiene
tres entradas (INICIO, LAZO y CONTINUA). Por conveniencia, se colocan en orden alfabético:
Nombre Posición
CONTINUA 000B
4. Fundamentos del lenguaje ensamblador
238
INICIO 0000
LAZO 0007
El paso que sigue es la sustitución del nemotécnico de la instrucción por el código binario que la
representa y posteriormente se introduce el valor de los operandos, que serán valores inmediatos,
números de registro o elementos de memoria. Cuando se haga una referencia simbólica se consulta la
tabla de nombres y el valor correspondiente al símbolo en cuestión se adosa a la instrucción. El resultado
se muestra en algoritmo 4.3.
Dirección Código Programa
1 0000 90 30 00 INICIO: MOV DPTR,#3000H
2 0003 65 E0 XRL A,A
3 0005 A9 10 MOV R1,10H
4 0007 F0 LAZO: MOVX @DPTR,A
5 0008 A3 INC DPTR
6 0009 D9 FC DJNZ R1,LAZO
7 000B CONTINUA:
Algoritmo 4.3.- Códigos de operación y bytes en memoria (lenguaje de máquina).
La dificultad de escribir un programa directamente en lenguaje de máquina radica en:
a)La complejidad de seguir la pista para la ubicación de las instrucciones durante la redacción del
programa.
b)La necesidad de reubicar la dirección de salto o transferencia cuando (ante la presencia de un error) hay
que añadir instrucciones al programa.
c)El colocar una dirección a cada instrucción (sin utilizar el lenguaje simbólico) implica que para que
dicho programa funcione a partir de otra dirección de memoria es necesario direccionarlo de nuevo por
parte del programador.
Por las dificultades anteriores han sido elaborados programas traductores, capaces de llevar formas o
símbolos más comprensibles por el hombre al lenguaje de máquina.
Los lenguajes de programación que constituyen entradas a los traductores reciben el nombre de lenguaje
fuente mientras que los lenguajes producto a la traducción de un lenguaje fuente, reciben el nombre de
lenguaje objeto.
Cuando el lenguaje fuente es sólo una mera representación simbólica de la secuencia de instrucciones del
lenguaje de máquina, la traducción a realizar es simple y se dice que sólo requiere de un ensamblaje. Al
programa que realiza esta traducción se le llama ensamblador. Usualmente cada instrucción en lenguaje
ensamblador genera una instrucción en lenguaje de máquina, como se muestra en la fig. 4.2.
Figura 4.2.- El ensamblador como traductor del lenguaje fuente.
Programa en
lenguaje fuente
Ensamblador Programa en
lenguaje de máquina
5. Fundamentos del lenguaje ensamblador
239
Cuando el lenguaje fuente es un lenguaje de alto nivel (PASCAL, C, etc.) y el lenguaje destino es el
código de máquina, al traductor se le llama compilador.
Un ensamblador típico consta de dos pasos: el primero calcula la longitud de cada instrucción y actualiza
un puntero de posición. La tabla de símbolos también se elabora en la primera fase, disponiendo todos los
nombres y referencias simbólicas en orden alfabético. Cada nombre se coloca en la tabla tal como se
encuentra; por consiguiente, un símbolo incluido en un campo de operandos entra en la tabla si antes no
ha aparecido como nombre. En este caso, el símbolo se encontrará más allá de la posición actual. Al final
de la primera fase todos los símbolos de la tabla deben haber recibido un número de identificación. Si un
símbolo no ha sido resuelto, constituirá una referencia no completada, lo que origina errores. El
ensamblador lee después las líneas de sentencias originales una vez más, construyendo esta vez el código
en lenguaje de máquina, convirtiendo las direcciones de referencia a la memoria y otros campos con los
valores tomados del campo de operandos de la línea original o con valores simbólicos extraídos de la
tabla de símbolos.
Existe una amplia variedad de ensambladores, de hecho pueden existir diferentes ensambladores para
trabajar en un mismo microprocesador o en un mismo sistema de cómputo. No obstante, las posibilidades
de diferentes ensambladores son muy similares por lo que se analiza la comprensión sobre los principios
básicos sin entrar en detalles particulares.
4.2.5.- Las directivas del ensamblador (Pseudo instrucciones).
Cualquier ensamblador posee determinadas instrucciones que son un conjunto de operaciones no
generativas que no producen código en lenguaje de máquina y cuya función fundamental es especificar,
como parte del programa en lenguaje ensamblador, donde deben localizarse las variables y diferentes
partes del programa en la memoria RAM y ROM. A tal grupo de instrucciones se les llama directivas del
ensamblador.
Las directivas del ensamblador se clasifican en las siguientes categorías:
(a).- Control de segmento: Permite definir segmentos donde se localiza código de programa y constantes
o variables en memoria de datos.
(b).- Definición de símbolos: Permite crear símbolos que pueden usarse para representar registros,
números y direcciones.
(c).- Inicialización de memoria: Permite inicializar zona de códigos o constantes, generalmente del tipo
byte o palabras.
(d).- Reserva de memoria: Reservan espacio en memoria (generalmente en memoria de datos).
(e).- Enlace de programas: Permite ensamblar módulos de programas independientes, de forma tal que
puedan intercambiarse referencias y variables entre ellas.
(f).- Control de direcciones: Permite definir determinada zona de direcciones, donde se coloca código o
datos.
Las directivas básicas del ensamblador son:
ORG: El operando asociado con esta directiva se interpreta como una dirección (típicamente de 16 bits).
Esta define una dirección a partir de la cual será colocado el código de operación de la instrucción que
siga a la directiva. Las instrucciones serán colocadas en direcciones sucesivas hasta que se defina la
6. Fundamentos del lenguaje ensamblador
240
próxima directiva. Si no se utiliza, queda implícita la instrucción ORG 00H. Es una directiva de control
de direcciones.
Ejemplo 4.1:
ORG 100H
ORG RESET ; RESET puede ser una expresión absoluta o relocalizable
DS: Se utiliza para reservar bytes en memoria RAM (variables). Viene acompañada de una etiqueta que
identifica una dirección en RAM y de un número a la derecha indicador del número de bytes de datos que
deben reservarse y en los cuales no se almacenan datos después de su definición ( la directiva DSW
reserva palabras de 16 bits).
Ejemplo 4.2:
Etiqueta: DS 20 ; Etiqueta identifica la dirección a partir de la cual se reservan los bytes
; en este caso se reservan 20 bytes.
DB: La directiva de definición de bytes es utilizada para almacenar cadenas y tablas. A través de ella se le
indica al ensamblador que interprete al operando como un dígito (menor o igual a 255) que debe ser
almacenado en un byte de memoria ROM. Algunos ensambladores permiten almacenar el equivalente
ASCII de una cadena de caracteres ( la directiva DW reserva palabras de 16 bits). Es una directiva de
inicialización de memoria.
Ejemplo 4.3:
Etiqueta: DB „CADENA‟ ; El ensamblador coloca en la posición el código ASCII equivalente a la
; cadena de caracteres CADENA.
Tabla: DB 0,1,‟A‟
EQU: Permite asignar un valor a determinada etiqueta o nombre de un símbolo. Puede ser usarse para
definir operandos, registros, expresiones o direcciones. Los nombres de símbolos definidos con esta
directiva no pueden redefinirse o cambiarse. Es una directiva de definición de símbolos.
Ejemplo 4.4:
Acumulador EQU A
Contador_Max EQU 100
CODE, DATA, XDATA: Permiten asignar direcciones a determinado símbolo. Los símbolos definidos con
esta directiva no pueden redefinirse. Son directivas de control de segmento.
Ejemplo 4.5:
Reset CODE 0000h ; La dirección en memoria de programa puede ser 0000H a FFFFH
Tabla_7seg DATA 20h ; La dirección en memoria de datos puede ser 00H a FFH
Datos_ext XDATA 1000h ; Define una dirección en memoria de datos externa, puede ser
; 0000H a FFFFH.
DSEG, CSEG: Definen segmentos absolutos en memoria de datos y programa respectivamente.
7. Fundamentos del lenguaje ensamblador
241
Ejemplo 4.6:
CSEG AT 3000H
DSEG AT 20H
SEGMENT: Permite definir segmentos relativos, cuya posición en memoria quedará finalmente
establecida por el enlazador.
Ejemplo 4.7:
PILA SEGMENT DATA ; declara segmento
RSEG PILA ; selecciona segmento
DS 10H ; reserva 16 bytes
END: Define el final de un programa o módulo.
4.2.6.- Sistema de desarrollo KEIL.
Un sistema de desarrollo está compuesto de varios programas de aplicación que se pueden usar para crear
aplicaciones en un microcontrolador. Se puede usar el ensamblador para ensamblar un programa, el
compilador para compilar un programa en código C a un archivo objeto, y se puede usar el enlazador para
crear un módulo objeto absoluto deseable, a partir de un emulador.
Cuando se usa el KEIL, el ciclo de desarrollo de un proyecto es el mismo que un proyecto de desarrollo
de cualquier software, el cual consta de los siguientes pasos:
1.- Crear los archivos en C o ensamblador.
2.- Compilar o ensamblar los archivos fuentes.
3.- Corregir los errores en el archivo fuente.
4.- Enlazar ficheros objeto del compilador y ensamblador.
5.- Probar la eficiencia de la aplicación.
El diagrama en bloques de la figura 4.3 muestra una herramienta de desarrollo para la serie MCS‟51.
Como se muestra, los archivos se crean con Vision/51 IDE y entonces pasan al compilador C51 o el
ensamblador A51. El compilador y el ensamblador procesan los archivos fuente y crean archivos objetos
relocalizables.
El archivo objeto creado por el compilador y el ensamblador puede usarse por LIB51 (controlador de
bibliotecas) para crear una biblioteca. Una biblioteca es un conjunto de programas ordenados,
especialmente formateados de módulos objeto, que el enlazador puede procesar. Cuando el enlazador
procesa una biblioteca, sólo se utilizan los módulos objetos necesarios para la creación del programa.
Los archivos objetos creados por el compilador y el ensamblador, y los archivos de biblioteca creados por
el controlador de bibliotecas se procesan por el enlazador para crear un módulo objeto absoluto. Un
archivo o módulo objeto absoluto es un archivo objeto cuyo código no es relocalizable, ello es, los
códigos residen en localizaciones fijas.
8. Fundamentos del lenguaje ensamblador
242
El archivo objeto absoluto creado por el enlazador se usa para programar la ROM u otros dispositivos de
memoria. Este puede usarse, adicionalmente, con el dScope-51 (depurador/ simulador) o con un
emulador.
El depurador/ simulador dScope-51 es un programa de alto nivel que permite una depuración rápida y
fiable. El depurador contiene un simulador y un target que permite simular el 8051, incluyendo
periféricos. Definiendo configuraciones específicas, se pueden simular los atributos y periféricos que
posee la serie MCS‟51.
El RTX-51 es un sistema multitarea en tiempo real que simplifica el diseño de un sistema, la
programación y depuración (utilizada para aplicaciones complejas).
Figura 4.3.- Estructura de la herramienta de desarrollo KEIL.
Vision/51
Compilador
C51
Macro
ensamblador
A51
Biblioteca
C Controlador
de biblioteca
LIB51
Sistema de
operación en
tiempo real
RTX51
Linker BL51 para banco de códigos.
Depurador (DScope-51)
Simulador de
periférico y CPU Monitor-51
Emulador y
programación de
EPROM
9. Fundamentos del lenguaje ensamblador
243
Para crear un proyecto con µVision2 (ver fig. 4.4) se ejecuta Project – New Project…. El cual solicita el
nombre del archivo de proyecto. Previamente se debe crear una nueva carpeta con el icono Create New
Folder.
Si el nombre del archivo es Projecto1, µVision2 crea un nuevo archivo de proyecto con el nombre
PROJECT1.UV2 el cual contiene un target implícito y un nombre de grupo de archivos. Estos se pueden
ver en Project Window – Files.
Posteriormente, en el menú Project – Select Device for Target se selecciona el CPU a utilizar. Si está
disponible, se puede seleccionar un manual aplicando Project Window – Books.
Para crear nuevos archivos fuente se ejecuta File – New. Este abre un editor donde se puede escribir el
código fuente. El código fuente que se crea se debe adicionar al proyecto usando Add Files en Project
Window – Files.
Se pueden definir los parámetros relevantes del hardware y los componentes internos del dispositivo
seleccionado usando el comando Options for Target ( es una de las opciones más importantes del
sistema de desarrollo), ello incluye:
- Frecuencia de reloj.
- Memoria interna.
- Memoria externa, etc.
El comando Option - Build Target traslada el archivo fuente a código hexadecimal, en caso de que
existan errores, en la ventana Output Window - Build aparecerán los errores de compilación.
Después de corregir los errores de sintaxis, se procede a la puesta a punto del sistema (debugger)
utilizando las herramientas de µVision2.
Una vez que se ha concluido la puesta a punto del proyecto, se debe crear el archivo INTEL HEX con el
que se programará la EPROM interna del microcontrolador (o simulador), para ello se debe habilitar la
opción Create HEX en Options for Target - Output.
