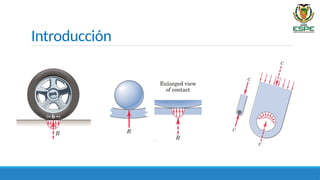
Introducción
Distrución Lineal:
Cuando unafuerza está
distribuida a lo largo de
una línea intensidad de
la carga está en N/m
Distrución Superficial:
Cuando una fuerza está
distribuida sobre una superficie,
fluidos (presión, KPa), fuerza
distribuidas internas de sólidos
(esfuerzos, MPa)
Distribución Cúbica:
Cuando una fuerza está
distribuida a lo largo de un
volumen ocupado por un
cuerpo, la intensidad de la
fuerza gravitatoria es el peso
específico (N/m3)
5.
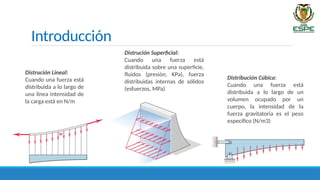
Centro de Masa
•Se aplica el principio de momentos, el
momento de la fuerza gravitatoria resultante W
respecto a cualquier eje es igual a la suma de
los momentos respecto al mismo eje de las
fuerzas gravitatorias dW que actúan en todas
las partículas consideradas como elementos
infinitesimales del cuerpo.
• Peso de todos los diferenciales W=ꭍdW
• Peso del cuerpo es W
• Momento de todos los diferenciales con
respecto al eje “y” xW=ꭍx.dW
6.
• W=mg
• dW= g.dm
• Reemplazo las expresiones anteriores
en xW=ꭍx.dW
• m.g.x = ꭍx.g.dm
• m.x = ꭍx.dm
• Tratando esta expresión en términos de
vectores posición tenemos m.r = ꭍ r.dm
Centro de Masa
7.
Centro de Masa
•Centro de gravedad: Cuando los efectos gravitatorios
intervienen en los cálculos, fuera del campo
gravitatorio carece de sentido hablar de centro de
gravedad
• Centro de masa: Coincide con en centro de gravedad,
define un punto único del cuerpo cuya posición
depende exclusivamente de cómo está distribuida la
masa, se habla e estos términos ara objetos reales
• Centroide: Define una propiedad netamente
geométrica de los cuerpos, sin referencia a
propiedades físicas.
• El centro de masa coincide con el centro de gravedad
cuando la densidad del cuerpo es homogénea.
8.
• Sabemos quela densidad de un cuerpo
es la masa por unidad de volumen
ρ=m/V
• m=ρ.V= ρ.A.L
• dm=ρ.dV= ρ.A.dL
• Reemplazando en m.x = ꭍx.dm
• dm=ρ.A.dL reemplazando queda:
ρ.A.L.x = ꭍx.ρ.A.dL
• L.x = ꭍx.dL
Centroides (líneas, alambres delgados)
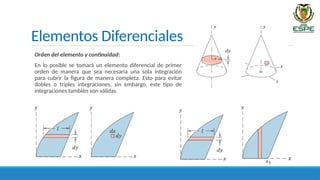
Elementos Diferenciales
Orden delelemento y continuidad:
En lo posible se tomará un elemento diferencial de primer
orden de manera que sea necesaria una sola integración
para cubrir la figura de manera completa. Esto para evitar
dobles o triples integraciones, sin embargo, este tipo de
integraciones también son válidas.
11.
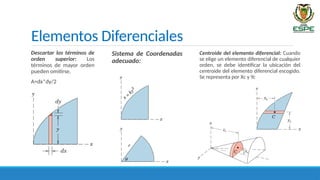
Elementos Diferenciales
Descartar lostérminos de
orden superior: Los
términos de mayor orden
pueden omitirse.
A=dx*dy/2
Sistema de Coordenadas
adecuado:
Centroide del elemento diferencial: Cuando
se elige un elemento diferencial de cualquier
orden, se debe identificar la ubicación del
centroide del elemento diferencial escogido.
Se representa por Xc y Yc
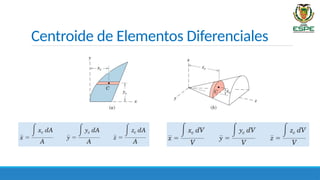
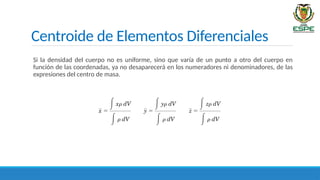
Centroide de ElementosDiferenciales
Si la densidad del cuerpo no es uniforme, sino que varía de un punto a otro del cuerpo en
función de las coordenadas, ya no desaparecerá en los numeradores ni denominadores, de las
expresiones del centro de masa.
