Descargar para leer sin conexión



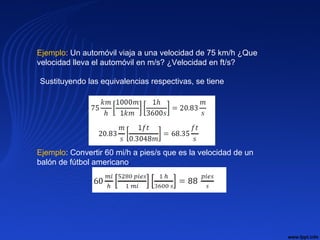


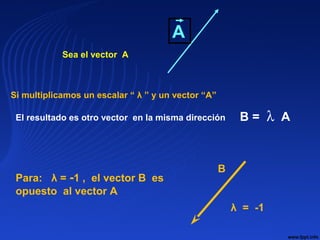
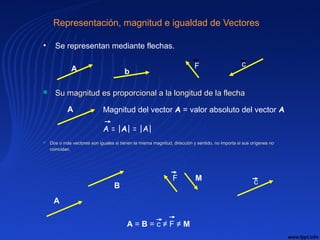
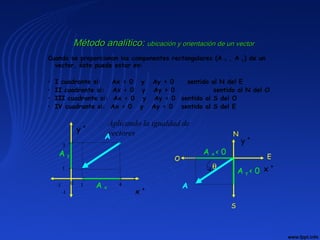
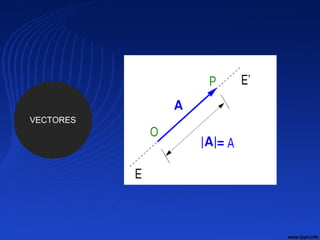
![VECTORES IGUALES.- Si tienen su módulo, dirección
y sentido iguales
α β
A B
Si A y B son iguales se cumple
[ A] = [ B]
α = β
Sentido de A = Sentido de B](https://image.slidesharecdn.com/clase1-2018-2-181115162405/85/Clase-1-2018-2-58-320.jpg)










El documento proporciona un resumen de la historia de la física desde sus orígenes hasta el siglo XXI. Comienza describiendo los primeros avances en Egipto y Grecia antigua, luego menciona figuras clave como Arquímedes, Kepler, Galileo y Newton. Explica que la física se dividió en clásica y moderna, con Einstein y la teoría cuántica transformando el campo en el siglo XX. Concluye que se esperan mayores avances en el siglo XXI.























































