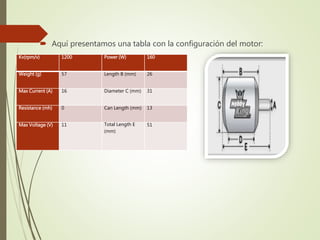
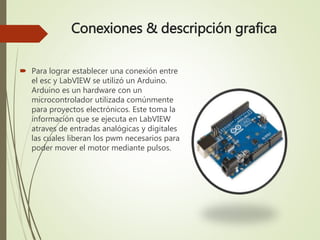
Este documento describe el modelado mecánico y eléctrico de un sistema de balancín. Explica que el balancín puede analizarse como un sólido rígido alrededor de su eje central de inercia, y presenta una ecuación para describir su movimiento de rotación. También detalla los componentes eléctricos como el motor brushless y el control de velocidad, y explica que el control se desarrolló usando LabVIEW con herramientas adicionales.