Cinemàtica directa e inversa de manipulador
•Descargar como DOCX, PDF•
1 recomendación•923 vistas

The document describes the kinematics of a 6 degree of freedom robotic arm. It presents the Denavit-Hartenberg parameters for defining each link of the robot. It then performs forward kinematics calculations to determine the transformation matrix relating the end effector to the base. It also performs inverse kinematics calculations to solve for the joint angles given a desired end effector pose. The forward and inverse kinematics solutions involve trigonometric functions of the joint angles and geometric parameters of the robot links.

Recomendados
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a Cinemàtica directa e inversa de manipulador
Similar a Cinemàtica directa e inversa de manipulador (20)
Último
Último (20)
Cinemàtica directa e inversa de manipulador
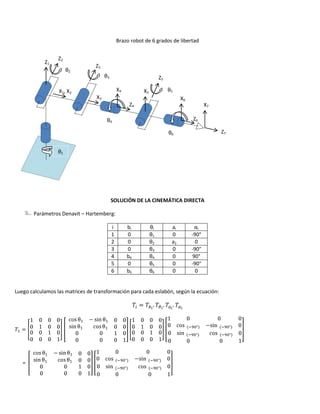
- 1. Brazo robot de 6 grados de libertad SOLUCIÓN DE LA CINEMÁTICA DIRECTA Parámetros Denavit – Hartemberg: i bi θi ai αi 1 0 θ1 0 -90° 2 0 θ2 a2 0 3 0 θ3 0 -90° 4 b4 θ4 0 90° 5 0 θ5 0 -90° 6 b6 θ6 0 0 Luego calculamos las matrices de transformación para cada eslabón, según la ecuación: = θ6 θ4 θ3 θ2 X5 X3 X1, X2 Z7 X7 X6 X4 Z6 Z4 Z1 Z5 Z3 Z2 θ1 θ5
- 2. = = = = = = =
- 3. = = = = Luego obtenemos la matriz de transformación final, según la ecuación: Para lo cual multiplicaremos matrices de izquierda a derecha, asociándolas de 2 en 2:
- 4. Luego: Haciendo uso de las propiedades trigonométricas, simplificamos los elementos de las matrices: = = = = = = = = = = = = Luego realizamos el último producto de matrices
- 6. Agrupando términos que se repiten:
- 7. Donde:
- 8. SOLUCIÓN DE LA CINEMÁTICA INVERSA Sea la matriz de transformación final, hallada anteriormente en cinemática directa: [ - cos(theta6)*(sin(theta5)*(cos(theta2)*sin(theta3) + cos(theta3)*sin(theta2)) - cos(theta4)*cos(theta5)*(cos(theta2)*cos(theta3) - sin(theta2)*sin(theta3))) - sin(theta4)*sin(theta6)*(cos(theta2)*cos(theta3) - sin(theta2)*sin(theta3)), sin(theta6)*(sin(theta5)*(cos(theta2)*sin(theta3) + cos(theta3)*sin(theta2)) - cos(theta4)*cos(theta5)*(cos(theta2)*cos(theta3) - sin(theta2)*sin(theta3))) - cos(theta6)*sin(theta4)*(cos(theta2)*cos(theta3) - sin(theta2)*sin(theta3)), - cos(theta5)*(cos(theta2)*sin(theta3) + cos(theta3)*sin(theta2)) - cos(theta4)*sin(theta5)*(cos(theta2)*cos(theta3) - sin(theta2)*sin(theta3)), a2*cos(theta2) - b4*sin(theta2 + theta3) - (b6*cos(theta2 + theta3)*sin(theta4 + theta5))/2 - b6*sin(theta2 + theta3)*cos(theta5) + (b6*sin(theta4 - theta5)*cos(theta2 + theta3))/2] [ cos(theta6)*(sin(theta5)*(cos(theta2)*cos(theta3) - sin(theta2)*sin(theta3)) + cos(theta4)*cos(theta5)*(cos(theta2)*sin(theta3) + cos(theta3)*sin(theta2))) - sin(theta4)*sin(theta6)*(cos(theta2)*sin(theta3) + cos(theta3)*sin(theta2)), - sin(theta6)*(sin(theta5)*(cos(theta2)*cos(theta3) - sin(theta2)*sin(theta3)) + cos(theta4)*cos(theta5)*(cos(theta2)*sin(theta3) + cos(theta3)*sin(theta2))) - cos(theta6)*sin(theta4)*(cos(theta2)*sin(theta3) + cos(theta3)*sin(theta2)), cos(theta5)*(cos(theta2)*cos(theta3) - sin(theta2)*sin(theta3)) - cos(theta4)*sin(theta5)*(cos(theta2)*sin(theta3) + cos(theta3)*sin(theta2)), b4*cos(theta2 + theta3) + a2*sin(theta2) - (b6*sin(theta2 + theta3)*sin(theta4 + theta5))/2 + b6*cos(theta2 + theta3)*cos(theta5) + (b6*sin(theta4 - theta5)*sin(theta2 + theta3))/2]
- 9. [ - cos(theta4)*sin(theta6) - cos(theta5)*cos(theta6)*sin(theta4), cos(theta5)*sin(theta4)*sin(theta6) - cos(theta4)*cos(theta6), sin(theta4)*sin(theta5), b6*sin(theta4)*sin(theta5)] [ 0, 0, 0, 1] [ nx*cos(theta1)*cos(theta2) - nz*sin(theta2) + ny*cos(theta2)*sin(theta1), ox*cos(theta1)*cos(theta2) - oz*sin(theta2) + oy*cos(theta2)*sin(theta1), ax*cos(theta1)*cos(theta2) - az*sin(theta2) + ay*cos(theta2)*sin(theta1), px*cos(theta1)*cos(theta2) - pz*sin(theta2) - a2 + py*cos(theta2)*sin(theta1)] [ - nz*cos(theta2) - nx*cos(theta1)*sin(theta2) - ny*sin(theta1)*sin(theta2), - oz*cos(theta2) - ox*cos(theta1)*sin(theta2) - oy*sin(theta1)*sin(theta2), - az*cos(theta2) - ax*cos(theta1)*sin(theta2) - ay*sin(theta1)*sin(theta2), - pz*cos(theta2) - px*cos(theta1)*sin(theta2) - py*sin(theta1)*sin(theta2)] [ ny*cos(theta1) - nx*sin(theta1), oy*cos(theta1) - ox*sin(theta1), ay*cos(theta1) - ax*sin(theta1), py*cos(theta1) - px*sin(theta1)] [ 0, 0, 0, 1] [ - cos(theta6)*(sin(theta3)*sin(theta5) - cos(theta3)*cos(theta4)*cos(theta5)) - cos(theta3)*sin(theta4)*sin(theta6), sin(theta6)*(sin(theta3)*sin(theta5) - cos(theta3)*cos(theta4)*cos(theta5)) - cos(theta3)*cos(theta6)*sin(theta4), - cos(theta5)*sin(theta3) - cos(theta3)*cos(theta4)*sin(theta5), - b6*(cos(theta5)*sin(theta3) + cos(theta3)*cos(theta4)*sin(theta5)) - b4*sin(theta3)] [ cos(theta6)*(cos(theta3)*sin(theta5) + cos(theta4)*cos(theta5)*sin(theta3)) - sin(theta3)*sin(theta4)*sin(theta6), - sin(theta6)*(cos(theta3)*sin(theta5) + cos(theta4)*cos(theta5)*sin(theta3)) - cos(theta6)*sin(theta3)*sin(theta4), cos(theta3)*cos(theta5) -
- 10. cos(theta4)*sin(theta3)*sin(theta5), b6*(cos(theta3)*cos(theta5) - cos(theta4)*sin(theta3)*sin(theta5)) + b4*cos(theta3)] [ - cos(theta4)*sin(theta6) - cos(theta5)*cos(theta6)*sin(theta4), cos(theta5)*sin(theta4)*sin(theta6) - cos(theta4)*cos(theta6), sin(theta4)*sin(theta5), b6*sin(theta4)*sin(theta5)] [ 0, 0, 0, 1] [ nx*cos(theta2 + theta3)*cos(theta1) - nz*sin(theta2 + theta3) + ny*cos(theta2 + theta3)*sin(theta1), ox*cos(theta2 + theta3)*cos(theta1) - oz*sin(theta2 + theta3) + oy*cos(theta2 + theta3)*sin(theta1), ax*cos(theta2 + theta3)*cos(theta1) - az*sin(theta2 + theta3) + ay*cos(theta2 + theta3)*sin(theta1), px*cos(theta2 + theta3)*cos(theta1) - a2*cos(theta3) - pz*sin(theta2 + theta3) + py*cos(theta2 + theta3)*sin(theta1)] [ nx*sin(theta1) - ny*cos(theta1), ox*sin(theta1) - oy*cos(theta1), ax*sin(theta1) - ay*cos(theta1), px*sin(theta1) - py*cos(theta1)] [ - nz*cos(theta2 + theta3) - nx*sin(theta2 + theta3)*cos(theta1) - ny*sin(theta2 + theta3)*sin(theta1), - oz*cos(theta2 + theta3) - ox*sin(theta2 + theta3)*cos(theta1) - oy*sin(theta2 + theta3)*sin(theta1), - az*cos(theta2 + theta3) - ax*sin(theta2 + theta3)*cos(theta1) - ay*sin(theta2 + theta3)*sin(theta1), a2*sin(theta3) - pz*cos(theta2 + theta3) - px*sin(theta2 + theta3)*cos(theta1) - py*sin(theta2 + theta3)*sin(theta1)] [ 0, 0, 0, 1] [ cos(theta4)*cos(theta5)*cos(theta6) - sin(theta4)*sin(theta6), - cos(theta6)*sin(theta4) - cos(theta4)*cos(theta5)*sin(theta6), -cos(theta4)*sin(theta5), -b6*cos(theta4)*sin(theta5)] [ cos(theta4)*sin(theta6) + cos(theta5)*cos(theta6)*sin(theta4), cos(theta4)*cos(theta6) - cos(theta5)*sin(theta4)*sin(theta6), -sin(theta4)*sin(theta5), -b6*sin(theta4)*sin(theta5)]
- 11. [ cos(theta6)*sin(theta5), -sin(theta5)*sin(theta6), cos(theta5), b4 + b6*cos(theta5)] [ 0, 0, 0, 1] [ nx*(sin(theta1)*sin(theta4) - cos(theta1)*(cos(theta4)*sin(theta2)*sin(theta3) - cos(theta2)*cos(theta3)*cos(theta4))) - nz*(cos(theta2)*cos(theta4)*sin(theta3) + cos(theta3)*cos(theta4)*sin(theta2)) - ny*(cos(theta1)*sin(theta4) + sin(theta1)*(cos(theta4)*sin(theta2)*sin(theta3) - cos(theta2)*cos(theta3)*cos(theta4))), ox*(sin(theta1)*sin(theta4) - cos(theta1)*(cos(theta4)*sin(theta2)*sin(theta3) - cos(theta2)*cos(theta3)*cos(theta4))) - oz*(cos(theta2)*cos(theta4)*sin(theta3) + cos(theta3)*cos(theta4)*sin(theta2)) - oy*(cos(theta1)*sin(theta4) + sin(theta1)*(cos(theta4)*sin(theta2)*sin(theta3) - cos(theta2)*cos(theta3)*cos(theta4))), ax*(sin(theta1)*sin(theta4) - cos(theta1)*(cos(theta4)*sin(theta2)*sin(theta3) - cos(theta2)*cos(theta3)*cos(theta4))) - az*(cos(theta2)*cos(theta4)*sin(theta3) + cos(theta3)*cos(theta4)*sin(theta2)) - ay*(cos(theta1)*sin(theta4) + sin(theta1)*(cos(theta4)*sin(theta2)*sin(theta3) - cos(theta2)*cos(theta3)*cos(theta4))), px*(sin(theta1)*sin(theta4) - cos(theta1)*(cos(theta4)*sin(theta2)*sin(theta3) - cos(theta2)*cos(theta3)*cos(theta4))) - pz*(cos(theta2)*cos(theta4)*sin(theta3) + cos(theta3)*cos(theta4)*sin(theta2)) - py*(cos(theta1)*sin(theta4) + sin(theta1)*(cos(theta4)*sin(theta2)*sin(theta3) - cos(theta2)*cos(theta3)*cos(theta4))) - a2*cos(theta3)*cos(theta4)] [ - nz*cos(theta2 + theta3) - nx*sin(theta2 + theta3)*cos(theta1) - ny*sin(theta2 + theta3)*sin(theta1), - oz*cos(theta2 + theta3) - ox*sin(theta2 + theta3)*cos(theta1) - oy*sin(theta2 + theta3)*sin(theta1), - az*cos(theta2 + theta3) - ax*sin(theta2 + theta3)*cos(theta1) - ay*sin(theta2 + theta3)*sin(theta1), a2*sin(theta3) - pz*cos(theta2 + theta3) - b4 - px*sin(theta2 + theta3)*cos(theta1) - py*sin(theta2 + theta3)*sin(theta1)] [ ny*(cos(theta1)*cos(theta4) - sin(theta1)*(sin(theta2)*sin(theta3)*sin(theta4) - cos(theta2)*cos(theta3)*sin(theta4))) - nx*(cos(theta4)*sin(theta1) + cos(theta1)*(sin(theta2)*sin(theta3)*sin(theta4) - cos(theta2)*cos(theta3)*sin(theta4))) - nz*(cos(theta2)*sin(theta3)*sin(theta4) + cos(theta3)*sin(theta2)*sin(theta4)), oy*(cos(theta1)*cos(theta4) - sin(theta1)*(sin(theta2)*sin(theta3)*sin(theta4) - cos(theta2)*cos(theta3)*sin(theta4))) - ox*(cos(theta4)*sin(theta1) + cos(theta1)*(sin(theta2)*sin(theta3)*sin(theta4) - cos(theta2)*cos(theta3)*sin(theta4))) - oz*(cos(theta2)*sin(theta3)*sin(theta4) +
- 12. cos(theta3)*sin(theta2)*sin(theta4)), ay*(cos(theta1)*cos(theta4) - sin(theta1)*(sin(theta2)*sin(theta3)*sin(theta4) - cos(theta2)*cos(theta3)*sin(theta4))) - ax*(cos(theta4)*sin(theta1) + cos(theta1)*(sin(theta2)*sin(theta3)*sin(theta4) - cos(theta2)*cos(theta3)*sin(theta4))) - az*(cos(theta2)*sin(theta3)*sin(theta4) + cos(theta3)*sin(theta2)*sin(theta4)), py*(cos(theta1)*cos(theta4) - sin(theta1)*(sin(theta2)*sin(theta3)*sin(theta4) - cos(theta2)*cos(theta3)*sin(theta4))) - px*(cos(theta4)*sin(theta1) + cos(theta1)*(sin(theta2)*sin(theta3)*sin(theta4) - cos(theta2)*cos(theta3)*sin(theta4))) - pz*(cos(theta2)*sin(theta3)*sin(theta4) + cos(theta3)*sin(theta2)*sin(theta4)) - a2*cos(theta3)*sin(theta4)] [ 0, 0, 0, 1] [ cos(theta5)*cos(theta6), -cos(theta5)*sin(theta6), -sin(theta5), -b6*sin(theta5)] [ cos(theta6)*sin(theta5), -sin(theta5)*sin(theta6), cos(theta5), b6*cos(theta5)] [ -sin(theta6), -cos(theta6), 0, 0] [ 0, 0, 0, 1] [ - nx*(cos(theta1)*(cos(theta2)*(sin(theta3)*sin(theta5) - cos(theta3)*cos(theta4)*cos(theta5)) + sin(theta2)*(cos(theta3)*sin(theta5) + cos(theta4)*cos(theta5)*sin(theta3))) - cos(theta5)*sin(theta1)*sin(theta4)) - ny*(sin(theta1)*(cos(theta2)*(sin(theta3)*sin(theta5) - cos(theta3)*cos(theta4)*cos(theta5)) + sin(theta2)*(cos(theta3)*sin(theta5) + cos(theta4)*cos(theta5)*sin(theta3))) + cos(theta1)*cos(theta5)*sin(theta4)) - nz*(cos(theta2)*(cos(theta3)*sin(theta5) + cos(theta4)*cos(theta5)*sin(theta3)) - sin(theta2)*(sin(theta3)*sin(theta5) - cos(theta3)*cos(theta4)*cos(theta5))), - ox*(cos(theta1)*(cos(theta2)*(sin(theta3)*sin(theta5) - cos(theta3)*cos(theta4)*cos(theta5)) + sin(theta2)*(cos(theta3)*sin(theta5) + cos(theta4)*cos(theta5)*sin(theta3))) - cos(theta5)*sin(theta1)*sin(theta4)) - oy*(sin(theta1)*(cos(theta2)*(sin(theta3)*sin(theta5) - cos(theta3)*cos(theta4)*cos(theta5)) + sin(theta2)*(cos(theta3)*sin(theta5) + cos(theta4)*cos(theta5)*sin(theta3))) + cos(theta1)*cos(theta5)*sin(theta4)) - oz*(cos(theta2)*(cos(theta3)*sin(theta5) + cos(theta4)*cos(theta5)*sin(theta3)) -
