Microprogramacion - Interrupciones y timers
•
2 recomendaciones•3,116 vistas

Microcontroladores y Microprogramacion - Interrupciones y timers

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Destacado
Similar a Microprogramacion - Interrupciones y timers
Similar a Microprogramacion - Interrupciones y timers (20)
Más de marco calderon layme
Más de marco calderon layme (14)
Último
Último (20)
Microprogramacion - Interrupciones y timers
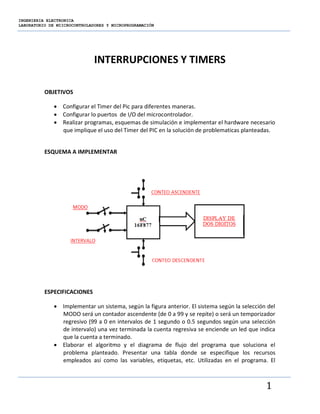
- 1. INGENIERIA ELECTRONICA LABORATORIO DE MIICROCONTROLADORES Y MICROPROGRAMACIÓN 1 INTERRUPCIONES Y TIMERS OBJETIVOS Configurar el Timer del Pic para diferentes maneras. Configurar lo puertos de I/O del microcontrolador. Realizar programas, esquemas de simulación e implementar el hardware necesario que implique el uso del Timer del PIC en la solución de problematicas planteadas. ESQUEMA A IMPLEMENTAR ESPECIFICACIONES Implementar un sistema, según la figura anterior. El sistema según la selección del MODO será un contador ascendente (de 0 a 99 y se repite) o será un temporizador regresivo (99 a 0 en intervalos de 1 segundo o 0.5 segundos según una selección de intervalo) una vez terminada la cuenta regresiva se enciende un led que indica que la cuenta a terminado. Elaborar el algoritmo y el diagrama de flujo del programa que soluciona el problema planteado. Presentar una tabla donde se especifique los recursos empleados así como las variables, etiquetas, etc. Utilizadas en el programa. El
- 2. INGENIERIA ELECTRONICA LABORATORIO DE MIICROCONTROLADORES Y MICROPROGRAMACIÓN 2 conteo y la temporización se hará empleando el Timer del PIC. Realizar y presentar los cálculos necesarios para conseguir los tiempos requeridos por el problema. Codificar el programa que soluciona y comentar todas las líneas (obligatorio). Separar las partes del programa con comentarios pertinentes (obligatorio). Simular el programa en MPLAB. Agregue las variables necesarias para poder observar los cambios de valor de las variables y verificar los resultados. Implementar el circuito solución en proteus y quemar el programa desarrollado en el microcontrolador luego simular y verificar los resultados. INDICACIONES Elaborar un informe del trabajo desarrollado, la carpeta con el proyecto MPLAB, los archivos de simulación proteus y las conclusiones obtenidas. Presentar según la hora y fecha indicadas en formato digital ( un solo archivo comprimido formato zip o rar) TRAVE DEL AULA VIRTUAL (NO SE ACEPTARAN TRABAJOS ENVIADOS POR CORREO ELECTRONICO). Colocar este formato como caratula del informe consignando el número de grupo y los integrantes del mismo. Fecha de presentación DESARROLLO ESPECIFICACIONES Implementar un sistema.el