Ejemplo 4.8:
Utilizando directivas, establezca un programa a partir de la dirección 0000H. Tal programa utilizará una
constante (VALOR_CONST) cuyo valor debe ser 10H. Establezca tres tablas, una a partir de la dirección
300H, una en segmento relativo y otra en 500H respectivamente, almacenando valores como bytes,
palabras y caracteres. Defina una subrutina a partir de la dirección 600H y reserve valores en RAM (a
partir de 20H) de la siguiente forma: una variable (VAR) de 1 byte de longitud y una cadena de 10 bytes.
Solución:
NAME EJEMPLO_48
VALOR_CONST EQU 10H ; se define una constante
RESET CODE 0000H ; define dirección de código de inicio
CSEG AT 300H ; en memoria de programa (300H)
Tabla_1: DB 04h ; Se definen bytes a partir de 300H
DB 05h
DB 0ffh
10. Fundamentos del lenguaje ensamblador
244
Codigo_tabla2 SEGMENT CODE ; En memoria de programa, relocalizable.
RSEG Codigo_tabla2
Tabla_2:
DW 4025h
DW 0ff03h
DW 450Eh ;
CSEG AT 500h ; en memoria de programa (500H)
Tabla_3:
DB 'CADENA DE CARACTERES' ; Se define cadena que será codificada en ASCII
DSEG AT 20H ; reserva variable
VAR:
DS 1 ; 1 byte en la dirección 20h
CADENA:
DS 10D ; Se reservan 10 bytes
; Se define la dirección de inicio del programa
CSEG AT RESET ; dirección absoluta en memoria de programa
CALL SUBRUTINA ; Identificando al programa
; Dirección de la subrutina a partir de la 600H
CSEG AT 600H
SUBRUTINA:
MOV A,VALOR_CONST;
MOV VAR,A;
RET;
END ; Fin del programa
Figura 4.4.- Detalle del depurador de KEIL en el sistema Vision-2.
12. Fundamentos del lenguaje ensamblador
246
XREF SYMBOL TABLE LISTING
---- ------ ----- -------
N A M E T Y P E V A L U E ATTRIBUTES / REFERENCES
CADENA . . . . . . D ADDR 0021H A 25#
CODIGO_TABLA2. . . C SEG 0006H REL=UNIT 10# 11
EJEMPLO_1. . . . . N NUMB ----- 1
RESET. . . . . . . C ADDR 0000H A 3# 30
SUBRUTINA. . . . . C ADDR 0600H A 31 35#
TABLA_1. . . . . . C ADDR 0300H A 6#
TABLA_2. . . . . . C ADDR 0000H R SEG=CODIGO_TABLA2 12#
TABLA_3. . . . . . C ADDR 0500H A 18#
VALOR_CONST. . . . N NUMB 0010H A 2# 36
VAR. . . . . . . . D ADDR 0020H A 22# 37
REGISTER BANK(S) USED: 0
ASSEMBLY COMPLETE. 0 WARNING(S), 0 ERROR(S)
Nótese como la directiva en ensamblador:
Codigo_tabla2 SEGMENT CODE ; En memoria de programa, relocalizable.
RSEG Codigo_tabla2
ha generado bytes en memoria de programa que coinciden con el programa en RESET, lo anterior lo
resuelve el enlazador o a través de la definición de direcciones absolutas.
4.2.7.-El enlazador( Linker).
El enlazador es una herramienta muy útil cuando se trabajan programas muy largos que se realizan a
partir de varias secciones de código o subprogramas. Su función fundamental es aceptar varios módulos
objetos generados a partir del ensamblador, resolver las referencias a variables externas, incorporar
subrutinas a partir de determinada biblioteca y cargar cada módulo objeto en cualquier lugar de memoria
que se desee. Si el algoritmo 4.1 se quisiera definir a partir de la dirección 4000H, resulta:
PUNTERO EQU 4000H
2 4000 90 30 00 INICIO: MOV DPTR,PUNTERO
3 4003 65 E0 XRL A,A
4 4005 A9 10 MOV R1,10H
5 4007 F0 LAZO: MOVX @DPTR,A
6 4008 A3 INC DPTR
7 4009 D9 FC DJNZ R1,LAZO
8 400B CONTINUA:
Nótese como las direcciones de la tabla de símbolos cambian por la adición de la dirección de inicio
4000H:
Nombre Posición
8 CONTINUA 400B
2 INICIO 4000
5 LAZO 4007
Nótese además como los valores definidos a partir de directivas absolutas (EQU) no cambian. Los
símbolos y direcciones que cambian cuando el programa es ubicado en una nueva dirección se llaman
direcciones y símbolos relocalizables.
13. Fundamentos del lenguaje ensamblador
247
A partir de los archivos objetos generados por el ensamblador, el enlazador procesa los mismos y genera
los siguientes archivos:
(a).- Archivo listado (.LST): Contiene información acerca de cada paso ejecutado en el proceso de enlace
y localización de módulos, tabla de códigos localizados en memoria, lista de segmentos y símbolos y
referencias cruzadas generadas por las directivas PUBLIC y EXTERN.
(b).- Archivo objeto (.OBJ): Es utilizado por el depurador o debugger en la fase de depuración del
programa.
(c).- Archivo hexadecimal (.HEX): Es el resultado de la conversión del archivo objeto en hexadecimal,
creando un archivo con el formato Intel HEX para la programación de la ROM interna o externa del
sistema microcomputador.
Para facilitar el trabajo con el enlazador, un posible formato para la construcción de módulos objeto se
muestra a continuación:
-----------------------------------------------
; Importar símbolos externos
-----------------------------------------------
; Exportar símbolos a otros módulos
-----------------------------------------------
; Declaración de segmentos y variables
-----------------------------------------------
; Declaración de constantes
-----------------------------------------------
; Programa en ensamblador
-----------------------------------------------
Ejemplo 4.9:
Como ejemplos de como trabaja el enlazador, analicemos los programas( PROG_PRIN y
SUMA_MULTIPLE) que se muestran a continuación:
NAME PRINCIPAL
;Este programa llenara dos zonas de
; RAM para ser sumadas
; Biblioteca de simbolos externos
EXTRN CODE (SUMARA) ; módulo definido externamente
PUBLIC DIR_DATOS_A ; variables globales
PUBLIC DIR_DATOS_B
PUBLIC CANT_DATOS
; Define zona de memoria de datos
DIR_DATOS_A DATA 40H
DS 10D;
DSEG AT 50H
DIR_DATOS_B:
DS 10D;
14. Fundamentos del lenguaje ensamblador
248
; Constante
CANT_DATOS EQU 0AH
CSEG AT 00H
RESET:
MOV R1,#DIR_DATOS_A ; Se inicializa punteros
MOV R0,#DIR_DATOS_B
MOV R3,#CANT_DATOS ; Se inicializa contador
LLENA:
MOV @R1,#03 ; Se llena zona de datos
MOV @R0,#05
INC R0
INC R1
DJNZ R3,LLENA
CALL SUMARA
END
La subrutina, como módulo independiente, puede crearse como sigue:
NAME SUMA_MULTIPLE
; Sumara datos en multiple precision
; Biblioteca de simbolos externos
EXTRN DATA (DIR_DATOS_A)
EXTRN DATA (DIR_DATOS_B)
EXTRN NUMBER (CANT_DATOS)
PUBLIC SUMARA
SUMA_MULTIPLE SEGMENT CODE
RSEG SUMA_MULTIPLE
SUMARA:
MOV R0,#DIR_DATOS_B ; Se definen los datos inicializados
MOV R1,#DIR_DATOS_A ; en programa externo
MOV R3,#CANT_DATOS
CLR CY
CONT:
MOV A,@R0
ADDC A,@R1
MOV @R1,A
INC R0
INC R1
DJNZ R3,CONT
RET
END
El resultado que genera el ensamblador sería, para el programa principal:
MACRO ASSEMBLER A51 V6.02
OBJECT MODULE PLACED IN .principal.OBJ
ASSEMBLER INVOKED BY: C:KEILC51BINA51.EXE .principal.asm SET(SMALL) DEBUG EP
LOC OBJ LINE SOURCE
1 NAME PRINCIPAL
15. Fundamentos del lenguaje ensamblador
249
2 ;Este programa llenara dos zonas de
3 ; RAM para ser sumadas
4
5 ; Biblioteca de simbolos externos
6
7 EXTRN CODE (SUMARA)
8 PUBLIC DIR_DATOS_A
9 PUBLIC DIR_DATOS_B
10 PUBLIC CANT_DATOS
11
12 ; Define zona de memoria de datos
0040 13 DIR_DATOS_A DATA 40H
0000 14 DS 10D;
15
---- 16 DSEG AT 50H
0050 17 DIR_DATOS_B:
0050 18 DS 10D;
19
20 ; Constante
000A 21 CANT_DATOS EQU 0AH
22
---- 23 CSEG AT 00H
0000 24 RESET:
0000 7940 25 MOV R1,#DIR_DATOS_A ; Se inicializa punteros
0002 7850 26 MOV R0,#DIR_DATOS_B
0004 7B0A 27 MOV R3,#CANT_DATOS ; Se inicializa contador
0006 28 LLENA:
0006 7703 29 MOV @R1,#03 ; Se llena zona de datos
0008 7605 30 MOV @R0,#05
000A 08 31 INC R0
000B 09 32 INC R1
000C DBF8 33 DJNZ R3,LLENA
000E 120000 F 34 CALL SUMARA
35 END
SYMBOL TABLE LISTING
------ ----- -------
N A M E T Y P E V A L U E ATTRIBUTES
CANT_DATOS . . . . N NUMB 000AH A
DIR_DATOS_A. . . . D ADDR 0040H A
DIR_DATOS_B. . . . D ADDR 0050H A
LLENA. . . . . . . C ADDR 0006H A
PRINCIPAL. . . . . N NUMB -----
RESET. . . . . . . C ADDR 0000H A
SUMARA . . . . . . C ADDR ----- EXT
REGISTER BANK(S) USED: 0
ASSEMBLY COMPLETE. 0 WARNING(S), 0 ERROR(S)
El resultado del programa SUMA_MÚLTIPLE, después del proceso de ensamblaje sería:
MACRO ASSEMBLER A51 V6.02
OBJECT MODULE PLACED IN .secundario.OBJ
ASSEMBLER INVOKED BY: C:KEILC51BINA51.EXE .secundario.asm SET(SMALL) DEBUG EP
16. Fundamentos del lenguaje ensamblador
250
LOC OBJ LINE SOURCE
1 NAME SUMA_MULTIPLE
2 ; Sumara datos en multiple precision
3
4 ; Biblioteca de simbolos externos
5 EXTRN DATA (DIR_DATOS_A)
6 EXTRN DATA (DIR_DATOS_B)
7 EXTRN NUMBER (CANT_DATOS)
8 PUBLIC SUMARA
9
10 SUMA_MULTIPLE SEGMENT CODE
---- 11 RSEG SUMA_MULTIPLE
12
0000 13 SUMARA:
0000 7800 F 14 MOV R0,#DIR_DATOS_B ; Se definen datos inicializados
0002 7900 F 15 MOV R1,#DIR_DATOS_A ; en programa externo
0004 7B00 F 16 MOV R3,#CANT_DATOS
0006 C2D7 17 CLR CY
0008 18 CONT:
0008 E6 19 MOV A,@R0
0009 37 20 ADDC A,@R1
000A F7 21 MOV @R1,A
000B 08 22 INC R0
000C 09 23 INC R1
000D DBF9 24 DJNZ R3,CONT
000F 22 25 RET
26 END
SYMBOL TABLE LISTING
------ ----- -------
N A M E T Y P E V A L U E ATTRIBUTES
CANT_DATOS . . . . N ADDR ----- EXT
CONT . . . . . . . C ADDR 0008H R SEG=SUMA_MULTIPLE
El resultado del enlace entre ambos módulos resulta en el siguiente archivo generado por el enlazador:
BL51 BANKED LINKER/LOCATER V4.02
BL51 BANKED LINKER/LOCATER V4.02, INVOKED BY:
C:KEILC51BINBL51.EXE principal.obj, secundario.obj TO enlace RAMSIZE (256)
INPUT MODULES INCLUDED:
principal.obj (PRINCIPAL)
secundario.obj (SUMA_MULTIPLE)
LINK MAP OF MODULE: enlace (PRINCIPAL)
TYPE BASE LENGTH RELOCATION SEGMENT NAME
-----------------------------------------------------
* * * * * * * D A T A M E M O R Y * * * * * * *
REG 0000H 0008H ABSOLUTE "REG BANK 0"
0008H 0048H *** GAP ***
17. Fundamentos del lenguaje ensamblador
251
DATA 0050H 000AH ABSOLUTE
* * * * * * * C O D E M E M O R Y * * * * * * *
CODE 0000H 0011H ABSOLUTE
CODE 0011H 0010H UNIT SUMA_MULTIPLE
SYMBOL TABLE OF MODULE: enlace (PRINCIPAL)
VALUE TYPE NAME
----------------------------------
------- MODULE PRINCIPAL
N:000AH PUBLIC CANT_DATOS
D:0040H PUBLIC DIR_DATOS_A
D:0050H PUBLIC DIR_DATOS_B
C:0006H SYMBOL LLENA
N:0000H SYMBOL PRINCIPAL
C:0000H SYMBOL RESET
C:0000H LINE# 25
C:0002H LINE# 26
C:0004H LINE# 27
C:0006H LINE# 29
C:0008H LINE# 30
C:000AH LINE# 31
C:000BH LINE# 32
C:000CH LINE# 33
C:000EH LINE# 34
------- ENDMOD PRINCIPAL
------- MODULE SUMA_MULTIPLE
C:0011H SEGMENT SUMA_MULTIPLE
C:0011H PUBLIC SUMARA
C:0019H SYMBOL CONT
B:00D0H.7 SYMBOL CY
C:0011H LINE# 14
C:0013H LINE# 15
C:0015H LINE# 16
C:0017H LINE# 17
C:0019H LINE# 19
C:001AH LINE# 20
C:001BH LINE# 21
C:001CH LINE# 22
C:001DH LINE# 23
C:001EH LINE# 24
C:0020H LINE# 25
------- ENDMOD SUMA_MÚLTIPLE
INTER-MODULE CROSS-REFERENCE LISTING
------------------------------------
NAME . . . . USAGE MODULE NAMES
----------------------------------
CANT_DATOS . NUMB; PRINCIPAL SUMA_MULTIPLE
DIR_DATOS_A. DATA; PRINCIPAL SUMA_MULTIPLE
DIR_DATOS_B. DATA; PRINCIPAL SUMA_MULTIPLE
SUMARA . . . CODE; SUMA_MULTIPLE PRINCIPAL
LINK/LOCATE RUN COMPLETE. 0 WARNING(S), 0 ERROR(S)
18. Fundamentos del lenguaje ensamblador
252
El programa PROG_PRIN utiliza dos direcciones de datos (DIR_DATOS_A, DIR_DATOS_B) y una
constante (CANT_DATOS) que son compartidas con la subrutina SUMA_MÚLTIPLE. A través de la
directiva PUBLIC se indica que las etiquetas (constantes) definidas a la derecha pueden ser utilizadas por
otros programas. El programa principal hace un llamado a subrutina que no está en el módulo objeto y
que es definida en otro módulo, lo que se indica con la pseudoinstrucción EXTRN.