- 13. sin(theta2)*(sin(theta3)*sin(theta5) - cos(theta3)*cos(theta4)*cos(theta5))), - ax*(cos(theta1)*(cos(theta2)*(sin(theta3)*sin(theta5) - cos(theta3)*cos(theta4)*cos(theta5)) + sin(theta2)*(cos(theta3)*sin(theta5) + cos(theta4)*cos(theta5)*sin(theta3))) - cos(theta5)*sin(theta1)*sin(theta4)) - ay*(sin(theta1)*(cos(theta2)*(sin(theta3)*sin(theta5) - cos(theta3)*cos(theta4)*cos(theta5)) + sin(theta2)*(cos(theta3)*sin(theta5) + cos(theta4)*cos(theta5)*sin(theta3))) + cos(theta1)*cos(theta5)*sin(theta4)) - az*(cos(theta2)*(cos(theta3)*sin(theta5) + cos(theta4)*cos(theta5)*sin(theta3)) - sin(theta2)*(sin(theta3)*sin(theta5) - cos(theta3)*cos(theta4)*cos(theta5))), a2*(sin(theta3)*sin(theta5) - cos(theta3)*cos(theta4)*cos(theta5)) - px*(cos(theta1)*(cos(theta2)*(sin(theta3)*sin(theta5) - cos(theta3)*cos(theta4)*cos(theta5)) + sin(theta2)*(cos(theta3)*sin(theta5) + cos(theta4)*cos(theta5)*sin(theta3))) - cos(theta5)*sin(theta1)*sin(theta4)) - py*(sin(theta1)*(cos(theta2)*(sin(theta3)*sin(theta5) - cos(theta3)*cos(theta4)*cos(theta5)) + sin(theta2)*(cos(theta3)*sin(theta5) + cos(theta4)*cos(theta5)*sin(theta3))) + cos(theta1)*cos(theta5)*sin(theta4)) - pz*(cos(theta2)*(cos(theta3)*sin(theta5) + cos(theta4)*cos(theta5)*sin(theta3)) - sin(theta2)*(sin(theta3)*sin(theta5) - cos(theta3)*cos(theta4)*cos(theta5))) - b4*sin(theta5)] [ nz*(cos(theta2)*sin(theta3)*sin(theta4) + cos(theta3)*sin(theta2)*sin(theta4)) + nx*(cos(theta4)*sin(theta1) + cos(theta1)*(sin(theta2)*sin(theta3)*sin(theta4) - cos(theta2)*cos(theta3)*sin(theta4))) - ny*(cos(theta1)*cos(theta4) - sin(theta1)*(sin(theta2)*sin(theta3)*sin(theta4) - cos(theta2)*cos(theta3)*sin(theta4))), oz*(cos(theta2)*sin(theta3)*sin(theta4) + cos(theta3)*sin(theta2)*sin(theta4)) + ox*(cos(theta4)*sin(theta1) + cos(theta1)*(sin(theta2)*sin(theta3)*sin(theta4) - cos(theta2)*cos(theta3)*sin(theta4))) - oy*(cos(theta1)*cos(theta4) - sin(theta1)*(sin(theta2)*sin(theta3)*sin(theta4) - cos(theta2)*cos(theta3)*sin(theta4))), az*(cos(theta2)*sin(theta3)*sin(theta4) + cos(theta3)*sin(theta2)*sin(theta4)) + ax*(cos(theta4)*sin(theta1) + cos(theta1)*(sin(theta2)*sin(theta3)*sin(theta4) - cos(theta2)*cos(theta3)*sin(theta4))) - ay*(cos(theta1)*cos(theta4) - sin(theta1)*(sin(theta2)*sin(theta3)*sin(theta4) - cos(theta2)*cos(theta3)*sin(theta4))), pz*(cos(theta2)*sin(theta3)*sin(theta4) + cos(theta3)*sin(theta2)*sin(theta4)) + px*(cos(theta4)*sin(theta1) + cos(theta1)*(sin(theta2)*sin(theta3)*sin(theta4) - cos(theta2)*cos(theta3)*sin(theta4))) - py*(cos(theta1)*cos(theta4) - sin(theta1)*(sin(theta2)*sin(theta3)*sin(theta4) - cos(theta2)*cos(theta3)*sin(theta4))) + a2*cos(theta3)*sin(theta4)] [ - nx*(cos(theta1)*(cos(theta2)*(cos(theta5)*sin(theta3) + cos(theta3)*cos(theta4)*sin(theta5)) + sin(theta2)*(cos(theta3)*cos(theta5) - cos(theta4)*sin(theta3)*sin(theta5))) + sin(theta1)*sin(theta4)*sin(theta5)) - ny*(sin(theta1)*(cos(theta2)*(cos(theta5)*sin(theta3) + cos(theta3)*cos(theta4)*sin(theta5)) + sin(theta2)*(cos(theta3)*cos(theta5) -
- 14. cos(theta4)*sin(theta3)*sin(theta5))) - cos(theta1)*sin(theta4)*sin(theta5)) - nz*(cos(theta2)*(cos(theta3)*cos(theta5) - cos(theta4)*sin(theta3)*sin(theta5)) - sin(theta2)*(cos(theta5)*sin(theta3) + cos(theta3)*cos(theta4)*sin(theta5))), - ox*(cos(theta1)*(cos(theta2)*(cos(theta5)*sin(theta3) + cos(theta3)*cos(theta4)*sin(theta5)) + sin(theta2)*(cos(theta3)*cos(theta5) - cos(theta4)*sin(theta3)*sin(theta5))) + sin(theta1)*sin(theta4)*sin(theta5)) - oy*(sin(theta1)*(cos(theta2)*(cos(theta5)*sin(theta3) + cos(theta3)*cos(theta4)*sin(theta5)) + sin(theta2)*(cos(theta3)*cos(theta5) - cos(theta4)*sin(theta3)*sin(theta5))) - cos(theta1)*sin(theta4)*sin(theta5)) - oz*(cos(theta2)*(cos(theta3)*cos(theta5) - cos(theta4)*sin(theta3)*sin(theta5)) - sin(theta2)*(cos(theta5)*sin(theta3) + cos(theta3)*cos(theta4)*sin(theta5))), - ax*(cos(theta1)*(cos(theta2)*(cos(theta5)*sin(theta3) + cos(theta3)*cos(theta4)*sin(theta5)) + sin(theta2)*(cos(theta3)*cos(theta5) - cos(theta4)*sin(theta3)*sin(theta5))) + sin(theta1)*sin(theta4)*sin(theta5)) - ay*(sin(theta1)*(cos(theta2)*(cos(theta5)*sin(theta3) + cos(theta3)*cos(theta4)*sin(theta5)) + sin(theta2)*(cos(theta3)*cos(theta5) - cos(theta4)*sin(theta3)*sin(theta5))) - cos(theta1)*sin(theta4)*sin(theta5)) - az*(cos(theta2)*(cos(theta3)*cos(theta5) - cos(theta4)*sin(theta3)*sin(theta5)) - sin(theta2)*(cos(theta5)*sin(theta3) + cos(theta3)*cos(theta4)*sin(theta5))), a2*(cos(theta5)*sin(theta3) + cos(theta3)*cos(theta4)*sin(theta5)) - px*(cos(theta1)*(cos(theta2)*(cos(theta5)*sin(theta3) + cos(theta3)*cos(theta4)*sin(theta5)) + sin(theta2)*(cos(theta3)*cos(theta5) - cos(theta4)*sin(theta3)*sin(theta5))) + sin(theta1)*sin(theta4)*sin(theta5)) - py*(sin(theta1)*(cos(theta2)*(cos(theta5)*sin(theta3) + cos(theta3)*cos(theta4)*sin(theta5)) + sin(theta2)*(cos(theta3)*cos(theta5) - cos(theta4)*sin(theta3)*sin(theta5))) - cos(theta1)*sin(theta4)*sin(theta5)) - pz*(cos(theta2)*(cos(theta3)*cos(theta5) - cos(theta4)*sin(theta3)*sin(theta5)) - sin(theta2)*(cos(theta5)*sin(theta3) + cos(theta3)*cos(theta4)*sin(theta5))) - b4*cos(theta5)] [ 0, 0, 0, 1] [ cos(theta6), -sin(theta6), 0, 0] [ sin(theta6), cos(theta6), 0, 0] [ 0, 0, 1, b6] [ 0, 0, 0, 1]