sistema según la selección de modo será un contador ascendente o descendente o será un temporizador regresivo del 99 al 0 en intervalos de 1seg y 0.5 seg según se seleccione una vez terminada la cuenta regresiva se encienda un led Para poder tener los retardos de 0.5 segundos usaremos retardos RETARDO_0_5S MOVLW D'8' MOVWF CONTADOR BUCLE_EXTERNO MOVLW D'12' ; cargamos 12 am TMR0 MOVWF TMR0 BCF INTCON,T0IF ;limpiamos la banderita del TMR0 BUCLE_INTERNO
- 3. INGENIERIA ELECTRONICA LABORATORIO DE MIICROCONTROLADORES Y MICROPROGRAMACIÓN 3 BTFSS INTCON,T0IF;testeamos si se a desbordado el TMR0 GOTO BUCLE_INTERNO DECFSZ CONTADOR,1 ;decrementamos hasta q acabe de decrementar luego salta GOTO BUCLE_EXTERNO Retardo de un segundo RETARDO_1S MOVLW D'16' MOVWF CONTADOR BUCLE_EXTERNO1 MOVLW D'12' MOVWF TMR0 BCF INTCON,T0IF BUCLE_INTERNO1 BTFSS INTCON,T0IF GOTO BUCLE_INTERNO1 DECFSZ CONTADOR,1 GOTO BUCLE_EXTERNO1 GOTO REGRESION
- 4. INGENIERIA ELECTRONICA LABORATORIO DE MIICROCONTROLADORES Y MICROPROGRAMACIÓN 4 DIAGRAMA DE FLUJO: CBLOCK 0X20 UNIDADES DECENAS TEMPORIZADOR CONTADOR CONTADOR1 CIFRA ENDC INICIO BTFSS MODO
- 5. INGENIERIA ELECTRONICA LABORATORIO DE MIICROCONTROLADORES Y MICROPROGRAMACIÓN 5 REGRESION MOVLW D'1' SUBWF TEMPORIZADOR,1 RETARDO_0_ 5S GOTO RETARDO_1S MOVLW D'99' MOVWF TEMPORIZADOR ;cargamos 99 en decimal al temporizador BTFSS INTERVALO CONTEO_DESC CONTEO_ASC MOVF TMR0,0 CALL VISUALIZACION BTFSS TIPO_CONT MOVLW 0X02 SUBWF TMR0,1 MOVLW D'99' MOVWF TMR0 MOVF TMR0,0 CALL VISUALIZACION
- 6. INGENIERIA ELECTRONICA LABORATORIO DE MIICROCONTROLADORES Y MICROPROGRAMACIÓN 6 VISUALIZACION MOSTRAR MOVF TMR0,0 CALL VISUALIZACION GOTO TEST_SWITCH CALL RETARDO_20 MS BTFSC SWITCH MOVLW D'10' SUBWF UNIDADES,0 DECIMAL_FINBTFSS STATUS,C
- 7. INGENIERIA ELECTRONICA LABORATORIO DE MIICROCONTROLADORES Y MICROPROGRAMACIÓN 7 IMPRIMIR MOVF UNIDADES,0 MOVWF PORTC MOVF DECENAS,0 MOVWF PORTD RETURN DECIMAL_RESTA10 MOVF UNIDADES,0 CALL COD_7SEG MOVWF UNIDADES MOVF DECENAS,0 CALL COD_7SEG MOVWF DECENAS BTFSS STATUS,C MOVWF UNIDADES INCF DECENAS,1 END
- 8. INGENIERIA ELECTRONICA LABORATORIO DE MIICROCONTROLADORES Y MICROPROGRAMACIÓN 8 RECURSOS DEL PIC Para elaborar el programa utilizamos varios registros del PIC para la configuración del puerto A para que funcione acorde a nuestras necesidades REGISTRO USO STATUS Para direccionar los bancos ADCON1 Para usar los pines del puerto A como digitales PORTA Para configurar las entradas y salidas TMR0 PARA USARLO COMO TEMPORIZADOR Y CONTADOR Para poder hacer más entendible el programa también usamos etiquetas, es listado de etiquetas usadas en el programa se muestra en la tabla INSTRUCCIÓN USO Btfsc f,b Si el numero b del registro f es “0” la