14.
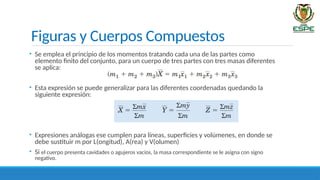
Figuras y CuerposCompuestos
• Se emplea el principio de los momentos tratando cada una de las partes como
elemento finito del conjunto, para un cuerpo de tres partes con tres masas diferentes
se aplica:
• Esta expresión se puede generalizar para las diferentes coordenadas quedando la
siguiente expresión:
• Expresiones análogas ese cumplen para líneas, superficies y volúmenes, en donde se
debe sustituir m por L(ongitud), A(rea) y V(olumen)
• Si el cuerpo presenta cavidades o agujeros vacíos, la masa correspondiente se le asigna con signo
negativo.
15.
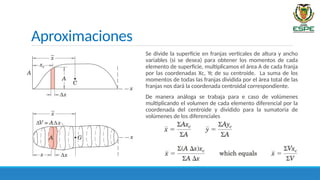
Aproximaciones
Se divide lasuperficie en franjas verticales de altura y ancho
variables (si se desea) para obtener los momentos de cada
elemento de superficie, multiplicamos el área A de cada franja
por las coordenadas Xc, Yc de su centroide. La suma de los
momentos de todas las franjas dividida por el área total de las
franjas nos dará la coordenada centroidal correspondiente.
De manera análoga se trabaja para e caso de volúmenes
multiplicando el volumen de cada elemento diferencial por la
coordenada del centroide y dividido para la sumatoria de
volúmenes de los diferenciales
16.
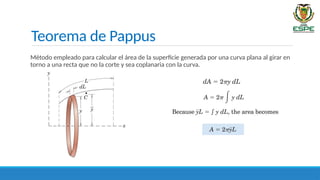
Teorema de Pappus
Métodoempleado para calcular el área de la superficie generada por una curva plana al girar en
torno a una recta que no la corte y sea coplanaria con la curva.
17.
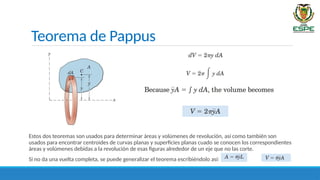
Teorema de Pappus
Estosdos teoremas son usados para determinar áreas y volúmenes de revolución, así como también son
usados para encontrar centroides de curvas planas y superficies planas cuado se conocen los correspondientes
áreas y volúmenes debidas a la revolución de esas figuras alrededor de un eje que no las corte.
Si no da una vuelta completa, se puede generalizar el teorema escribiéndolo así:
18.
Momentos de Inercia
Elmomento de inercia es una propiedad física de un cuerpo que describe su resistencia a la
rotación alrededor de un eje. Es análogo a la masa en el movimiento lineal, pero en este caso, se
aplica al movimiento rotacional. También se conoce como momento de inercia de área o
simplemente inercia rotacional.
Se aplica el principio de momento con respecto de un eje de rotación de un conjunto de
esfuerzos aplicados sobre la superficie interna del material los mismos (los esfuerzos) que varían
con la distancia con respecto de un eje fijo de rotación.
A este principio se le conoce con el nombre de momento estático de segundo orden, puesto que
el momento de primer orden y.dA se multiplica por el brazo de momento “y” para dar el
momento de segundo orden del elemento dA.
El momento de inercia se una superficie es una propiedad puramente matemática de esa
superficie y, de por sí, carece de significado físico.
19.
Momentos de Inercia
Elprincipio de momentos y el momento de inercia están estrechamente relacionados en el contexto del
movimiento rotacional y del equilibrio estático. Ambos conceptos involucran el análisis de momentos, pero se
aplican en diferentes áreas:
Momento: Es el producto de una fuerza (F) y la distancia (r) perpendicular desde un punto o eje:
M=F r
⋅
Momento de Inercia: Es una medida acumulativa de la resistencia de una masa o área a rotar respecto a un
eje. Se calcula sumando (o integrando) productos de las masas o áreas por el cuadrado de su distancia al eje:
I=∫r2
dm o I=∫y2
dA
El principio de momentos describe cómo actúan las fuerzas (y sus momentos) para causar rotación o
equilibrio
El momento de inercia determina cuánto resiste un cuerpo (debido a su distribución de masa o área)
esa rotación causada por los momentos
20.