Para la subrutina SUMA_MULTIPLE las direcciones DIR_DATOS_A, DIR_DATOS_B y la constante
CANT_DATOS serán definidas externamente. La subrutina SUMARA es PUBLIC pues es referenciada
por PROG_PRIN( un módulo externo a ella).
El enlazador cargará PROG_PRIN y a partir del último código colocará la primera instrucción de
SUMARA( la que posee un desplazamiento en el PC de 0011H). Todas las instrucciones de SUMARA
serán colocadas en direcciones desplazadas en 11h valores, en nuevas direcciones de memoria.
4.2.8.-La creación de un módulo en ensamblador.
Los módulos, como las subrutinas, deben brindar información que el usuario necesite sin necesidad de
examinar la arquitectura interna del programa, las especificaciones típicas que deben definirse son:
a)Descripción del propósito del módulo.
b)Longitud en bytes de la subrutina.
c)Lista de parámetros de entrada.
d)Lista de parámetros de salida.
e)Registros y localizaciones de memoria utilizadas (útil cuando el módulo se use como respuesta a
interrupción, donde deben salvarse todos los registros implicados), en esta última se debe definir si las
direcciones son o no relocalizables.
f)Un ejemplo de valores de las variables de salida ante la definición de variables a la entrada.
g)Definir la biblioteca de símbolos externos.
Ejemplo 4.10:
Un ejemplo de como puede definirse un módulo se expone en el siguiente programa:
NAME CONVERSION_BCD_7SEG
;****************************************************************
; Este programa permite convertir un valor en BCD *
; a su equivalente 7 segmentos *
;****************************************************************
;*BYTES QUE OCUPA EN MEMORIA: 18 BYTES *
;****************************************************************
;*PARAMETROS DE ENTRADA: DIR_DATO_BCD:direccion donde debe estar*
;* colocado el valor en BCD a convertir *
;* con formato 0NH donde N es el valor en BCD *
;****************************************************************
19. Fundamentos del lenguaje ensamblador
253
;*PARAMETROS DE SALIDA: Valor equivalente a 7 segmentos en *
;* DIR_DATO_BCD *
;****************************************************************
;*REGISTROS UTILIZADOS: A,R0,PC *
;****************************************************************
;*LOCALIZACION DE MEMORIA: DIR_DATO_BCD, definida por quien *
;* llame a este modulo *
;****************************************************************
;*EJEMPLO: Debe ser definido por otro modulo: *
;* PUBLIC DIR_DATO_BCD *
; DSEG AT 50H *
; DIR_DATO_BCD: *
; DS 1D; *
;* *
;* Si (50H)=03 devuelve (50H)=66h *
;* Forma de llamado: CALL BCD_7SEG *
;****************************************************************
;*NOTA: La direccion donde se coloque la tabla puede ser *
;* relocalizada, pero siempre a continuacion de RET *
;****************************************************************
EXTRN DATA (DIR_DATO_BCD)
BCD_7SEG SEGMENT CODE
RSEG BCD_7SEG
BCD_7SEG:
MOV R0,#DIR_DATO_BCD
MOV A,@R0
ADD A,#02H ; Salto 2 bytes de código (dos próximas instrucciones)
MOVC A,@A+PC
MOV @R0,A
RET
; a continuación de la instrucción RET
POSIC_TABLA SEGMENT CODE
RSEG POSIC_TABLA
dw 3344h ; posibles códigos equivalentes 7_seg
dw 5566h
dw 7788h
dw 99aah
dw 0bbcch
END
4.3.- Algunas ideas para la programación en ensamblador.
La programación en ensamblador es una tarea ardua y laboriosa, aunque algunos conceptos que se presentan
aquí pueden resultar evidentes, son útiles para la programación en ensamblador.
(a).- Establecer un registro a cero: Un registro puede ser puesto a cero a través de las instrucciones: MOV
REG,00 ó XRL REG,REG. Para la comprensión de la segunda opción debe conocerse la función OR
EXCLUSIVO.
El or exclusivo devuelve como resultado un "1" si solo uno de los operandos vale 1, como se aprecia a
continuación:
20. Fundamentos del lenguaje ensamblador
254
XOR 0 1
0 0 1
1 1 0
De lo anterior se deduce que el or exclusivo de un número consigo mismo es cero. Un ejemplo se muestra a
continuación:
1 0 1 0
XOR 1 1 0 0
-----------
0 1 1 0
Para colocar a cero un registro puede utilizarse también la instrucción SUB REG,REG (sustracción de un
número por el mismo).
(b).- Complementar un bit: A menudo puede ser necesario cambiar el estado de un bit( especialmente para
trabajar sobre banderas establecidas por programa o sobre terminales de puerto, como puede ser el control
de un led en un reloj digital), para ello puede utilizarse el or exclusivo. La función or exclusivo de
cualquier bit con el bit correspondiente en "1" complementa dicho bit.
Ejemplo 4.11:
Complemente el bit 1 y 5 de un valor almacenado en un registro de 8 bits:
REGISTRO X X X X X X X X
XOR 0 0 1 0 0 0 1 0
-----------------------
RESULTADO X X Xc
X X X Xc
X
Donde Xc
representa el complemento de X.
(c).- Setear un bit: Para ello es útil la función OR, la cual da como resultado un "1" si al menos uno de los
operandos es "1":
OR 0 1
0 0 1
1 1 1
Por tanto, el OR de cualquier información contenida en cualquier bit con "1" resultará un 1.
Ejemplo 4.12:
Setee los bits 1 y 5 de la información contenida en cualquier registro.
REGISTRO X X X X X X X X
OR 0 0 1 0 0 0 1 0
----------------------
RESULTADO X X 1 X X X 1 X
Nótese como la información contenida en los bits sobre los que se hace el OR con 0, mantienen su valor.
21. Fundamentos del lenguaje ensamblador
255
(d).- Resetear un bit: Para ello puede utilizarse la función AND, en la misma basta que uno de los
operandos sea cero para que el resultado sea cero:
AND 0 1
0 0 0
1 0 1
Ejemplo 4.13:
Coloque los bits 1 y 5 de un registro a cero.
REGISTRO X X X X X X X X
AND 1 1 0 1 1 1 0 1
------------------------
RESULTADO X X 0 X X X 0 X
Nótese como la información contenida en los bits sobre los que se hace el AND con "1" mantienen su valor.
(e).- Realizar la sustracción a través de suma: Algunos dispositivos (como algunos microcontroladores) no
poseen instrucciones de sustracción. Un método alternativo es realizar la sustracción a través de la suma,
para lo cual la operación:
MINUENDO
- SUSTRAENDO
---------------------
RESTA
Puede realizarse ejecutando los siguientes pasos:
a)Se realiza el complemento a 1 del minuendo.
b)Se le suma a la anterior operación el sustraendo.
c)Se realiza el complemento a uno del resultado.
Ejemplo 4.14:
Realice la siguiente operación:
01001001B - 00110110B
a)Se realiza el complemento a uno del minuendo:
10110110B
b)Se le suma el sustraendo:
10110110B
+00110110B
---------------
11101100B
22. Fundamentos del lenguaje ensamblador
256
c)Se le determina el complemento a uno del resultado:
00010011B
Y este es el resultado de la sustracción planteada.
Un problema será determinar cuándo la operación anterior no da un resultado apropiado ( préstamo en la
operación de sustracción normal). Para ello el acarreo se utiliza como indicador.
Ejemplo 4.15:
Realice la siguiente operación:
00010000B - 00100000B
a)Se realiza el complemento a uno del minuendo:
11101111B
b)Se le suma el sustraendo:
11101111B
+00100000B
---------------
CY=1 00001111B Con un acarreo de "1"
c)Se le determina el complemento a uno del resultado:
11110000B
De lo anterior se puede deducir porqué se utiliza la puesta a “1” de la bandera acarreo como indicador
similar a la solicitud de préstamo cuando la operación de sustracción se realiza por el microprocesador.
(f).- Multiplicando y dividiendo por potencias de dos: La multiplicación y la división son operaciones
aritméticas de uso común para la solución a problemas exigidos a un sistema de cómputo, su ejecución tarda
varios períodos de reloj (existen microprocesadores que no lo tienen incluído y se debe implementar por
programa).
Se puede obtener( basado en la posición relativa de las cifras que conforman el número) el producto y la
división de determinado valor a través de la simple rotación.
Multiplicación: El rotar un valor a la izquierda permite obtener el producto del valor almacenado por dos,
para multiplicar por N( donde N tiene que ser una potencia de dos) se puede utilizar:
PRODUCTO = MULTIPLICANDO(N)
donde N = 2n
y n = Número de rotaciones a la izquierda.
Ejemplo 4.16:
23. Fundamentos del lenguaje ensamblador
257
Multiplique por 16 el siguiente dato: 00000100B=4D
N=16=24
Como n=4, entonces la solución sería rotar el dato cuatro veces a la izquierda, de lo que resulta:
01000000B=64D
División: Se realiza rotando a la derecha el dividendo n unidades, para lo cual se puede aplicar la siguiente
fórmula:
COCIENTE = DIVISOR / N
Donde N = 2n
y n = Número de rotaciones a la derecha.
Ejemplo 4.17:
Divida por 64 el siguiente valor: 01001010B
N=64= 26
Como n es seis, entonces se debe rotar seis unidades a la derecha, de lo que resulta:
COCIENTE = 00000001B
Se debe tener en cuenta que la rotación puede conllevar a la pérdida de información (como en el ejemplo
anterior). Tal pérdida puede evitarse con la utilización de múltiple precisión en el manejo de datos.
(g) La multiplicación de números empaquetados en BCD por dos: Para ello lo que se hace es doblar el
número( adicionar el número con él mismo) y posteriormente se realiza el ajuste decimal del resultado (el
mayor valor en ocho bits será 99H).
(h) La división de números empaquetados en BCD por dos: Para ello se rota a la derecha el número y se le
sustrae tres a cualquier dígito que sea ocho o mayor.
(i).- Redondeo de números: Este tipo de aplicación se desarrolla fundamentalmente cuando se trata el dato
en múltiple precisión (ver sección 4.4).
Para redondear un número binario se utiliza el siguiente principio: Si el bit más significativo del byte que
será truncado es 1 (128 o mayor si se interpreta como entero sin signo), se le añade 1 al byte más
significativo adyacente.
Ejemplo 4.18:
Redondee a un byte los números siguientes, resultados de una suma:
MSByte LSByte
00101100 10010000
Como el bit MSB del byte menos significativo es 1, se incrementa en 1 el byte más significativo, siendo el
resultado:
24. Fundamentos del lenguaje ensamblador
258
00101101
También se puede redondear números empaquetados en BCD. Para realizar este tipo de operación se tiene
en cuenta que si el dígito más significativo que será truncado es 5 o mayor, se le añade 1 al byte adyacente
más significativo, ejecutando posteriormente el ajuste decimal.
Ejemplo 4.19:
Redondee a dos dígitos los cuatro dígitos empaquetados en BCD que se muestran a continuación:
MSByte LSByte
01001001 01100010
Se debe eliminar el byte menos significativo, como el número que representa el dígito más significativo a
truncar( 6D=0110) es mayor que 5, se suma 1 al dígito inmediato superior (1001).
