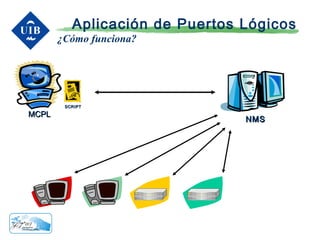
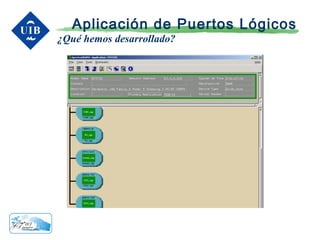
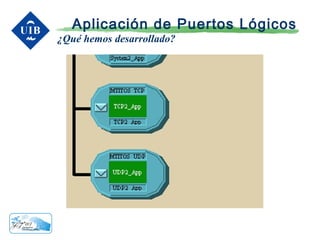
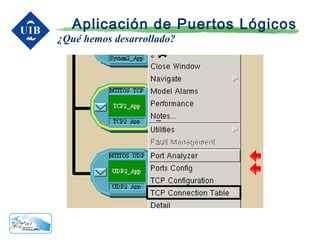
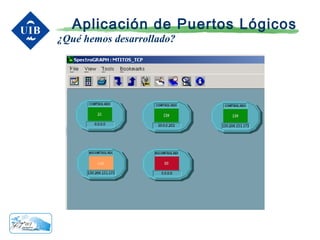
Este documento describe una aplicación para controlar puertos lógicos TCP y UDP. Explica la problemática de puertos no deseados y cómo la aplicación funciona mediante la comunicación entre un script, la aplicación de control de puertos lógicos y una base de datos centralizada. También resume los componentes desarrollados, que incluyen la interfaz de usuario, la base de datos y funcionalidades como la gestión de dispositivos, IPs, incidencias y conexiones.



















































































![Medidas de almacenamiento[1]](https://cdn.slidesharecdn.com/ss_thumbnails/medidasdealmacenamiento1-131111155739-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)

























