Descargado 1498 veces









































































![Circuitos magnéticos con imanes permanentes 73
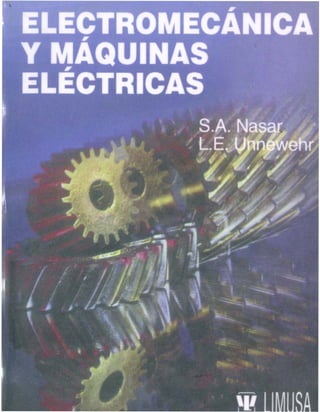
Imán
~I~~-------w--------~>~I
FIGURA 2.15 Circuito magnético con imán permanente
ma un factor de fuga para esta configuración, que se basa en mediciones
experimentales y cálculos semejantes a los descritos previamente en este
capítulo, con un valor
(2.40)
donde
CH = perímetro de la sección transversal del circuito de long. H
Cw = perímetro de la sección transversal del circuito de long. W
Ce = perímetro de la sección transversal del circuito de long. G
El factor 0.67 en el tercer término dentro del paréntesis rectangular en la
ecuación (2.40) procede de la característica de los imanes permanentes de
tener una "zona neutral" que no contribuye a la figura. A partir de los calcu-
los de longitud y área anteriores, es posible calcular los parámetros de lon-
gitud en la ecuación (2.40) y estimar los perímetros de las diversas secciones
transversales: H = 2.22 cm, G = 0.91 cm, W =6.0 cm, Ce =8 c, Cw
=8.0
cm y CH = 7.8 cm. Sustituyendo estos valores en la ecuación (2.40) se
obtiene
K] =4.062
Este valor puede introducirse en la ecuación (2.39), originando un cambio
ligero en el área A In del imán. A la vez este cálculo puede requerir algunos](https://image.slidesharecdn.com/308553756-electromecanica-y-maquinas-electricas-nasar-160702045522/85/Electromecanica-y-maquinas-electricas-nasar-75-320.jpg)






























![104 Transformadores
1 [ 100 20 ]</>= - 200 - 377cos377t+ 1885 cos 1885t
= 0.00133 cos377t - 5.3 X 10-5 cos 1885t
Los valores rcm son
[
(.00133)2 (5.3 X 10-
5
)2]
$= 2 + 2 =0.0094 Wb
_y[100
2
20-]v- --+-2 2
=72.1 V
Ejemplo 3.5
En un cierto transformador probado con secundario abierto (sin carga) se
midió una pérdida por núcleo de 400 W cuando la corriente en régimen sin
carga era de 2.5 A Y el voltaje inducido de 400 V (los valores de voltaje
y corriente son rcm). No se deben considerar la resistencia del devanado ni
el flujo de fuga. Determinar: (1) el factor de potencia en régimen sin carga;
(2) el valor rcm de la corriente magnetizante y (3) el valor rcm de la com-
ponente de corriente de pérdida por núcleo.
1. Factor de potencia: PF=(l50)j(2.5)(4oo)=0.15.
2. Corriente magnetizante: Ilq, = 2.5 sen (cos- 1 0.15)
= 2.5 (sen 81.40
) = 2.42A
3. Corriente de pérdida por núcleo: I le = 150j(4oo)=2.5(cos 81.4°)
=0.375A
Ejemplo 3.6
La capacidad de un transformador es de 100 kVA (kilo volt-amperes); con
400 V en el primario y 200 V en el secundario. Sin considerar los VA mag-
tizantes y de pérdida por núcleo, determinar la razón de vueltas y las capa-
cidades de corriente del devanado.
La razón de vueltas es aproximadamente igual a 400/200 ó a = 2. Su-
poniendo que ambos devanados se tasan para la estipulación VA del transo
formador,
I = 100,000 = 250A- I = 100,000 =5OOA
1 400 '2 200
Nótese que las capacidades del transformador se dan siempre en términos
de parámetros rcm.](https://image.slidesharecdn.com/308553756-electromecanica-y-maquinas-electricas-nasar-160702045522/85/Electromecanica-y-maquinas-electricas-nasar-106-320.jpg)



