01001001
+ 1
------------
01001010
Posteriormente se debe realizar el ajuste decimal (sumar 6, pues el resultado es un código erróneo) de lo que
resulta:
01010000=50H
4.4.- Ejemplos de programas en ensamblador.
Sistemas en múltiple precisión:La precisión simple aplicada a los microprocesadores significa el tratamiento
de datos con un número de bits cuyo tamaño coincida con el tamaño de los registros de propósito general
del microprocesador utilizado para el diseño del sistema. En la presente sección se trata como manipular
datos que poseen un número de bits superiores al formato básico de trabajo del microprocesador, para lo
que se tomará como referencia el tratamiento sobre un tamaño de 8 bits, lo cual puede generalizarse a un
número superior de bits.
4.4.1.- La adición y la sustracción.
La adición y la sustracción en múltiple precisión implica, básicamente, conservar el acarreo o el préstamo
de adiciones o sustracciones del byte contiguo de orden inferior y sumarlo o sustraerlo a la posición del bit
menos significativo del byte de orden superior.
Si se interpreta el dato como entero con signo, entonces el bit más significativo del byte más significativo
representará el signo en un dato de orden n, siendo los bytes de orden inferior representaciones de simples
dígitos binarios.
Ejemplo 4.20:
Realice la siguiente operación de suma:
MSByte LSByte
25. Fundamentos del lenguaje ensamblador
259
00000010 11001001 713
+00001000 10100101 +2213
------------------------- --------
Como las microcomputadoras de 8 bits suelen utilizar operandos de 8 bits, la operación anterior debe
ejecutarse en dos fases: primero sumando el byte de más bajo orden, conservando el acarreo que debe
trascender a la operación de los bytes más significativos:
11001001
+10100101
--------------
CY=1 01101110
En el segundo paso, se suman los dos bytes de orden superior, sumando el acarreo precedente de la suma
anterior al bit menos significativo:
00000010
+00001000
+ 1 Acarreo precedente
--------------
00001011
Los dos resultados se combinan en la suma resultante de 16 bits:
MSByte LSByte
00001011 01101110 = 2926D
El proceso consiste, pues, en sumar dos bytes cada vez, conservar el acarreo y añadirlo al siguiente byte de
orden superior, volver a conservar el acarreo para un posible próximo paso y así sucesivamente, repitiendo
el proceso tantas veces como bytes tengan los operandos. En los microprocesadores existe la instrucción de
suma con acarreo (ADC), útil para esta aplicación.
Ejemplo 4.21:
NAME SUMA_MULTIPLE
;==========================================================
;PROPÓSITO DEL PROGRAMA: Sumar dos numeros multibytes
;almacenados en memoria.
;==========================================================
;PARAMETROS DE ENTRADA:
;
;R0-Apunta a la dirección mas significativa del primer sumando
;R1-Apunta a la dirección mas significativa del segundo sumando
;B-Contiene el numero de bytes de cada sumando
;==========================================================
;PARAMETROS DE SALIDA:
;
;El resultado de la operacion se devuelve en las mismas
;localizaciones del primer sumando
;==========================================================
;FORMA DE LLAMADO:CALL SUM_MULTIPLE
;==========================================================
;REGISTROS UTILIZADOS:A,R0,R1,B
26. Fundamentos del lenguaje ensamblador
260
;==========================================================
;BYTES QUE OCUPA EN MEMORIA: 21 Bytes.
;==========================================================
;EJEMPLO:
;
; Entrada:
;DIR_0=20H DIR_1=35H CONTADOR=04H y en memoria existe:
; (20H...23H)=(88H,88H,88H,88H)
; (35H...39H)=(22H,22H,22H,22H)
;
; Salida: (20H...23H)=(AAH,AAH,AAH.AAH)
;==========================================================
EXTRN NUMBER (DIR_0)
EXTRN NUMBER (DIR_1)
EXTRN NUMBER (CONTADOR)
PUBLIC SUM_MULTIPLE
SUMA_MULTIPLE SEGMENT CODE
RSEG SUMA_MULTIPLE
SUM_MULTIPLE:
mov R0,#DIR_0;
mov R1,#DIR_1;
mov B,#CONTADOR;
PROX_BYTE: mov A,@R1 ;SE OBTIENE SUMANDO
addc A,@R0 ; SE ADICIONA COSUMANDO CON ACARREO
mov @R0,A ;RESULTADO EN DIRECCION DE R0
inc R1
inc R0 ;PROXIMO DATO DE 8 BITS
djnz B,PROX_BYTE ;CONTROL DE NÚMERO DE BYTES DE OPERANDOS
jnc FIN
mov A,#01H ; SE GARANTIZA POSIBLE ULTIMO ACARREO
add A,@R0
mov @R0,A
FIN: ret
End
PROGRAMA DE COMPROBACIÓN:
NAME PROGRAMA_COMPROBACION
; Comprobación del algoritmo de suma múltiple
EXTRN CODE (SUM_MULTIPLE)
PUBLIC CONTADOR
PUBLIC DIR_0
PUBLIC DIR_1
CONTADOR EQU 04H;
DIR_0 EQU 20H;
DIR_1 EQU 35H;
DSEG AT DIR_0 ; DIRECCION DE SUMANDO Y DESTINO
DS CONTADOR ;
DSEG AT DIR_1 ; DIRECCIÓN DE COSUMANDO
DS CONTADOR ; NÚMERO DE BYTES DE OPERANDOS
27. Fundamentos del lenguaje ensamblador
261
INICIO SEGMENT CODE
RSEG INICIO
CALL SUM_MULTIPLE
END
La Sustracción.
La sustracción es semejante a la adición, pero en este caso el acarreo (que se setea en la sustracción como
indicación de préstamo) debe ser sustraído al byte siguiente de orden superior.
Ejemplo 4.22:
Realice la siguiente sustracción, considerando un formato básico de 8 bits:
MSByte LSByte
00010010 00011010 4634D
-00010000 10010010 -4242D
-------------------------- ---------
Como primer paso, se debe sustraer los bytes de más bajo orden, considerando el posible préstamo.
00011010
-10010010
--------------
B=1 10001000
Posteriormente, se realiza la sustracción del préstamo a la operación del byte de orden superior:
00010010
-00010000
- 1 Sustracción del préstamo precedente
-------------
00000001
El resultado sería:
MSByte LSByte
00000001 10001000 = 392D
Los préstamos deben ser sustraídos a las operaciones de sustracción de los bytes precedentes, semejante a la
adición. Los microprocesadores pueden sustraer con préstamo, operación útil para esta aplicación.
Ejemplo 4.23:
NAME SUSTRACCIÓN_MULTIPLE
;**********************************************************
; PROPÓSITO DEL PROGRAMA: La sustraccion de dos numeros
; multibytes almacenados en memoria.
;**********************************************************
; Parámetros de entrada:
; R0 - Apunta a la dirección más significativa del minuendo.
28. Fundamentos del lenguaje ensamblador
262
; R1 - Apunta a la dirección más significativa del sustraendo.
; R2 - Contiene el número de bytes de cada operando.
;**********************************************************
; Parametros de salida: El resultado de la operacion se
; devuelve en las mismas localizaciones del minuendo
; (primer operando).
;**********************************************************
; Registros utlilizados: A,R0,R1,B.
;**********************************************************
; Forma de llamado: Call RESTA_MULTI
;**********************************************************
; EJEMPLO:
; Entrada:
; Si R0--> 24h, R1-->34h y R2= 5h
; (20h....24h)=(88h,88h,88h,88h,88h)
; (30h....34h)=(22h,22h,22h,22h,22h)
; Salida:
; (20h....24h)=(66h,66h,66h,66h,66h)
; Si CY=1 después de la ejecución, resultado incorrecto.
;**********************************************************
PUBLIC RESTA_MULTI
EXTRN NUMBER (DIR_MINU)
EXTRN NUMBER (DIR_SUST)
EXTRN NUMBER (CANT_BYTES)
RES_MULTIPLE SEGMENT CODE
RSEG RES_MULTIPLE
RESTA_MULTI:
mov r0,#DIR_MINU;
mov r1,#DIR_SUST;
mov B,#CANT_BYTES;
clr C ;PREPARA ACARREO PARA LA PRIMERA SUSTRACCIÓN
PX_BYTE: Mov A,@R0 ;SE OBTIENE EL MINUENDO
subb A,@R1 ;SE SUSTRAE CON ACARREO EL SUSTRAENDO
mov @R0,A ;RESULTADO EN DIRECCION DE R0
dec R0 ;PROXIMO DATO DE 8 BITS
dec R1
djnz B,PX_BYTE ;CONTROL DE NÚMERO DE BYTES DE OPERANDOS
ret
end
PROGRAMA DE COMPROBACIÓN:
NAME PROGRAMA_COMPROBACION
; Comprobación del algoritmo de sustracción múltiple
DIR_MINU EQU 24h;
DIR_SUST EQU 34H;
CANT_BYTES EQU 05H;
EXTRN CODE (RESTA_MULTI)
PUBLIC DIR_MINU ;DIRECCION DE MINUENDO Y DESTINO
PUBLIC DIR_SUST ;DIRECCIÓN DE SUSTRAENDO
PUBLIC CANT_BYTES ;NÚMERO DE DATOS DE LOS OPERANDOS
29. Fundamentos del lenguaje ensamblador
263
CALL RESTA_MULTI
END
4.4.2.- La rotación.
En la fig. 4.5 se muestra como efectuar la rotación en ambos sentidos (derecha e izquierda) de un dato en
múltiple precisión.
En la rotación a la derecha se toma el byte más significativo y se rota a la derecha a través del acarreo (C)
(en el primer paso se colocará el valor de C en el bit más significativo), posteriormente C posee el valor que
existía en el bit menos significativo, el cual será introducido en el bit más significativo del próximo dato de
menor orden, el proceso se repite en dependencia del número de bytes. En C se devuelve el valor del bit
menos significativo del dato de menor orden (byte menos significativo o LSByte).
En la rotación a la izquierda se toma inicialmente el byte menos significativo y se rota a la izquierda a
través del acarreo (de acuerdo a ello el bit menos significativo tendrá el valor de C y el bit 7 será devuelto
en este último), para el próximo paso C será colocado en el bit menos significativo del próximo byte de
mayor orden, el proceso se repite de acuerdo al número de bytes hasta que C devuelve el valor del bit más
significativo del byte de mayor orden (MSByte).
La rotación de números multibytes puede ser útil en la conversión BCD-binario, multiplicación y división
en múltiple precisión o multiplicación y división por potencias de dos.
MSByte LSByte
(a) Rotación a la derecha.
MSByte LSByte
(b) Rotación a la izquierda.
Figura 4.5.- Rotación en múltiple precisión.
Ejemplo 4.24:
NAME ROTAR_DERECHA
;=============================================================================
;PROPÓSITO DEL PROGRAMA:Rotar un numero multibytes a la derecha
;=============================================================================
;PARAMETROS DE ENTRADA:
;
;B-Número de bytes del operando
.....
C
..... ..... .....
C
.....
C
..... ..... .....
C
30. Fundamentos del lenguaje ensamblador
264
;R0-Direccion menos significativa del número a rotar
;En el acarreo (CY)debe estar lo que se desea entrar en el bit 7 de la direccion
;menos significativa.
;=============================================================================
;FORMA DE LLAMADO:CALL ROTA_DERECHA
;=============================================================================
;REGISTROS UTILIZADOS:A,R0,B,C
;=============================================================================
;BYTES QUE OCUPA EN MEMORIA: 13
;=============================================================================
;EJEMPLO:
; Entrada:
; Si R0=20H B=03H CY=1 (20H...22H)=(77H,66H,22H)
; Salida:
; (20H...22H)=(BBH,B3H,11H)
;=============================================================================
PUBLIC ROTA_DERECHA
EXTRN NUMBER (DIR_BYTEALTO)
EXTRN NUMBER (CANT_BYTES)
ROTA_DER SEGMENT CODE
RSEG ROTA_DER
ROTA_DERECHA:
Mov B, #CANT_BYTES;
Mov R0, #DIR_BYTEALTO;
SETB C; CLR C SI C=0;
RotaDer:Mov A,@R0 ; Valor a rotar
RrC A ; Rota a la derecha el valor
Mov @R0,A ; Almacena valor rotado
Inc R0 ;
DjnZ B,RotaDer ; Control del número de bytes
Ret
End
PROGRAMA DE COMPROBACIÓN:
NAME PROGRAMA_COMPROBACION
; Comprobación del algoritmo de rotación a la derecha
EXTRN CODE (ROTA_DERECHA)
PUBLIC DIR_BYTEALTO
PUBLIC CANT_BYTES
DIR_BYTEALTO EQU 20h; DIRECCIÓN DEL BYTE MÁS SIGNIFICATIVO
CANT_BYTES EQU 03H; NÚMERO DE DATOS DEL OPERANDO
CALL ROTA_DERECHA
END
4.4.3.- Comparación de dos cadenas.
Cuando se comparan dos cadenas, la cadena 1 puede ser mayor, menor o igual que la cadena 2. Para ello, se
definen dos punteros que apunten al byte que define al dato más significativo de ambas cadenas, basta que
un dato más significativo de la cadena 1 sea mayor o menor que el dato equivalente de la cadena 2 para que
31. Fundamentos del lenguaje ensamblador
265
la cadena sea mayor o menor. En caso que los datos sean iguales, el proceso debe repetirse hasta que se
comparen los datos menos significativos, que determinarán la igualdad en ambas cadenas.
