
Recomendados
Más contenido relacionado
Similar a Microprocesadore y Microcontroladores.pdf
Similar a Microprocesadore y Microcontroladores.pdf (20)
Más de carlosPEREZMENDEZ2
Último
Último (20)
Microprocesadore y Microcontroladores.pdf
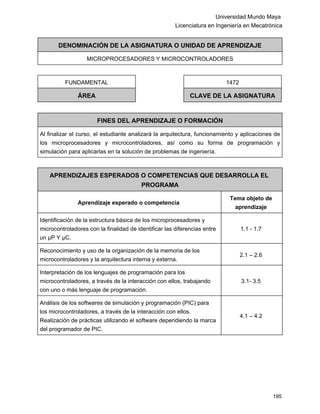
- 1. Universidad Mundo Maya Licenciatura en Ingeniería en Mecatrónica DENOMINACIÓN DE LA ASIGNATURA O UNIDAD DE APRENDIZAJE MICROPROCESADORES Y MICROCONTROLADORES FUNDAMENTAL 1472 ÁREA CLAVE DE LA ASIGNATURA FINES DEL APRENDIZAJE O FORMACIÓN Al finalizar el curso, el estudiante analizará la arquitectura, funcionamiento y aplicaciones de los microprocesadores y microcontroladores, así como su forma de programación y simulación para aplicarlas en la solución de problemas de ingeniería. APRENDIZAJES ESPERADOS O COMPETENCIAS QUE DESARROLLA EL PROGRAMA Aprendizaje esperado o competencia Tema objeto de aprendizaje Identificación de la estructura básica de los microprocesadores y microcontroladores con la finalidad de identificar las diferencias entre un µP Y µC. 1.1 - 1.7 Reconocimiento y uso de la organización de la memoria de los microcontroladores y la arquitectura interna y externa. 2.1 – 2.6 Interpretación de los lenguajes de programación para los microcontroladores, a través de la interacción con ellos, trabajando con uno o más lenguaje de programación. 3.1- 3.5 Análisis de los softwares de simulación y programación (PIC) para los microcontroladores, a través de la interacción con ellos. Realización de prácticas utilizando el software dependiendo la marca del programador de PIC. 4.1 – 4.2 195
- 2. Universidad Mundo Maya Licenciatura en Ingeniería en Mecatrónica Identificación de las bases para la programación utilizando el entorno de trabajo de CCS C Compiler. Diseño de estructuras de datos apropiadas para la solución de problemas. Reconocimiento de la semántica y la sintaxis del lenguaje de programación, simulación y realización de las prácticas de forma física. 5.1 – 5.14 Reconocimiento del funcionamiento de las interrupciones y su manejo para profundizar en las técnicas básicas de temporización de los microcontroladores. Timer 1 y 2 del microcontrolador. 6.1 - 6.4 Descripción y realización de la sucesión de etapas en la conversión de una señal análoga en una digital, utilizando los microcontroladores. 7.1 – 7.4 Realizar operaciones como registro de captura de datos, comparación de datos o como registro para fijar el ciclo de trabajo de una señal PWM. 8.1 – 8.5 CONTENIDO TEMÁTICO TEMA SUBTEMAS HD HI 1. INTRODUCCIÓN A LOS MICROPROCESADORES Y MICROCONTROLADORES 1.1. El microprocesador 1.1.1. Evolución de los microprocesadores 1.1.2. Estructura básica de un sistema microprocesador 1.1.2.1. Unidad central de proceso (CPU) 1.1.2.2. Módulo de entradas/salidas (E/S) 1.1.2.3. Buses del sistema 1.2. El microcontrolador 1.3. Diferencias entre microprocesador y microcontrolador 1.4. Ventajas de un microcontrolador frente a un microprocesador 3 4 196
- 3. Universidad Mundo Maya Licenciatura en Ingeniería en Mecatrónica 1.5. Aplicaciones de los microprocesadores y microcontroladores 1.6. Clasificación de los microcontroladores 1.7. Microcontroladores de uso común 2. ORGANIZACIÓN DE LA MEMORIA DE LOS MICROCONTROLADORES 2.1. Arquitectura interna 2.2. Organización de la memoria de programa 2.3. Organización de la memoria de datos 2.4. Arquitectura externa 2.5. La reinicialización o reset. El reloj 2.6. Principales registros de control 3 4 3. LENGUAJES DE PROGRAMACIÓN 3.1. Ensamblador 3.2. CCS 3.3. PIC BASIC 3.4. PIC BASIC PROFESIONAL 3.5. MPALAB 3 4 4. SOFTWARE DE SIMULACIÓN Y PROGRAMACIÓN DE LOS MICROCONTROLADORES 4.1. Entorno ISISProteus 4.2. Programador 4.2.1. BOOT LOADER 4.2.2. MASTER PRO 4.2.3. PIC MASTER 4.2.4. PIC150 4.2.5. Programador universal 3 4 5. CCS C 5.1. Introducción 5.2. Estructura de un programa 5.3. Tipos de datos 5.4. Las constantes 5.5. Variables 5.6. Operadores 5.7. Funciones 12 16 197
- 4. Universidad Mundo Maya Licenciatura en Ingeniería en Mecatrónica 5.8. Declaraciones de control 5.9. Comentarios 5.10. Directivas y funciones (Preprocessor (...) 5.11. Librerías, drivers y ejemplos 5.12. Entorno de trabajo de CCS C Compiler 5.13. Simulaciones 5.14. Prácticas 6. GESTIÓN DE LOS PUERTOS, INTERRUPCIONES Y TEMPORIZADORES 6.1. Gestión de puertos en C 6.1.1. Entradas y salidas 6.2. Interrupciones 6.3. TIMER0 6.4. TIMER1 y TIMER2 9 12 7. CONVERTIDOR ANALÓGICO DIGITAL 7.1. Introducción 7.2. Módulo Convertidor (gama media) 7.3. Módulo AD en C 7.4. El convertidor analógico digital, su programación y aplicaciones 9 12 8. MÓDULO CCP- COMPARADOR, CAPTURA Y PWM 8.1. Introducción 8.2. Modo Captura 8.3. Modo Comparación 8.4. Modo PWM 8.5. Módulo CCP en C 6 8 HORAS EN TOTAL DEL PROGRAMA 48 64 198
- 5. Universidad Mundo Maya Licenciatura en Ingeniería en Mecatrónica ACTIVIDADES DE APRENDIZAJE BAJO CONDUCCIÓN DE UN ACADÉMICO Análisis de la investigación bibliográfica y electrónica. Lecturas analíticas y argumentada. Mapas cognitivos de todos los temas. Resolución de problemas. Prácticas en el taller de electrónica. Simulación de las practicas realizadas. Práctica utilizando los softwares de simulación y programación para los PICs. ACTIVIDADES DE APRENDIZAJE INDEPENDIENTES Realización de mapas cognitivos. Desarrollo de ejercicios prácticos. Prácticas de electrónica de manera física y utilizando un software de simulación. Proyecto “Innovación con un PIC de gama alta”. CRITERIOS DE EVALUACIÓN » Tres exámenes parciales teóricos/prácticos 40% » Tareas en clase y extraclase 10% » Desarrollo de diagramas electrónicos y simulación 25% » Proyecto 25% 100% MODALIDADES TECNOLÓGICAS E INFORMÁTICAS » Plataforma educativa Classroom. » Biblioteca virtual e-Libro. » Software para evaluaciones online (Google Drive). » Software de simulación ISIS Proteus. » Software para generación de cuadros conceptuales (CmapTools, Lucidchart, Canva). » Software de programación. 199