instrucción que sigue a esta se ignora Btfss f,b Si el numero b del registro f es “1” la instrucción que sigue a esta se ignora Goto k Salto incondicional a la dirección k Bcf f,b Pone a 1 el bit b Bsf f,b Pone a 0 el bit b Call k Salvaguarda la dirección de vuelta en la pila y después llama a la subrutina situada en la dirección cargada el la PC Movlw l Mueve el contenido de l en el registro de trabajo w Movwf f Mueve el contenido del registro w al registro f
- 9. INGENIERIA ELECTRONICA LABORATORIO DE MIICROCONTROLADORES Y MICROPROGRAMACIÓN 9 VARIABLES USO UNIDADES REGISTRO PARA GURADAR EL VALOR DE LAS UNIDADES DEL DISLPAY DECENAS REGISTRO PARA GURADAR EL VALOR DE LAS DECENAS DEL DISLPAY TEMPORIZADOR REGITRO PAR HACER LAS TEMPORIACIONES CONTADOR Para el bucle : BUCLE_INTERNO CONTADOR1 Para el bucle : BUCLE_EXTERNO1 CIFRA REGISTRO PARA GUARDAR UNA VARIABLE Codificar el programa que soluciona el problema y comentar todas las líneas (obligatorias). Separar las partes del programa con comentarios pertinentes (obligatorio). LIST P=16F877A RADIX HEX __CONFIG 3F31H #INCLUDE P16F877A.INC #DEFINE MODO PORTB,5 #DEFINE INTERVALO PORTA,1 #DEFINE TIPO_CONT PORTB,4 #DEFINE SWITCH PORTA,4 #DEFINE LED PORTA,0 CBLOCK 0X20
- 10. INGENIERIA ELECTRONICA LABORATORIO DE MIICROCONTROLADORES Y MICROPROGRAMACIÓN 10 UNIDADES ; registro para las unidades DECENAS ; registro para las decenas TEMPORIZADOR ; registro para el temporizador CONTADOR ; CONTADOR1 ; CIFRA ; ENDC ORG 0 ; vector de inicio GOTO INICIO ; ORG 4 ; dirección de interrupción GOTO INTERRUPCION ; ORG 5 ; INICIO BCF STATUS,RP0 ;seleccionamos el banco 0 BCF STATUS,RP1 ; CLRF PORTA ; ponemos el PORTA a nivel bajo BSF STATUS,RP0 ;accedemos al banco1 MOVLW 0X06 ; configuramos las entradas salidas como digitales MOVWF ADCON1 MOVLW B'00010010' ; los bits 1 y 4 como entradas los demás como salidas ; para él puerto A MOVWF TRISA CLRF TRISC ; configuramos el portC y portD como salidas CLRF TRISD MOVLW B'11111111' BCF STATUS,RP0 CLRF TMR0 ; limpiamos el timer 0 MOVLW B'10001000' ; configuramos los bits del registro INTCON GIE y RBIE MOVWF INTCON CLRF PORTB BUCLE GOTO BUCLE ; cargamos un bucle infinito ; configuramos la interrupción apagar LED testeamos modo si es cero saltamos a ; TMR0_CONT si es uno a TMRO_TEMP
- 11. INGENIERIA ELECTRONICA LABORATORIO DE MIICROCONTROLADORES Y MICROPROGRAMACIÓN 11 INTERRUPCION BCF LED ; LED APAGADO BTFSS MODO ; testeamos MODO GOTO TMR0_CONT ; si es 0 saltamos a TMR0_CONT TMR0_TEM ; si es 1 ejecutamos BSF STATUS,RP0 ; MOVLW B'11010111' ; configuramos el registro option_reg MOVWF OPTION_REG ; pull ap desabilitadas trabajamos con flanco ; Ascendente ; Divisor asignado al TMRO con presacalador de 256 BCF STATUS,RP0 ; MOVLW D'99' ; cargamos el acumulador con 99 MOVWF TEMPORIZADOR ; cargamos 99 en decimal al temporizador MOVLW B'10001000' ; configuramos el registro INTCON para las ; Interrupciones MOVWF INTCON CUENTA_REGRE MOVF TEMPORIZADOR,0 ; CALL VISUALIZACION BTFSS INTERVALO ; testea a que intervalo debe de estar a un segundo o ; medio segundo GOTO RETARDO_1S ; retardo de medio segundo donde se carga 8 en decimal al contador RETARDO_0_5S MOVLW D'8' MOVWF CONTADOR BUCLE_EXTERNO MOVLW D'12' ; cargamos 12 am TMR0 MOVWF TMR0 BCF INTCON,T0IF ; limpiamos la banderita del TMR0 BUCLE_INTERNO BTFSS INTCON,T0IF ; testeamos si se ha desbordado el TMR0 GOTO BUCLE_INTERNO DECFSZ CONTADOR,1 ;decrementos hasta q acabe de decrementos luego GOTO BUCLE_EXTERNO
- 12. INGENIERIA ELECTRONICA LABORATORIO DE MIICROCONTROLADORES Y MICROPROGRAMACIÓN 12 ; cuando termine de hacer la cuenta regresiva lo que debe hacer el microcontrolador es ;encender un LED ; así en bucle infinito a menos que salga con una interrupción REGRESION MOVLW D'1' SUBWF TEMPORIZADOR,1 BTFSC STATUS,C GOTO CUENTA_REGRE BSF LED PRENDE_LED GOTO PRENDE_LED ; Retardo de un segundo que se obtiene cargando 16 en decimal al contador ; Luego 12 al TMR0 y esperar que desborde el TMR0 RETARDO_1S MOVLW D'16' MOVWF CONTADOR BUCLE_EXTERNO1 MOVLW D'12' MOVWF TMR0 BCF INTCON,T0IF BUCLE_INTERNO1 BTFSS INTCON,T0IF GOTO BUCLE_INTERNO1 DECFSZ CONTADOR,1 GOTO BUCLE_EXTERNO1 GOTO REGRESION ; En esta parte del programa se configura el microcontrolador para que funcione como ; Contador ascendente o descendente ; GIE y RBIE que será mediante el cual se haga la interrupción que es el bit 4 del PORTA TMR0_CONT BSF STATUS,RP0 MOVLW B'11111000' MOVWF OPTION_REG BCF STATUS,RP0 CLRF TMR0 BTFSS TIPO_CONT
- 13. INGENIERIA ELECTRONICA LABORATORIO DE MIICROCONTROLADORES Y MICROPROGRAMACIÓN 13 GOTO CONTEO_DESC ; Mediante interruptor se observa que en el conteo ascendente primero se configura la ; Interrupción por CONTEO_ASC MOVF TMR0,0 CALL VISUALIZACION MOVLW B'10001000' MOVWF INTCON TEST_SWITCH BTFSC SWITCH GOTO TEST_SWITCH CALL RETARDO_20MS BCF INTCON,T0IF BTFSS INTCON,T0IF GOTO MOSTRAR MOVLW D'55' MOVWF TMR0 GOTO TEST_SWITCH MOSTRAR MOVF TMR0,0 CALL VISUALIZACION GOTO TEST_SWITCH ; el conteo descendente también se hace con el TMR0 y el bit 4 del portA CONTEO_DESC MOVLW D'99' MOVWF TMR0 MOVF TMR0,0 CALL VISUALIZACION MOVLW B'10001000' MOVWF INTCON TEST_SWITCH1 BTFSC SWITCH GOTO TEST_SWITCH1 CALL RETARDO_20MS BTFSC SWITCH GOTO TEST_SWITCH1 SUELTA BTFSS SWITCH ;testea porta,4