Ejemplo 4.25:
NAME COMPARACION_MULTIBYTES
;=============================================================================
;PROPÓSITO DEL PROGRAMA:Comparar dos números almacenados en memoria
;=============================================================================
;Los bytes menos significativos de los dos numeros a comparar estaran en las
;direcciones mas bajas
;=============================================================================
;PARAMETROS DE ENTRADA:
;
;B- Número de bytes a comparar
;R0-Octeto más significativo del número 1
;R1-Octeto más significativo del número 2
;=============================================================================
;PARAMETROS DE SALIDA:
;
;A-Resultado de la comparacion (bandera):
;A=00H si número_1>número_2
;A=01H si número_1<número_2
;A=02H si número_1=número_2
;=============================================================================
;FORMA DE LLAMADO:CALL COMPARA
;=============================================================================
;BYTES QUE OCUPA EN MEMORIA: 28
;=============================================================================
;REGISTROS UTILIZADOS:A,R0,R1,B, DIRECCIÓN_DATO 7FH
;=============================================================================
;EJEMPLO:
; Entrada:
; Si B=3 ,R0=20H, R1=30H y (20h...22h)=77H,88H,55H (30..32h)=77H,77H,77H
; Salida:
; A=00H
;=============================================================================
PUBLIC COMPARA
EXTRN NUMBER (DIR_N1)
EXTRN NUMBER (DIR_N2)
EXTRN NUMBER (CANT_BYTES)
COMP SEGMENT CODE
RSEG COMP
COMPARA:
mov r0, #DIR_N1
mov r1, #DIR_N2
mov B,#CANT_BYTES
COMPAR:
mov A,@R1 ; SE TOMA BYTE MÁS SIG. DE NUM. 2
mov 7FH,@R0 ;BYTE MAS SIGNIF. DE NUM. 1 A MEMORIA
cjne A,7FH,NOIGUAL ;SE COMPARA LOS DOS NÚMEROS
inc R0 ;DECREMENTO PUNTER0
inc R1
djnz B,COMPAR
mov A,#02H ;NUM. 1=NUM. 2
32. Fundamentos del lenguaje ensamblador
266
ret
NOIGUAL:jc MAYOR1
mov A,#01H ;NUM. 1<NUM. 2
ret
MAYOR1:mov A,#00H ;NUM. 1>NUM. 2
ret
END
PROGRAMA DE COMPROBACIÓN:
NAME PROGRAMA_COMPROBACION
; Comprobación del algoritmo de comparación de dos números multibytes.
DIR_N1 EQU 20h;
DIR_N2 EQU 30H;
CANT_BYTES EQU 03H;
EXTRN CODE (COMPARA)
PUBLIC DIR_N1 ; Dirección del octeto más significativo del num. 1
PUBLIC DIR_N2 ; Dirección del octeto más significativo del num. 2
PUBLIC CANT_BYTES ;Número de octetos de cada número
CALL COMPARA
END
4.4.4.- Incremento y decremento de un número binario.
Cuando se decrementa un número binario multibytes debe encuestarse cuando en el byte de menor orden
ocurre un underflow (paso de 00 a FFH), lo cual debe provocar un decremento en el byte de mayor orden
consecutivo. De forma similar, en el caso de incremento debe considerarse cuando ocurre un overflow (paso
de FFH a 00) en el byte de menor orden, ello debe provocar un incremento en el byte de mayor orden
consecutivo.
Ejemplo 4.26:
NAME INCREMENTO_HEXADECIMAL
;=============================================================================
;PROPÓSITO DEL PROGRAMA:Incrementar una unidad un numero de N bytes almacenado
;en memoria.
;=============================================================================
;PARAMETROS DE ENTRADA:
;
;B-Número de bytes del numero a incrementar
;R0-Apunta a la dirección más alta del numero hexadecimal
;=============================================================================
;PARAMETROS DE SALIDA:
;El resultado se da en las mismas localizaciones de memoria, debe considerarse
;el acarreo
;=============================================================================
;FORMA DE LLAMADO:CALL INC_HEX
;=============================================================================
;REGISTROS UTILIZADOS:R0,B
;=============================================================================
;BYTES QUE OCUPA EN MEMORIA: 17
33. Fundamentos del lenguaje ensamblador
267
;=============================================================================
;EJEMPLO:
; Entrada:
;Si R0=23h B=04h (20h...23h)=(22h,ffh,ffh,ffh)
; Salida:
; (20h...23h)=(23h,00h,00h,00h)
;=============================================================================
PUBLIC INC_HEX
EXTRN NUMBER (DIR_BYTEBAJO)
EXTRN NUMBER (CANT_BYTES)
INC_H SEGMENT CODE
RSEG INC_H
INC_HEX:
Mov B, #CANT_BYTES;
Mov R0, #DIR_BYTEBAJO;
CLR C
INCHEX: cjne @R0,#0ffh,termino; Se toma octeto
inc @R0 ; Se incrementa
dec R0
djnz B,INCHEX ; Control cant. de datos
ret
termino:
inc @r0;
ret
end
PROGRAMA DE COMPROBACIÓN:
NAME PROGRAMA_COMPROBACION
; Comprobación del algoritmo de incremento de número multibytes.
EXTRN CODE (INC_HEX)
PUBLIC DIR_BYTEBAJO
PUBLIC CANT_BYTES
DIR_BYTEBAJO EQU 23h ;Dirección del byte menos significativo
CANT_BYTES EQU 04H ;Cantidad de bytes del dato
CALL INC_HEX
END
Ejemplo 4.27:
NAME DECREMENTO_HEXADECIMAL
;=============================================================================
;PROPÓSITO DEL PROGRAMA:Decrementar una unidad un numero de N bytes almacenado
;en memoria.
;=============================================================================
;PARAMETROS DE ENTRADA:
;
;B-Número de bytes del número a decrementar
;R0-Apunta a la dirección más alta del número hexadecimal
;=============================================================================
;PARAMETROS DE SALIDA:
34. Fundamentos del lenguaje ensamblador
268
;El resultado se da en las mismas localizaciones de memoria, debe considerarse
;el acarreo
;=============================================================================
;FORMA DE LLAMADO:CALL DEC_HEX
;=============================================================================
;REGISTROS UTILIZADOS:R0,B
;=============================================================================
;BYTES QUE OCUPA EN MEMORIA: 15
;=============================================================================
;EJEMPLO:
; Entrada:
;Si R0=94h B=04h (91h...94h)=(23h,00h,00h,00h)
; Salida:
; (91h...94h)=(22h,ffh,ffh,ffh)
;=============================================================================
PUBLIC DEC_HEX
EXTRN NUMBER (DIR_BYTEBAJO)
EXTRN NUMBER (CANT_BYTES)
INC_H SEGMENT CODE
RSEG INC_H
DEC_HEX:
Mov B, #CANT_BYTES;
Mov R0, #DIR_BYTEBAJO;
INCHEX: cjne @r0,#00h,termino
dec @r0; ; Se decrementa valor
dec R0
djnz B,INCHEX ;Control de cantidad de datos
ret
termino:
dec @r0;
ret
end
PROGRAMA DE COMPROBACIÓN:
NAME PROGRAMA_COMPROBACION
; Comprobación del algoritmo de decremento de número multibytes.
EXTRN CODE (DEC_HEX)
PUBLIC DIR_BYTEBAJO
PUBLIC CANT_BYTES
DIR_BYTEBAJO EQU 23h; Dirección del byte menos significativo
CANT_BYTES EQU 04H; Cantidad de bytes del dato
CALL DEC_HEX
END
4.4.5.- Incremento y decremento de un número en BCD.
Para decrementar un número en BCD debe considerarse que un decremento de 00 en el byte de menor orden
debe provocar el paso a 99 del mismo y debe sustraerse uno al próximo byte de mayor orden. En caso de
35. Fundamentos del lenguaje ensamblador
269
que la cuarteta (nibble) menos significativa al que es necesario sustraer uno valga cero, este debe pasar a 9 y
realizarse un decremento a la cuarteta más significativa (sustraer 10H al byte).
Cuando se realiza el incremento de un número en BCD debe encuestarse el paso de 99H a 00, lo cual debe
provocar un incremento en el byte de mayor orden consecutivo. Cuando la cuarteta menos significativa a
incrementar valga 9, esta debe pasar a cero con el correspondiente incremento en la cuarteta más
significativa (sumar 10H al byte). El algoritmo puede optimizarse utilizando la instrucción DAA, la cual es
aplicable (si el microprocesador lo posee) generalmente para la adición.
Ejemplo 4.28:
NAME INCREMENTO_BCD
;=============================================================================
;PROPÓSITO DEL PROGRAMA:Incrementar en uno un numero de N bytes almacenado en
;memoria, manteniendo formato BCD.
;=============================================================================
;PARAMETROS DE ENTRADA:
;
;B-Número de bytes del numero a incrementar
;R0-Puntero a la dirección más alta del numero BCD
;=============================================================================
;PARAMETROS DE SALIDA:
;
;En las mismas localizaciones donde está definido el número
;=============================================================================
;FORMA DE LLAMADO:CALL INC_BCD
;=============================================================================
;REGISTROS UTILIZADOS:A,R0,B
;=============================================================================
;BYTES QUE OCUPA EN MEMORIA:17
;=============================================================================
;EJEMPLO:
; Entrada:
; Si R0=23h B=04h (20...23h)=(22h,99h,99h,99h)
; salida:
; (20...23h)=(23h,00h,00h,00h)
;=============================================================================
PUBLIC INC_BCD
EXTRN NUMBER (DIR_BYTEBAJO)
EXTRN NUMBER (CANT_BYTES)
INC_B SEGMENT CODE
RSEG INC_B
INC_BCD:
mov R0,#DIR_BYTEBAJO
mov B,#CANT_BYTES
INCBCD:mov A,@R0 ; toma dato
add A,#01H ; lo incrementa
da a ; ajusta manteniendo el BCD
mov @r0,a
jnc termino
dec R0
djnz B,INCBCD ; control del número de bytes
termino: ret
end
36. Fundamentos del lenguaje ensamblador
270
PROGRAMA DE COMPROBACIÓN:
NAME PROGRAMA_COMPROBACION
; Comprobación del algoritmo de incremeto de número BCD.
EXTRN CODE (INC_BCD)
PUBLIC DIR_BYTEBAJO
PUBLIC CANT_BYTES
DIR_BYTEBAJO EQU 23h ; Dirección del byte menos significativo
CANT_BYTES EQU 04H ; Cantidad de bytes del dato
CALL INC_BCD
END
Ejemplo 4.29:
NAME DECREMENTO_BCD
;=============================================================================
;PROPÓSITO DEL PROGRAMA:Decrementar en uno un numero de N bytes almacenado en
;memoria, manteniendo formato BCD.
;=============================================================================
;PARAMETROS DE ENTRADA:
;B-Número de bytes del numero a decrementar
;R0-Apunta a la dirección más significativa del numero BCD
;=============================================================================
;PARAMETROS DE SALIDA:
;
;En las mismas localizaciones donde el número se ha definido
;=============================================================================
;FORMA DE LLAMADO:CALL DEC_BCD
;=============================================================================
;REGISTROS UTILIZADOS:A,R0,B
;=============================================================================
;BYTES QUE OCUPA EN MEMORIA:33
;=============================================================================
;EJEMPLO:
; Entrada:
;Si R0=23h B=04h (20...23h)=(23h,00h,00h,00h)
; Salida:
; devuelve: (20...23h)=(22h,99h,99h,99h)
;=============================================================================
PUBLIC DEC_BCD
EXTRN NUMBER (DIR_BYTEBAJO)
EXTRN NUMBER (CANT_BYTES)
DEC_B SEGMENT CODE
RSEG DEC_B
DEC_BCD:
Mov B, #CANT_BYTES;
Mov R0, #DIR_BYTEBAJO;
DECBCD: mov a,@r0;
cjne a,#00h,dec_normal
anl a,#0F0h ; cuarteta más significativa
37. Fundamentos del lenguaje ensamblador
271
cjne a,#00h, dec_men
mov @r0,#99h ; si cero, 99
dec R0
djnz B,DECBCD ;se decrementa contador
ljmp termino
dec_normal:
dec @r0;
ljmp termino
dec_men: clr c
subb a,10h ; decrementa cuarteta más sign.
orl a,#09H;
mov @r0,a
termino:
ret
end
PROGRAMA DE COMPROBACIÓN:
NAME PROGRAMA_COMPROBACION
; Comprobación del algoritmo de decremeto de número BCD.
EXTRN CODE (DEC_BCD)
PUBLIC DIR_BYTEBAJO
PUBLIC CANT_BYTES
DIR_BYTEBAJO EQU 23h; Dirección del byte menos significativo
CANT_BYTES EQU 04H; Cantidad de bytes del dato
CALL DEC_BCD
END
4.4.6.- El redondeo binario.
Cuando se almacena un valor multibyte, el redondeo no es más que encuestar si el byte que será truncado es
80H o superior, cuando ello ocurre se incrementa en uno el byte adyacente de orden superior, colocando a
cero los bytes menos significativos restantes.
