Acciones básicas de control laplace
•Descargar como PPT, PDF•
0 recomendaciones•645 vistas

CONTROL AUTOMATICO

Recomendados
Más contenido relacionado
Similar a Acciones básicas de control laplace
Similar a Acciones básicas de control laplace (20)
Último
Último (19)
Acciones básicas de control laplace
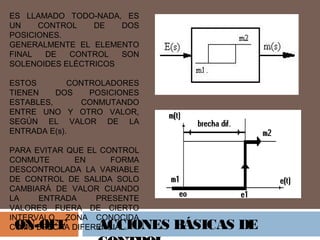
- 1. ACCIONES BÁSICAS DEON-OFF ES LLAMADO TODO-NADA, ES UN CONTROL DE DOS POSICIONES. GENERALMENTE EL ELEMENTO FINAL DE CONTROL SON SOLENOIDES ELÉCTRICOS ESTOS CONTROLADORES TIENEN DOS POSICIONES ESTABLES, CONMUTANDO ENTRE UNO Y OTRO VALOR, SEGÚN EL VALOR DE LA ENTRADA E(s). PARA EVITAR QUE EL CONTROL CONMUTE EN FORMA DESCONTROLADA LA VARIABLE DE CONTROL DE SALIDA SOLO CAMBIARÁ DE VALOR CUANDO LA ENTRADA PRESENTE VALORES FUERA DE CIERTO INTERVALO, ZONA CONOCIDA COMO BRECHA DIFERENCIAL.
- 2. ACCIONES BÁSICAS DEON-OFF DIAGRAMA 2: LIGHT SENSOR 2 (LIVEWIRE) APLICACIÓN: MOSFET
- 4. ACCIONES BÁSICAS DEPROPORCIONA L TIENE UNA SALIDA “U” PROPORCIONAL A SU ENTRADA “E”, ESTO ES: U=Kp E Kp=CONSTANTE DE PROPORCIONALIDAD ESTE CONTROL SE BASA EN ESTABLECER UNA RELACIÓN LINEAL CONTINUA ENTRE EL VALOR DE LA VARIABLE CONTROLADA Y LA POSICIÓN DEL ELEMENTO FINAL DE CONTROL. EN BASE A LA GRAFICA LA BANDA PROPORCIONAL (BP) ES LA MODIFICACIÓN EXPRESADA EN PORCENTAJE DE VARIACIÓN DE ENTRADA AL CONTROLADOR PARA PRODUCIR UN CAMBIO DEL 100% EN LA SALIDA. BP=100/Kp
- 8. ACCIONES BÁSICAS DEPROPORCIONA LINTEGRAL TIENE COMO PRÓPOSITO DISMINUIR Y ELIMINAR EL ERROR, PROVOCADO POR EL MODO PROPORCIONAL. ESTE CONTROL ACTÚA CUANDO HAY UNA DESVIACIÓN ENTRE LA VARIABLE Y EL PUNTO DE REFERENCIA INTEGRANDO ESTÁ DESVIACIÓN EN EL TIEMPO Y SUMÁNDOLA A LA ACCIÓN PROPORCIONAL. LA FÓRMULA DE INTEGRAL ES DADA POR:
- 11. ACCIONES BÁSICAS DEPROPORCIONA LDERIVATIVO LA FUNCIÓN DE ESTÉ CONTROLADOR ES MANTENER EL ERROR MÍNIMO CORRIGIÉNDOLO PROPORCIONALMENTE CON LA MISMA VELOCIDAD QUE SE PRODUCE EL ERROR EN EL SET- POINT(PUNTO DE REFERENCIA). TIENE UNA SALIDA “U” PROPORCIONAL A LA DERIVADA EN SU ENTRADA. TIENDE A AUMENTAR LA ESTABILIDAD DEL SISTEMA. LA FÓRMULA DE LA DERIVADA ES:
- 14. ACCIONES BÁSICAS DE PROPORCIONAL INTEGRAL DERIVATIVO ES UN MECANISMO DE CONTROL POR RETROALIMENTACION QUE CALCULA LA DESVIACIÓN ENTRE UN VALOR MEDIDO Y EL VALOR QUE SE QUIERE OBTENER. EL VALOR PROPORCIONAL DETERMINA LA REACCIÓN DEL ERROR ACTUAL. EL VALOR INTEGRAL GENERA UNA CORRECCIÓN PROPORCIONAL A LA INTEGRAL DEL ERROR. EL VALOR DERIVATIVO LA REACCIÓN DEL TIEMPO EN EL QUE EL ERROR SE PRODUCE. EL PID INVOLUCRA 3 PARÁMETROS DE CONTROL: 1.PROPORCIONAL 2.INTEGRAL 3.DERIVATIVO