- 14. INGENIERIA ELECTRONICA LABORATORIO DE MIICROCONTROLADORES Y MICROPROGRAMACIÓN 14 GOTO SUELTA ;testea si se suelta MOVLW 0X02 ;carga el valor de 2 en W SUBWF TMR0,1 MOVF TMR0,0 CALL VISUALIZACION BTFSS STATUS,Z ;testea el bt Z GOTO TEST_SWITCH1 MOVLW D'100' MOVWF TMR0 GOTO TEST_SWITCH1 ; Limpia todos los registro de unidades y decenas VISUALIZACION CLRF DECENAS ; limpiamos decenas y cargamos el contenido W en ; de unidades MOVWF UNIDADES ; DECIMAL_RESTA10 MOVLW D'10' ; restamos a unidades el valor de 10 en decimal SUBWF UNIDADES,0 BTFSS STATUS,C ;testeamos el carry para saber si ya llego al 9 GOTO DECIMAL_FIN ; Si es así entonces incrementamos decenas ; lo mismo hacemos con las decenas DECIMAL_INCREMENTADECENAS MOVWF UNIDADES INCF DECENAS,1 MOVLW D'10' SUBWF DECENAS,0 BTFSS STATUS,C GOTO DECIMAL_RESTA10 ; carga el contenido de unidades en W ; llama la tabla de 7 segmentos lo mismo hace con las decenas DECIMAL_FIN MOVF UNIDADES,0 CALL COD_7SEG MOVWF UNIDADES MOVF DECENAS,0 CALL COD_7SEG MOVWF DECENAS
- 15. INGENIERIA ELECTRONICA LABORATORIO DE MIICROCONTROLADORES Y MICROPROGRAMACIÓN 15 ; El contenido de unidades lo pasa al portC y el contenido de las decenas lo pasa a copiar a ; portD IMPRIMIR MOVF UNIDADES,0 MOVWF PORTC MOVF DECENAS,0 MOVWF PORTD RETURN ;la tabla del codigo de 7 segmentos COD_7SEG MOVWF CIFRA MOVF CIFRA,0 ADDWF PCL,1 RETLW B'00111111' RETLW B'00000110' RETLW B'01011011' RETLW B'01001111' RETLW B'01100110' RETLW B'01101101' RETLW B'01111101' RETLW B'00000111' RETLW B'01111111' RETLW B'01101111' ;un retardo de 20 ms RETARDO_20MS MOVLW D'20' MOVWF CONTADOR1 BUCLE1 MOVLW D'249' MOVWF CONTADOR BUCLE2 NOP DECFSZ CONTADOR,1 GOTO BUCLE2 DECFSZ CONTADOR1,1 GOTO BUCLE1 RETURN END
- 16. INGENIERIA ELECTRONICA LABORATORIO DE MIICROCONTROLADORES Y MICROPROGRAMACIÓN 16 SIMULACION Para poder obtener la simulación usamos la herramienta ISIS del software Proteus.
- 17. INGENIERIA ELECTRONICA LABORATORIO DE MIICROCONTROLADORES Y MICROPROGRAMACIÓN 17 CONCLUCIONES Para producir los retardos en este laboratorio aprendimos a utilizar el TMR0 en este ejemplo fue para crear retardos de medio y un segundo la interrupción por cambio de estado de los bits RB4:RB7 son muy útiles en el momento de utilizar varios interruptores que van a cambiar de estado Para producir el conteo también utilizamos el TMR0 que es muy práctico ya que antes utilizamos rutinas para hacer el conteo y ocupado. Aprendimos a configurar el Timer del Pic de distintas maneras. Logramos configurar correctamente las I/O del microcontrolador a la ves de crear un programa usando Timer del PIC. BIBLIOGRAFÍA (Consigne la bibliografía utilizada por usted para el desarrollo de la práctica). - MICROCONTROLADORES PIC16F877 – DESARROLLO DE PROYECTOS 2da Edicion, ENRIQUE PALACIOS M. - DATASHEET PIC 16F877A - CURSO: MICROCONTROLADORES Y MICROPROGRAMACION –CLACES PRACTICAS. ING. WILDOR FERREL SERRUTO, 2011