Ejemplo 4.30:
;TITULO: REDONDEO DE UN NUMERO BINARIO
;=============================================================================
;PROPOSITO DEL PROGRAMA: Redondear un binario de N bytes almacenado a partir
; de una localización de memoria dada.
;=============================================================================
;PARAMETROS DE ENTRADA:
;
; R0-Apunta a la dirección menos significativa del numero a redondear
; B-Contiene el número de bytes del numero a redondear
;=============================================================================
;PARAMETRO DE SALIDA:
;
; El resultado se devuelve en las mismas localizaciones donde se ha definido el numero.
;=============================================================================
;FORMA DE LLAMADO: CALL RED_BIN
;=============================================================================
38. Fundamentos del lenguaje ensamblador
272
;REGISTROS UTILIZADOS: A,R0,B
;=============================================================================
;BYTES QUE OCUPA EN MEMORIA:
;=============================================================================
;EJEMPLO:
; Entrada:
; Si R0=20H B=04H (20H...23H)=(23H,80H,00H,00H)
; Salida:
; (20H...23H)=(24H,00H,00H,00H)
;=============================================================================
PUBLIC RED_BIN
EXTRN NUMBER (DIR_BYTEALTO)
EXTRN NUMBER (CANT_BYTES)
RED_B SEGMENT CODE
RSEG RED_B
RED_BIN:
Mov B, #CANT_BYTES;
Mov R0, #DIR_BYTEALTO;
inc R0 ;R0 AL BYTE MAS SIGNIF. -1
mov A,@R0 ; SE TOMA DATO
cjne A,#80H,NOIGUAL ;? SI @R0>=80H
NOIGUAL:jc REDBIN1 ;APROXIMA AL MENOR
dec R0 ;APROXIMA AL MAYOR
inc @R0 ;INCREMENTA EL BYTE MAS SIGNIF.
inc R0
REDBIN1:dec B
mov A,#00H ;COLOCA CERO
REDBIN2:mov @R0,A ;RESETEO BYTES MENOS SIGNIF.
inc R0
djnz B,REDBIN2 ;DECREMENTA CONTADOR DE BYTES
ret
end
PROGRAMA DE COMPROBACIÓN:
NAME PROGRAMA_COMPROBACION
; Comprobación del algoritmo de redondeo binario.
EXTRN CODE (RED_BIN)
PUBLIC DIR_BYTEALTO
PUBLIC CANT_BYTES
DIR_BYTEALTO EQU 20h; Dirección del byte más significativo
CANT_BYTES EQU 04H; Cantidad de bytes del dato
CALL RED_BIN
END
4.4.7.- El redondeo en BCD.
Redondear en BCD es incrementar el byte de mayor orden cuando el byte que se va a truncar es 50H ( la
mitad de 10D) o superior.
39. Fundamentos del lenguaje ensamblador
273
Ejemplo 4.31:
NAME REDONDEO_BCD
;=============================================================================
;PROPOSITO DEL PROGRAMA:Redondear un BCD de N bytes almacenado a partir de
;una direccion de memoria
;=============================================================================
;PARAMETROS DE ENTRADA:
;
;B-Contiene el numero de bytes del numero a redondear
;R0-Dirección menos significativa del numero a redondear
;=============================================================================
;PARAMETROS DE SALIDA:
;
;Se devuelve en las mismas localizaciones.
;=============================================================================
;FORMA DE LLAMADO:CALL RED_BCD
;=============================================================================
;REGISTROS UTILIZADOS:A,R0,B
;=============================================================================
;BYTES QUE OCUPA EN MEMORIA: 28
;=============================================================================
;EJEMPLO:
; Entrada:
; Si R0=20H B=04H (20H...23H)=(66H,60H,00H,00H)
; Salida:
; (20H...23H)=(67H,00H,00H,00H)
;=============================================================================
PUBLIC RED_BCD
EXTRN NUMBER (DIR_BYTEALTO)
EXTRN NUMBER (CANT_BYTES)
RED_BC SEGMENT CODE
RSEG RED_BC
RED_BCD:
Mov B, #CANT_BYTES;
Mov R0, #DIR_BYTEALTO;
inc R0 ; Adjunto a byte + sig.
mov A,@R0
cjne A,#50H,NOIGUAL ; ¿mayor a 50h?
NOIGUAL:jc REDBCD1 ;aproximo al menor
dec R0 ;aproximo al mayor
mov A,@R0 ;en a el mas significativo
add a,#01H
da A
mov @R0,A ;en memoria el resultado del redondeo
inc R0
REDBCD1:dec B
mov A,#00H ;colocar a cero bytes restantes
REDBCD2:mov @R0,A ;colocar a cero bytes menos significativos
inc R0
djnz B,REDBCD2 ;Control número de bytes
ret
end
40. Fundamentos del lenguaje ensamblador
274
PROGRAMA DE COMPROBACIÓN:
NAME PROGRAMA_COMPROBACION
; Comprobación del algoritmo de redondeo en BCD.
EXTRN CODE (RED_BCD)
PUBLIC DIR_BYTEALTO
PUBLIC CANT_BYTES
DIR_BYTEALTO EQU 20h; Dirección del byte más significativo
CANT_BYTES EQU 04H; Cantidad de bytes del dato
CALL RED_BCD
END
4.4.8.- El complemento a dos de números multibytes.
En las aplicaciones donde haya que negar un número (o lo que es lo mismo, obtener el complemento a dos)
es necesario adicionar el acarreo generado por los bytes de orden inferior a los bytes de orden superior. Para
ello, se obtiene el complemento a dos del byte menos significativo y el posible acarreo generado debe
adicionarse al complemento a uno de los bytes de mayor orden.
Ejemplo 4.32:
Determine el número negativo de:
MSByte LSByte
00001001 00000000 2304D
Solución:
En primer lugar se obtiene el complemento a dos del byte de menor orden:
Complemento a dos = 11111111 + 1= 00000000 (C=1)
Posteriormente se suma el acarreo al complemento a uno del byte de mayor orden:
11110110
+ 1
-------------
11110111
El resultado sería:
11110111 00000000
Ejemplo 4.33:
NAME COMPLEMENTO_A_2
;=============================================================================
;PROPÓSITO DEL PROGRAMA:Complemento a dos de un número multibytes.
;=============================================================================
41. Fundamentos del lenguaje ensamblador
275
;PARAMETROS DE ENTRADA
;
; B-Número de bytes
; R0-Direccion más significativa donde está el dato
;=============================================================================
;PARAMETROS DE SALIDA
;
;El resultado se devuelve en las localizaciones donde el dato está almacenado y
;Cy=1 si esta fuera de rango.
;=============================================================================
;FORMA DE LLAMADO:CALL COMPLEMENTO
;=============================================================================
;REGISTROS UTILIZADOS:A,R0,B
;=============================================================================
;BYTES QUE OCUPA EN MEMORIA: 22
;=============================================================================
;EJEMPLO:
; Entrada:
;Si R0=20H y en memoria 20H=FFH 21H=00H con CY=1 y B=2
; Salida: 20H=01H 21H=00H
;=============================================================================
PUBLIC COMPLEMENTO
EXTRN NUMBER (DIR_BYTEBAJO)
EXTRN NUMBER (CANT_BYTES)
COMP_2 SEGMENT CODE
RSEG COMP_2
COMPLEMENTO:
MOV B,#CANT_BYTES
MOV R0,#DIR_BYTEBAJO
MOV A,@R0 ;BYTE A COMPLEMENTAR EN A
CPL A ;COMPLEM. A 2 EL PRIMER BYTE
ADD A,#01H
MOV @R0,A ;SALVO EL RESULTADO EN MISMA DIRECCIÓN
DEC B
REPCOP:DEC R0 ;PROXIMO BYTE
MOV A,@R0
CPL A
ADDC A,#00H ;ADICIONO EL ACARREO
MOV @R0,A ;SALVO EL RESULTADO
DJNZ B,REPCOP ;CONTADOR DE BYTES
RET
END
PROGRAMA DE COMPROBACIÓN:
NAME PROGRAMA_COMPROBACION
; Comprobación del algoritmo de complemento a dos multibytes
EXTRN CODE (COMPLEMENTO)
PUBLIC DIR_BYTEBAJO
PUBLIC CANT_BYTES
DIR_BYTEBAJO EQU 21h ; Dirección del byte menos significativo
CANT_BYTES EQU 02H ; Cantidad de bytes del dato
42. Fundamentos del lenguaje ensamblador
276
CALL COMPLEMENTO
END
4.4.9.- Mover o copiar de una zona de memoria a otra.
A menudo es necesario transferir bloques de información, para ello se ejecutan las funciones de mover o
copiar.
Cuando se mueve un bloque de datos, la cadena fuente es transferida a un destino (cadena destino) que se
sitúa a partir de una nueva dirección en memoria. La cadena fuente se sustituye por ceros. Cuando se copia,
se transfiere la cadena origen al destino y ambas zonas de memoria poseerán el mismo contenido.
Ejemplo 4.34:
NAME MUEVE_O_COPIA
;=============================================================================
;PROPÓSITO DEL PROGRAMA:Mover o copiar el contenido de una zona de memoria
;de datos a otra.
;=============================================================================
;PARAMETROS DE ENTRADA:
;
;A-Bandera que indica mover o copiar
;A=00H-Mover
;A=01H-Copiar
;R0-Direccion fuente más significativa
;R1-Direccion destino más significativa
;B-Número de bytes de la cadena
;=============================================================================
;FORMA DE LLAMADO:CALL MOV_O_COP
;=============================================================================
;REGISTROS UTILIZADOS:A,R0,R1,B
;=============================================================================
;BYTES QUE OCUPA EN MEMORIA: 29
;=============================================================================
;EJEMPLO:
; Entrada:
; Si R0=24H , R1=34H y B=5 20...24(FF,FF,FF,FF,FF)
; Salida:
; 30...34(FF,FF,FF,FF,FF)
; siendo 20..24(00,00,00,00,00) si mueve
; o 20..24(FF,FF,FF,FF,FF) si copia
;=============================================================================
PUBLIC MOV_O_COP
EXTRN NUMBER (DIR_BYTEALTO_ORIGEN)
EXTRN NUMBER (CANT_BYTES)
EXTRN NUMBER (BANDERA)
EXTRN NUMBER (DIR_BYTEALTO_DESTINO)
MOV_C SEGMENT CODE
RSEG MOV_C
MOV_O_COP:
Mov B, #CANT_BYTES;
Mov R0, #DIR_BYTEALTO_ORIGEN;
43. Fundamentos del lenguaje ensamblador
277
Mov R1, #DIR_BYTEALTO_DESTINO;
Mov A, #BANDERA
cjne A,#01H,MOVER ; mover?
COPIAR:mov A,@R0 ; toma dato
mov @R1,A ; y lo transfiere
dec R0 ; DECREMENTO PUNTEROS
dec R1
djnz B,COPIAR ;contador
ret
MOVER:mov A,@R0 ; dirección fuente
mov @R0,#00H ; se coloca a cero
mov @R1,A
dec R0 ;DECREMENTO PUNTEROS
dec R1
djnz B,MOVER ;contador
ret
END
PROGRAMA DE COMPROBACIÓN:
NAME PROGRAMA_COMPROBACION
; Comprobación del algoritmo para mover o copiar datos
EXTRN CODE (MOV_O_COP)
PUBLIC DIR_BYTEALTO_ORIGEN
PUBLIC CANT_BYTES
PUBLIC BANDERA
PUBLIC DIR_BYTEALTO_DESTINO
DIR_BYTEALTO_ORIGEN EQU 34h; Dirección más significativa del origen
DIR_BYTEALTO_DESTINO EQU 24H; Dirección más significativa del destino
CANT_BYTES EQU 05H; Cantidad de bytes a transferir
BANDERA EQU 01H; Indica si mueve o copia
CALL MOV_O_COP
END
4.4.10.- El tratamiento de tablas.
Una tabla consiste en un grupo de datos que ocupan posiciones contiguas. Ya sea mediante desplazamientos
aplicados a la tabla o recurriendo a otros datos asociados con la entrada de la tabla, ésta sirve para
correlacionar entre sí bloques de datos. Cada tabla está formada por un número variable de entradas
multiplicado por la longitud de cada una de ellas.
Sometiendo la dirección inicial de una tabla a desplazamientos, se pueden inspeccionar los elementos que la
componen. Como ejemplo puede considerarse una rutina de conversión de BCD a siete segmentos, en la
cual el valor en BCD se suma a un puntero que indica el inicio de la tabla, extrayéndose el código BCD
equivalente de la entrada correspondiente (ver secc. 4.2.8).
Otro ejemplo de tabla puede ser aquella en que el elemento o dato contenido en ella define el
desplazamiento que se aplica a otras operaciones, como por ejemplo, en un sistema de clasificación de cual
rutina debe ser ejecutada. Para atender una entrada por teclado pueden utilizarse dos tablas. La primera tabla
estaría formada por todas las señales de mando o control; si hubiera 10 comandos de 1 byte, la tabla tendría
44. Fundamentos del lenguaje ensamblador
278
10 bytes de largo, y cada entrada de 1 byte sería el caracter asociado a la señal de mando en cuestión. La
segunda tabla estaría formada por 10 entradas de 2 bytes, cada una de las cuales definen la dirección
correspondiente a la rutina que debe ejecutarse en respuesta al comando de control.
