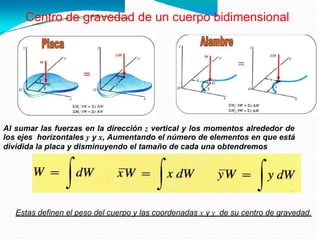
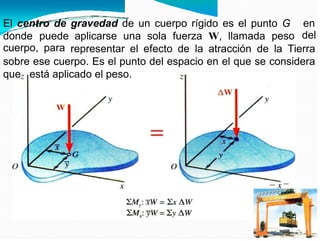
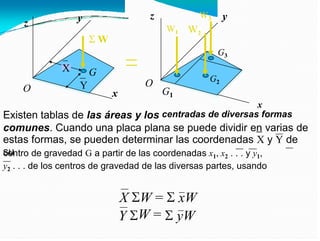
El documento detalla el cálculo del centro de gravedad de cuerpos bidimensionales, enfatizando cómo las fuerzas y momentos se combinan para determinar las coordenadas del centro de gravedad. También aborda los momentos de inercia y su importancia en el análisis mecánico, incluyendo cómo se relacionan con la resistencia de materiales y la dinámica de cuerpos en rotación. Finalmente, se discuten las integrales y fórmulas necesarias para calcular centroides y momentos de inercia para diversas formas geométricas.


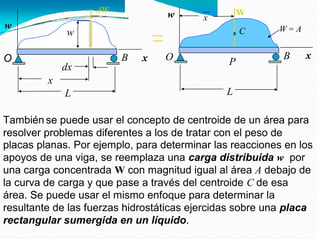

![Vigas con cargas DISTRIBUIDAS
w
w
w
dW
W-'> [N/m]
W=A
-
(OP)W = fxdW
ldw = wdx = dA y
W
=
Al
W= fdA (¡)A - J:xdA tjXA
- fxdA
-
=A
X](https://image.slidesharecdn.com/centroides-e-inercia-200413043342-240802010251-4959252b/85/centroides-e-inercia-20041304388342-pptx-22-320.jpg)