Descargado 5473 veces
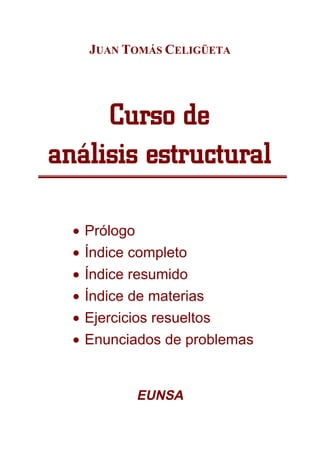







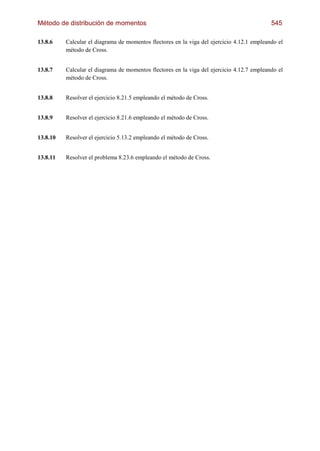
![$QHMR(VIXHU]RVGH
HPSRWUDPLHQWRSHUIHFWR
Viga empotrada en ambos extremos.
RA RB
MA MB
L
P PL P
MA = MB = RA = RB =
8 2
L/2 L/2
Pab 2 Pba 2
P MA = MB =
L2 L2
Pb 2 Pa 2
a b RA = ( L + 2 a) RB = ( L + 2 b)
L3 L3
q
qL2 qL
MA = MB = RA = RB =
12 2
c
MA =
qc
12 L2
3Lc 2 − 3bc 2 + 12 ab 2 8
q
MB =
qc
12 L
3 Lc
2
2
− 3ac 2 + 12 a b 8
2
a b qbc M A − M B qac M A − M B
RA = + RB = −
L L L L
q1 q2
MA =
L2
60
1
3q1 + 2 q2 6 MB =
L2
60
1
2 q1 + 3q2 6
(2 q1 + q2 ) L M A − M B
RA = +
6 L
(q1 + 2 q2 ) L M A − M B
RB = −
6 L
622](https://image.slidesharecdn.com/analisisestructural-juanto-120209122240-phpapp01/85/Analisis-estructural-_juan_to-11-320.jpg)




















































































































































































































































![DStWXOR
5LJLGH]GHORVHOHPHQWRV
HVWUXFWXUDOHV
7.1 INTRODUCCIÓN
El análisis de una estructura empleando el método de flexibilidad descrito en los capítulos
anteriores puede resultar muy laborioso si la estructura es medianamente compleja en
términos de grado de hiperestaticidad, número y disposición de las barras, etc. En este caso
resulta mucho más efectivo para su resolución el método de rigidez, también conocido
como de los desplazamientos. El desarrollo detallado de este método se presenta en el
capítulo 8, y en este capítulo se presentan los conceptos de rigidez de la estructura y de
rigidez de los distintos elementos estructurales, que son las magnitudes básicas en que se
fundamenta el método y por lo tanto deben conocerse antes de proceder a su desarrollo.
El método de rigidez se basa en el primer teorema de Castigliano, y una de sus
características más importantes es que lleva a una formulación muy sistemática y general,
que hace muy sencilla su aplicación práctica. Las primeras formulaciones prácticas de
métodos de análisis estructural basados en el concepto de rigidez datan de hace cierto
tiempo, como por ejemplo el método del giro - deformación de Bendixen (1914) que utiliza
directamente la rigidez a flexión de las barras, o el método de la distribución de momentos
de Cross, que se describe en el capítulo 13 y en el que el concepto de rigidez queda menos a
la vista. La aparición de los computadores digitales dio un gran empuje al empleo del
método de rigidez, ya que su formulación matricial y su naturaleza sistemática lo hacen
muy adecuado para su tratamiento mediante un algoritmo de cálculo programado en un
ordenador. De hecho, una estructura medianamente complicada no puede resolverse con
sencillez si no es empleando el método de rigidez con formulación matricial, y tampoco el
método de rigidez puede aplicarse con sencillez a casos reales si no se programa en un
computador.
241](https://image.slidesharecdn.com/analisisestructural-juanto-120209122240-phpapp01/85/Analisis-estructural-_juan_to-256-320.jpg)
























































































































































































































































































































































































































































Este documento presenta el índice de contenidos de un libro de análisis estructural. El índice incluye 14 capítulos que cubren temas como teoremas fundamentales de elasticidad, análisis de celosías, vigas, pórticos, arcos, rigidez de elementos estructurales, métodos de análisis como el método de rigidez y flexibilidad, análisis de estructuras simétricas, líneas de influencia, vigas en fundación elástica, condensación de ecuaciones, método de














































![Estruc dinam[1]](https://cdn.slidesharecdn.com/ss_thumbnails/estrucdinam1-120823233034-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)