Como ejemplo, supóngase que se atiende un teclado que exporte caracteres ASCII, donde si "A","B" o "C"
son presionados se necesite ejecutar determinada función.
La primera tabla puede estar formada por:
TABLA_ENT:
db “A”,”B”,”C”
Si la tecla B es presionada, entonces un apuntador indicaría que B ha sido hallada en la tabla (A=00, B=01,
etc). En la segunda tabla estaría definido:
TABLA_DIR:
dw DIR_Ah, DIR_Bh, DIR_Ch
El apuntador debe ser multiplicado por dos ( una dirección de 16 bits ocupa dos bytes) y realizarse un
acceso a la dirección de respuesta (DIR_B) después de hacer un desplazamiento a partir de la dirección de
inicio de la segunda tabla.
Existen tablas donde los valores que la conforman no poseen un orden preestablecido( tabla de entradas
desordenadas), donde se hace necesario buscar si determinado dato existe, para lo que se recurre a un
escrutinio secuencial, inspeccionándose la tabla de principio a fin para comparar el contenido con la clave
buscada. El número medio de entradas que se procesa en tal búsqueda secuencial es el número total de
entradas de la tabla entre dos.
Si la tabla posee entradas ordenadas, el escrutinio binario puede usarse en la búsqueda de un dato. En este
tipo de escrutinio la zona a inspeccionar se divide en dos partes para cada comparación. La porción que se
inspeccionará en la siguiente comparación depende de la entrada que se tenga y la clave. Como ejemplo,
supóngase que la clave es BACH en la siguiente tabla:
Dirección de Entrada Valor No. de comparación
0 BACH Cuarta
1 BIZET Tercera
2 DVORAK Segunda
3 FRANK
4 LISZT Primera
5 RAVEL
6 ROSSINI
7 STRAUSS
8 VERDI
La primera comparación se hace en la mitad de la tabla, como la letra de la clave posee un valor inferior a la
L de LISZT se iría en la próxima comparación a la mitad inferior, si no fuese así se iría a la mitad superior.
Al efectuar cada comparación, la zona a examinar se reduce a la mitad. Cada nueva comparación tiene lugar
hacia el centro de la zona restante.
El número de comparaciones que habría que hacer en el peor caso sería:
45. Fundamentos del lenguaje ensamblador
279
1)(log2 rentradasdetotalNúmeroN
donde r significa redondeadas, en el ejemplo anterior, log2(9)=4, ya que log2(9)=4.xx.
Otra modalidad de estructura de datos es la matriz. Una tabla no es más que una matriz de una sola
dimensión cuando se hace referencia a la entrada de la misma mediante desplazamientos a partir del
comienzo, o en el índice. Los datos se pueden colocar en matrices bidimensionales o incluso de n
dimensiones. Una matriz de dos dimensiones está caracterizada por un número de fila (m) y un número de
columna (n), el número total de elementos es mn; la matriz se puede colocar en memoria en este orden:
C0,R0; C0,R1; C0,R2;...;C0,Rm-1; C1,R0,..etc; o en este otro modo: R0,C0; R0,C1; R0,C2; ...;R0, Cn-1;
R1,C0;..etc. En el primer caso, el desplazamiento medido a partir de la zona ocupada por los elementos
integrantes de la matriz viene dado por (Cm)+R, donde C es el número de la columna (empezando por
cero), m es el número total de filas y R es el número de la fila (comenzando por cero). En el segundo caso el
desplazamiento responde a la fórmula (Rn)+C, donde n es el número de columnas.
Ejemplo 4.35:
Establezca la siguiente matriz en memoria:
Número de columnas
Número de filas
0 1 2
0 0 3 5
1 2 8 9
2 4 3 1
Utilizando el primer método, sería:
db 0,2,4,3,8,3,5,9,1
Para acceder al dato correspondiente a la fila 1, columna 2 se aplica:
(Cm)+R = 2(3)+1 = 7
Como puede apreciarse, el séptimo valor (contando a partir de cero) es el 9.
4.4.10.1.-Entrar un dato en una tabla.
Un valor puede colocarse en una tabla en el byte más o menos significativo, lo cual debe seleccionarse en
el algoritmo a través de un indicador o bandera. Si se coloca el valor en el byte menos significativo el byte
más significativo se perderá y viceversa. El método previamente descrito puede optimizarse si se dispone de
dos punteros, los cuales se incrementarán al entrar un valor en el byte de menor orden o se decrementarán
al entrar el valor en el byte de mayor orden.
Estas rutinas pueden ser útiles para colocar un dato en memoria para un visualizador a 7 segmentos o
incrementar un buffer de entrada por teclado.
Ejemplo 4.36:
NAME ENTRADA_DATO_A_CADENA
;=============================================================================
46. Fundamentos del lenguaje ensamblador
280
;PROPÓSITO DEL PROGRAMA:Entrar un dato a una cadena de N bytes,la entrada
;pude ser tanto por la derecha como por la izquierda.
;=============================================================================
;PARAMETROS DE ENTRADA:
;
;B-Número de bytes de la cadena
;R0-Direccion mas significativa de la cadena
;R3-Bandera que indica entrada por derecha o izquierda
; R3=0; entra por la derecha (byte menos significativo)
; R3=1; entra por la izquierda (byte mas significativo)
;R2-Dato a entrar
;=============================================================================
;FORMA DE LLAMADO:CALL ENT_DATO
;=============================================================================
;REGISTROS UTILIZADOS:B,R0,R2,R3,A
;=============================================================================
;BYTES QUE OCUPA EN MEMORIA: 40
;=============================================================================
;EJEMPLO:
; Entrada:
; Si R0=22H B=03H R3=0H R2=45H
; (20H....22H)=(11H,22H,33H)
; Salida:
; (20H....22H)=(22H,33H,45H)
;=============================================================================
PUBLIC ENT_DATO
EXTRN NUMBER (DIR_BYTEALTO)
EXTRN NUMBER (CANT_BYTES)
EXTRN NUMBER (BANDERA)
EXTRN NUMBER (DATO)
ENT_C SEGMENT CODE
RSEG ENT_C
ENT_DATO:
Mov B, #CANT_BYTES;
Mov R0, #DIR_BYTEALTO;
Mov R3, #BANDERA
Mov R2, #DATO
dec B
cjne R3,#01H,ENTDER
ENTIZQD:dec R0 ;R0 APUNTA A UNA DIREC. MAS BAJA
mov A,@R0
inc R0 ;SUBO EL VALOR ANTERIOR
mov @R0,A ;A UNA DIREC. SUPERIOR
dec R0 ;DECREMENTO R0 A LA PROXIMA DIREC.
djnz B,ENTIZQD
mov A,R2
mov @R0,A ;ENTRO DATO A LA CADENA
ret
ENTDER:clr C ; SETEO EL ACARREO PARA LA RESTA
mov A,R0 ;GARANTIZA QUE R0 APUNTE A DIR. MAS BAJA
subb A,B
mov R0,A
ENTDER1:inc R0 ;R0 APUNTA A DIREC. MAS ALTA
mov A,@R0
47. Fundamentos del lenguaje ensamblador
281
dec R0 ;SUBO EL VALOR ANT. A DIREC. INFERIOR
mov @R0,A
inc R0 ;INC R0 A UNA DIRECCION MAS ALTA
djnz B,ENTDER1
mov A,R2
mov @R0,A ;ENTRO EL DATO A LA CADENA
RET
END
PROGRAMA DE COMPROBACIÓN:
NAME PROGRAMA_COMPROBACION
; Comprobación del algoritmo para entrar dato por derecha
; o izquierda
EXTRN CODE (ENT_DATO)
PUBLIC DIR_BYTEALTO
PUBLIC CANT_BYTES
PUBLIC BANDERA
PUBLIC DATO
DIR_BYTEALTO EQU 22h; Dirección apunta a dato más significativo
CANT_BYTES EQU 03H; cantidad de datos
BANDERA EQU 00H; Sentido de entrada
DATO EQU 45h; dato a entrar
CALL ENT_DATO
END
4.4.10.2.- El máximo y el mínimo de una tabla.
Para determinar el máximo de una tabla puede inicializarse una variable con el menor valor que puede
tomar un byte (00), tal valor debe compararse con cada uno de los elementos de forma tal que la variable
acumule el mayor valor (FFh). De forma idéntica se puede obtener el mínimo, pero ahora la variable debe
inicializarse con el mayor valor. Un método alternativo puede ser realizar la búsqueda por el método de la
burbuja.
Ejemplo 4.37:
NAME MAXIMO_DE_TABLA
;=============================================================================
;PROPÓSITO DEL PROGRAMA:Buscar el maximo valor de una tabla de N bytes
;=============================================================================
;PARAMETROS DE ENTRADA:
;
;R0-Apunta a la direccion inicial de la tabla
;B-Contiene la cantidad de elementos de la tabla
;=============================================================================
;FORMA DE LLAMADO:CALL MAXIMO
;=============================================================================
;REGISTROS UTILIZADOS:A,R0,DIR_DATO:30H,B
;=============================================================================
;BYTES QUE OCUPA EN MEMORIA: 20
;=============================================================================
48. Fundamentos del lenguaje ensamblador
282
;EJEMPLO:
; Entrada:
; Si R0=20H B=3 (20..22H)=(22H,44H,77H)
; Salida:
; 30H=77H
;=============================================================================
PUBLIC MAXIMO
EXTRN NUMBER (DIR_BYTEBAJO)
EXTRN NUMBER (CANT_BYTES)
MAX_C SEGMENT CODE
RSEG MAX_C
MAXIMO:
Mov B, #CANT_BYTES;
Mov R0, #DIR_BYTEBAJO;
mov A,@R0 ;Toma dato
mov 30H,A ;a memoria
MAX:mov A,@R0 ;próximo dato
cjne A, 30H, NOIGUAL ;se compara
NOIGUAL:jc NOMAX
mov 30H,A ;EN 30H EL NUEVO MAXIMO
NOMAX:inc R0
djnz B,MAX
ret
END
PROGRAMA DE COMPROBACIÓN:
NAME PROGRAMA_COMPROBACION
; Comprobación del algoritmo para búsqueda del máximo
EXTRN CODE (MAXIMO)
PUBLIC DIR_BYTEBAJO
PUBLIC CANT_BYTES
DIR_BYTEBAJO EQU 20h; Dirección menos significativa de la tabla
CANT_BYTES EQU 03H; Número de datos de la tabla
CALL MAXIMO
END
Ejemplo 4.38:
NAME MINIMO_TABLA
;=============================================================================
;PROPÓSITO DEL PROGRAMA:Buscar el minimo valor de una tabla de N bytes
;=============================================================================
;PARAMETROS DE ENTRADA:
;
;R0-Apunta a la direccion inicial de la tabla
;B-Contiene la cantidad de elementos de la tabla
;=============================================================================
;FORMA DE LLAMADO:CALL MINIMO
;=============================================================================
49. Fundamentos del lenguaje ensamblador
283
;REGISTROS UTILIZADOS:A,R0,DIR_DATO:30H,B
;=============================================================================
;BYTES QUE OCUPA EN MEMORIA: 20
;=============================================================================
;EJEMPLO:
; Entrada:
; Si R0=20H B=3 (20..22H)=(22H,44H,77H)
; Salida:
; 30H=22H
;=============================================================================
PUBLIC MINIMO
EXTRN NUMBER (DIR_BYTEBAJO)
EXTRN NUMBER (CANT_BYTES)
MIN_C SEGMENT CODE
RSEG MIN_C
MINIMO:
Mov B, #CANT_BYTES;
Mov R0, #DIR_BYTEBAJO;
mov A,@R0 ;toma dato
mov 30H,A ;primer dato a memoria
MIN:mov A,@R0
cjne A,30H,NOIGUAL
NOIGUAL:jnc NOMIN
mov 30H,A ;en 30H el mínimo
NOMIN:inc R0
djnz B,MIN
ret
END
PROGRAMA DE COMPROBACIÓN:
NAME PROGRAMA_COMPROBACION
; Comprobación del algoritmo para búsqueda del mínimo
EXTRN CODE (MINIMO)
PUBLIC DIR_BYTEBAJO
PUBLIC CANT_BYTES
DIR_BYTEBAJO EQU 20h; Dirección menos significativa de la tabla
CANT_BYTES EQU 03H; Número de datos de la tabla
CALL MINIMO
END
La clasificación por burbujas: Existe una estructura donde un conjunto de elementos está desordenado en
una tabla y puede que sea necesario que estos elementos adopten un orden progresivo. Una técnica de cla-
sificación es la denominada clasificación por burbujas.
En la clasificación por burbujas cada elemento del dato se compara con el precedente y se intercambia con
él si su valor es inferior. Así, el dato de menor valor va "emergiendo" hacia la parte superior de la tabla. La
clasificación se ha completado cuando no tienen lugar más intercambios.
50. Fundamentos del lenguaje ensamblador
284
Ejemplo 4.39:
Ordene en orden ascendente la siguiente tabla:
1
17
101
2
5
45
37
16
3
Para solucionar este problema, se deben ejecutar seis pasos, aparte del final, donde se determina que no
hacen falta más intercambios para tener clasificada la tabla.