Momentos de Inercia
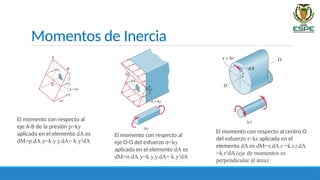
Elmomento con respecto al
eje A-B de la presión p=ky
aplicada en el elemento dA es
dM=p.dA.y=k.y.y.dA= k.y2
dA
El momento con respecto al
eje O-O del esfuerzo σ=ky
aplicada en el elemento dA es
dM=σ.dA.y=k.y.y.dA= k.y2
dA
El momento con respecto al centro O
del esfuerzo τ=kr aplicada en el
elemento dA es dM=τ.dA.r =k.r.r.dA
=k.r2
dA (eje de momentos es
perpendicular al área)
21.
Momentos de Inercia
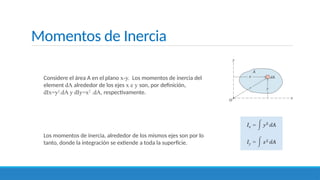
Considereel área A en el plano x-y. Los momentos de inercia del
element dA alrededor de los ejes x e y son, por definición,
dIx=y2
.dA y dIy=x2
.dA, respectivamente.
Los momentos de inercia, alrededor de los mismos ejes son por lo
tanto, donde la integración se extiende a toda la superficie.
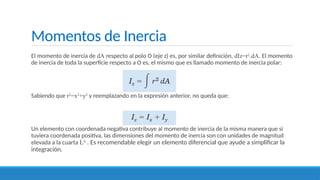
22.
Momentos de Inercia
Elmomento de inercia de dA respecto al polo O (eje z) es, por similar definición, dIz=r2
.dA. El momento
de inercia de toda la superficie respecto a O es, el mismo que es llamado momento de inercia polar:
Sabiendo que r2
=x2
+y2
y reemplazando en la expresión anterior, no queda que:
Un elemento con coordenada negativa contribuye al momento de inercia de la misma manera que si
tuviera coordenada positiva, las dimensiones del momento de inercia son con unidades de magnitud
elevada a la cuarta L4
. Es recomendable elegir un elemento diferencial que ayude a simplificar la
integración.
23.
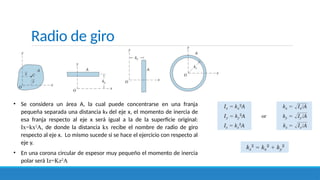
Radio de giro
•Se considera un área A, la cual puede concentrarse en una franja
pequeña separada una distancia kx del eje x, el momento de inercia de
esa franja respecto al eje x será igual a la de la superficie original:
Ix=kx2
A, de donde la distancia kx recibe el nombre de radio de giro
respecto al eje x. Lo mismo sucede si se hace el ejercicio con respecto al
eje y.
• En una corona circular de espesor muy pequeño el momento de inercia
polar será Iz=Kz2
A
24.
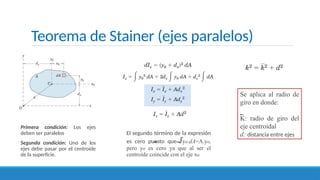
Teorema de Stainer(ejes paralelos)
El segundo término de la expresión
es cero puesto que ꭍyo.dA=A.yo,
pero yo es cero ya que al ser el
centroide coincide con el eje xo
Primera condición: Los ejes
deben ser paralelos
Segunda condición: Uno de los
ejes debe pasar por el centroide
de la superficie.
Se aplica al radio de
giro en donde:
K: radio de giro del
eje centroidal
d: distancia entre ejes
25.
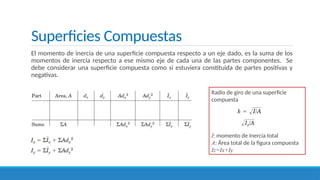
Superficies Compuestas
El momentode inercia de una superficie compuesta respecto a un eje dado, es la suma de los
momentos de inercia respecto a ese mismo eje de cada una de las partes componentes. Se
debe considerar una superficie compuesta como si estuviera constituida de partes positivas y
negativas.
Radio de giro de una superficie
compuesta
I: momento de Inercia total
A: Área total de la figura compuesta
Iz=Ix+Iy