Los pasos a desarrollar para clasificar por burbujas son:
Origen Después del Después del Después del
paso 1 paso 2 paso 3
1 1 1 1
17 17* 2 2
101* 2* 5 5
2* 5* 17 17*
5* 45* 37* 16*
45* 37* 16* 3*
37* 16* 3* 37
16* 3* 45 45
3* 101 101 101
Después del Después del Después del
paso 4 paso 5 paso 6
1 1 1
2 2 2
5 5* 3
16* 3* 5
3* 16 16
17 17 17
37 37 37
45 45 45
101 101 101
* - Significa que los valores se intercambian.
Nótese como es conveniente establecer dos punteros para comparar los datos de la lista.
Ejemplo 4.40:
51. Fundamentos del lenguaje ensamblador
285
NAME BURBUJA
;=============================================================================
;PROPÓSITO DEL PROGRAMA:Ordenar una tabla de N bytes
;=============================================================================
;PARAMETROS DE ENTRADA:
;
;R0-Apunta a la direccion inicial de la tabla
;B-Contiene la cantidad de elementos de la tabla
;=============================================================================
;FORMA DE LLAMADO:CALL BURBUJA
;=============================================================================
;REGISTROS UTILIZADOS:A,R0,B
;=============================================================================
;BYTES QUE OCUPA EN MEMORIA: 26
;=============================================================================
;EJEMPLO:
; Entrada:
; Si R0=20H B=3 (20..22H)=(22H,77H,66H,11H)
; Salida:
; (20..22H)=(11H,22H,66H,77H)
;=============================================================================
PUBLIC BURBUJA
EXTRN NUMBER (DIR_BYTEBAJO)
EXTRN NUMBER (CANT_BYTES_M1)
BURB SEGMENT CODE
RSEG BURB
BURBUJA:
Mov B, #CANT_BYTES_M1;
Mov R0, #DIR_BYTEBAJO;
mov r1, #00h;
Prox_comp:
mov A,@R0 ; toma dato
inc r0 ; proximo dato
subb a,@r0
jnc intercambio
inc r1 ; cantidad de acarreos
Sigo:
djnz B,Prox_comp
cjne r1,#CANT_BYTES_M1,BURBUJA
ret
intercambio:
mov a,@r0
dec r0 ; dirección anterior
xch a,@r0
inc r0
mov @r0,a
sjmp Sigo
end
PROGRAMA DE COMPROBACIÓN:
NAME PROGRAMA_COMPROBACION
; Comprobación del algoritmo para ordenar por burbuja
52. Fundamentos del lenguaje ensamblador
286
EXTRN CODE (BURBUJA)
PUBLIC DIR_BYTEBAJO
PUBLIC CANT_BYTES_M1
DIR_BYTEBAJO EQU 20h; Dirección menos significativa de la tabla
CANT_BYTES_M1 EQU 03H; Número de datos de la tabla menos 1
CALL BURBUJA
END
4.4.11.- Las subrutinas de demora.
La subrutina de demora se utiliza en aquellas aplicaciones que requieren de determinada acción cada
cierto período de tiempo bien definido. Ello puede ser en aplicaciones de Entrada/Salida para poder
brindar intervalos de tiempo con longitudes específicas y crear pulsos de determinada frecuencia y
duración.
Ejemplo 4.41:
Obtenga un pulso en "1" lógico con una duración de N msegs.
Un programa genérico puede implementarse de la siguiente forma:
OUT (PTO_1), A
--------
-------- ; Demora de N msegs
--------
OUT (PTO_2),A
donde PTO_1 y PTO_2 pueden ser dos terminales de puerto como se muestran en la fig. 4.6.
PTO_1
PTO_2
DEMORA
N mseg
7474
D
2
CLK
3
Q
5
Q
6
PR
4
CL
1
Fig. 4.6.- Método para obtener un pulso de duración específica.
El ejemplo anterior puede generalizarse a una señal de determinada frecuencia y ciclo útil impuesto por
programa a partir de la aplicación.
53. Fundamentos del lenguaje ensamblador
287
Las rutinas de demora pueden también facilitar el autochequeo, donde se espera determinado tiempo a
que un periférico ( como puede ser un impresor) esté listo para la transferencia.
La atención a un teclado necesita la supresión del tiempo de rebote (tiempo de establecimiento de los
contactos metálicos de las teclas), para el cual la generación de un tiempo de espera por programa puede
ser útil.
Para elaborar una rutina de demora puede utilizarse la siguiente fórmula:
Treal = Tfijo + Tlazo + Tajuste (4.1)
donde:
Treal =Tiempo deseado para la rutina de demora.
Tfijo =Tiempo que se demora en la ejecución de instrucciones no incluidas en el lazo de espera.
Tlazo =Tiempo que se demora en la ejecución de un lazo.
Tajuste =Tiempo que es necesario adicionar para obtener la duración total deseada.
Una secuencia ilustrativa de un programa de demora de propósito general para un microprocesador
genérico puede definirse de la siguiente forma:
SALVO REGISTROS (T1) ; Salvar a la pila los registros
; utilizados por el programa de
; demora.
INICIALIZO CONTADOR (T2) ; Se inicializa el valor del registro
; de control del lazo
LAZO:
DECREMENTO CONTADOR(T3);
SALTO SI NO ES CERO A LAZO(T4) ; Permite el control iterativo
; el valor de T4 puede ser
;diferente cuando se transfiere
; a LAZO con respecto
; a la ejecución de la
; próxima instrucción
RECUPERO REGISTROS (T5)
RETORNO (T6)
Los tiempos de demora del anterior algoritmo pueden determinarse a través de la siguiente expresión:
Tfijo =T1+T2+T5+T6+Tcall (4.2)
y
Tlazo =NN(T3+T4)-m (4.3)
donde:
NN =Valor con que es inicializado el contador.
54. Fundamentos del lenguaje ensamblador
288
Tcall =Tiempo que demora en ejecutarse la instrucción CALL que llama a la rutina de demora.
m =Valor de diferencia entre el tiempo que se demora la instrucción de salto en ir a LAZO con respecto a
la ejecución de la próxima instrucción.
Por ejemplo, una rutina de demora implementada para un microcontrolador de la serie MCS‟51 se
muestra a continuación:
DEMORA: PUSH DPL ; T1 =24t
MOV DPL,NN ; T2 =24t
LAZO: NOP ; T3 =12t
DJNZ DPL,LAZO ;T4 =24t si salta
;T4 =24t si no salta
POP DPL ;T5 =24t
RET ;T6 =24t
Donde t es el período del reloj externo que se ha conectado al microcontrolador.
La anterior demora tendría la siguiente duración:
Treal =Tfijo+Tlazo
Tfijo =T1+T2+T5+T6+Tcall=120t
Tlazo =NN(T3+T4) =NN(36)t
Treal =(120+NN(36))t
Si el microcontrolador trabaja a una frecuencia de 12MHz y el número de iteraciones se fijara en 12,
entonces la demora sería:
Treal =(120+12(36))(1/12MHz)=46segs.
Nótese como el valor de m (ver (4.3)), dentro de tiempo de lazo, no ha sido considerada en el ejemplo
anterior, ello viene dado porque el tiempo que se demora en saltar la instrucción DJNZ (que por cierto
tiene incorporada en sí el decremento de la variable contadora junto al salto) a LAZO es el mismo que el
que demora en ir a la próxima instrucción cuando la condición se cumple, lo cual no ocurre así si tal
programa fuese desarrollado para el microprocesador Z80:
PUSH DE ; T1=11t
LD D,NN ; T2=7t
LAZO: DEC D ; T3=4t
JR NZ,LAZO ; T4=12t SI SALTA
; T4=7t SI NO SALTA
POP DE ; T5=10t
RET ; T6=10t
En tal caso el tiempo de demora sería:
Tfijo =T1+T2+T5+T6 =55t
Tlazo=NN(T3+T4)-m=NN(4t+12t)-5t
55. Fundamentos del lenguaje ensamblador
289
donde m (definido por T4) es igual a 5t (el equivalente a 12t-7t).
Ejemplo 4.42:
Implemente una rutina de demora de 1mseg. para el microprocesador Z80, suponga que se trabaja a una
frecuencia de 1MHz.
Solución:
Se utilizará la misma rutina anteriormente comentada. Para obtener 1mseg. puede utilizarse (4.1):
Treal=Tfijo+Tlazo+Tajuste
Tfijo+Tlazo =55t+NN(4t+12t)-5t =1mseg.
Despejando NN, resulta:
NN = (1mseg-50t)/16t
Como t para un reloj de 1MHz es 1seg, resulta:
NN= 59.3 59
Nótese como la aproximación de NN es por defecto para que no se obtenga un tiempo superior al deseado.
El tiempo resultante sería:
Tfijo + Tlazo =(50+59(16))1seg = 994seg.
El tiempo de ajuste necesario para obtener 1mseg. sería:
Tajuste=Treal-(Tfijo+Tlazo) =1mseg-994seg =6seg.
Es necesario entonces adicionar una instrucción cuya duración sea de 6 períodos de reloj para obtener los
6seg. El programa final, que genera una demora de 1mseg puede implementarse:
PUSH DE
LD D,59D
LAZO:DEC D
JR NZ,LAZO
INC DE ; Incorpora el tiempo de ajuste
POP DE
RET
Aumentando el tiempo en una subrutina de demora.
La subrutina previamente elaborada posee un tiempo máximo límite que puede brindar (ello ocurre
cuando se inicializa NN en 00, lo que permite un lazo de 256 iteraciones). Cuando son necesarios
tiempos superiores, basta anidar lazos. Un ejemplo de subrutina desarrollada para el Z80 sería:
PUSH DE ;T1
56. Fundamentos del lenguaje ensamblador
290
LD D,NN ;T2
LAZO2:
LD E,MM ;T3
LAZO1:
DEC E ;T4
JR NZ,LAZO1 ;T5
DEC D ;T6
JR NZ,LAZO2 ;T7
POP DE ;T8
RET ;T9
Ahora el tiempo fijo sería:
Tfijo=T1+T2+T8+T9+Tcall=55t
y el tiempo del lazo:
Tlazo=NN(T3+MM*(T4+T5)-5+T6+T7)-5
Nótese como, si la rutina fuese elaborada para un microprocesador donde el tiempo de salto es el mismo
que el tiempo en ir a ejecutar la próxima instrucción ( por ejemplo, la serie MCS‟51), el término -5 no
tendría que considerarse.
Ejemplo 4.43:
NAME Demora_1
;**********************************************************
; Este programa permite: Hacer una demora cuyo rango
; para un reloj de 12 MHz ( serie MCS‟48) esta entre
; .007 mseg <= Td <= 1.282 mseg
; El tiempo puede ser calculado por la
; siguiente formula:
; Td = (24 + NN*60)t
; Siendo t : Período del reloj del sistema
; NN : Dato a decrementar que debe ser
; definido por el programador, debe
; estar en el registro R2.
;**********************************************************
; Bytes que ocupa en memoria: 6 Bytes.
;**********************************************************
; Parametros de entrada:
; R2 = NN ; Dato a decrementar.
;**********************************************************
; Registros utlilizados: A,R2.
;**********************************************************
; Forma de llamado: Call Demora1
;**********************************************************
Demora1: Mov A,R2 ; 12 periodos de reloj.
Dec A ; 12 periodos de reloj.
Mov R2,A ; 12 periodos de reloj.
JnZ Demora1 ; 24 periodos de reloj.
Ret ; 24 periodos de reloj.
End
57. Fundamentos del lenguaje ensamblador
291
Ejemplo 4.44:
NAME Demora _2.
;**********************************************************
; Este programa permite: Hacer una demora cuyo intervalo
; para un reloj de 2 MHz es:
; .05 mseg <= Td <= 526.69 mseg
; El tiempo puede ser calculado por la
; siguiente formula:
; Td = 64/FC + MM[20/FC + 16NN/FC]
; Siendo FC : Frecuencia del reloj del sistema
; NN : Dato a decrementar que debe ser
; definido por el programador, debe
; estar en el registro B.
; MM : Dato a decrementar que debe ser
; definido por el programador, debe
; estar en el registro C.
;**********************************************************
; Bytes que ocupa en memoria: 12 Bytes.
;**********************************************************
; Parametros de entrada:
; B = NN : valor a decrementar.
; C = MM ; valor a decrementar.
;**********************************************************
; Registros utlilizados: AF, BC.
;**********************************************************
; Forma de llamado: Call Demora2
;**********************************************************
.Z80
Aseg
Org 100h
Demora2: Push AF ; 11 estados de reloj
Push BC ; 11 estados de reloj
LazD2: Ld A,B ; 9 estados de reloj
LazD1: Dec A ; 4 estados de reloj
Jr nZ,LazD1 ; 12/7 estados de reloj
Dec C ; 4 estados de reloj
Jr nZ,LazD2 ; 12/7 estados de reloj
Pop BC ; 10 estados de reloj
Pop AF ; 10 estados de reloj
Ret ; 10 estados de reloj
End
Se puede tener en consideración que; alternativamente, se pueden implementar demoras utilizando las
siguientes estrategias:
a)A partir de un conjunto de instrucciones que demoren n estados (tiempos pequeños).
b)Lazos independientes unos de otros.
c)Llamar varias veces a una misma rutina.
4.4.12.- La conversión binario-BCD.