![124 Transformadores
Estos circuitos equivalentes, que contienen capacitancias, son ade-
cuados para modelar transformadores en frecuencia donde tiene impor-
tancia la capacitancia distribuida.
En la referencia 9 se dan los métodos para medir las capacitancias concen-
tradas equivalentes CI , C2 y C12 • Los análisis de circuitos equivalentes
con capacitancias mediante cálculos "a mano" son sumamente tediosos,
por lo que es casi una necesidad usar programas de análisis de circuitos por
computadora.
3.6 CORRIENTE DE IRRUPCION
Gran parte de este capítulo se ha dedicado a la teoría y análisis de trans-
formadores en estado estacionario. Empero, hay un aspecto de las carac-
terísticas transitorias del transformador que merece atención especial: la
alta corriente, potencialmente hablando, que puede surgir en el preciso
momento de energizarlo con una fuente de voltaje sinusoidal. Este pico de
corriente inicial, llamado corriente de irrupción, es incontrolable desde un
punto de vista práctico. Puede resultar un pico de corriente varias veces
superior a la corriente nominal del transformador o puede ser inobservable.
Es el tóxico del estudiante (o instructor) de laboratorio de máquinas eléc-
tricas y tiene suma importancia durante la energización de los grandes trans-
formadores de potencia. Es posible explicarla de una manera relativamente
simple, como sigue.
La corriente de irrupción se modifica en cierto modo por la carga del
transformador. Es más observable en el régimen sin carga, y bajo esta con-
dición se ilustrará este fenómeno. Sin tomar en cuenta la pérdida por núcleo
y la resistencia del primario, la relación entre voltaje y flujo en régimen sin
carga puede describirse de la ecuación (3.3) y (3.4) así:
(3.40)
donde a = argumento del término seno en t = O. La solución de esta ecua-
ción diferencial lineal de primer orden es
V1m ]
cp= wN [cosa-cos(wt+a)
=<I>m[cosa -cos(wt+ a)] (3.41)
Se ve que el flujo tiene dos componentes: la transitoria y la de estado
estacionario. Puesto que no se ha considerado la pérdida por núcleo ni la
resistencia de primario, el término transitorio 1>m cos a no tiene factor de
decremento alguno. Desde luego en un transformador práctico está presen-](https://image.slidesharecdn.com/308553756-electromecanica-y-maquinas-electricas-nasar-160702045522/85/Electromecanica-y-maquinas-electricas-nasar-126-320.jpg)





























![154 Sistemas electromecánicos
la que, expresada en términos ·de inductancia y corriente, se convierte en
Para variaciones dadas de corriente e inductancia,
Si se permite que el rotor gire con una velocidad angular w m tal que en
cualquier instante
O=Wmt - o
.(o es la posición del rotor en t =O, cuando la corriente i es también cero),
la expresión para el par instantáneo queda entonces en términos de W y
Ü)m como
Te = - ~ I~L'{sen2(wmt- o) - ~ [sen2(wmt +wt- o)
+sen2(wm t -wt - o) ] }
Para obtener la forma final anterior, se usaron las siguientes identidades
trigonométricas:
sen2
A = -!(1-cos2A)
y
1 1
sen ecos D =2' sen (e + D) + 2' sen (e - D)
De la expresión anterior se concluye que el par promediado en el tiempo
es cero, ya que el valor de cada término integrado en un período es cero.
El único caso en que el par promedio no es cero es cuando w =W m • Para
esta frecuencia particular, la magnitud del par promedio es
o, de la figuro:) 4.6b,
T - 1]2 L' ')<
prom - 4. m sen_o
Tprom =iI~ (L d - Lq )sen2ú
Así, por ejemplo, en 1m =4 A, Ld =0.2 H y Lq =0.1 H y el par promedio
máximo es 0.2 N-m (Newton-metro).](https://image.slidesharecdn.com/308553756-electromecanica-y-maquinas-electricas-nasar-160702045522/85/Electromecanica-y-maquinas-electricas-nasar-156-320.jpg)







![162 Sistemas electromecánicos
(4.25)
Como se mencionó en la última sección, estas ecuaciones son no lineales y
no es posible obtener soluciones analíticas explícitas. No obstante, para
señales débiles y movimiento incremental, puede obtenerse información
útil sobre el sistema resolviendo las correspondientes ecuaciones de movi-
miento diferenciales linealizadas.
Además de la limitación a señales débiles, la linealización de las ecua-
ciones para un sistema físico dado, requiere que exista un punto de equi-
librio estable. Las señales pequeñas (o movimiento) son los recorridos
alrededor de este punto de equilibrio. Sea que (Vo, lo, Xo ) denoten al
punto de equilibrio estable en estado estacionario, tales que
v(t)= Vo+VI(t)
i(t)=lo+il(t)
x(t)=Xo+xl(t)
(4.26)
donde (v, i, x) son las variables originales y (v 1, Xl, i 1) pequeñas per-
turbaciones alrededor de (Vo, lo, Xo ). La pequeñez se mide por hecho
de que términos de tipo producto como ¡2, i1 X 1 etc., son desprecia-
bles. Sin perder de vista estas limitaciones, se examinarán los términos
no lineales en (4.24) Y (4.25). Por ejemplo, sustituyendo x = Xo + Xl
en (4.19), se obtiene
/LoaN
2
/LoaN
2
( 1 )
L= ll-X = II-Xo-x l =Lo 1-xl/(lI-Xo)
(
X )-1=Lo 1___1_
ll-Xo
(4.27)
donde Lo = [JloaN2
/(11 - Xo )]. Para valores pequeños de Xl' (4.27) pue-
de desarrollarse en serie binómica como
L=Lo 1+--+ - - + - - + ...
[
XI (X I )2 ( XI )3 111- Xo tI - Xo 11- Xo
(4.28)
Además, de (4.28) se obtiene
- = - - 1+--+3 - - + ...aL Lo [ 2xI (X I )2 1
aXI 11 - Xo 11- Xo 11
- Xo
(4.29)](https://image.slidesharecdn.com/308553756-electromecanica-y-maquinas-electricas-nasar-160702045522/85/Electromecanica-y-maquinas-electricas-nasar-164-320.jpg)





























































![224 La máquina con conmutador para e.e.
para cada valor de corriente de campo. El producto del par de entrada
(en Nw-m) por la velocidad de flecha (en rad/seg) es la potencia suminis-
trada a la máquina sujeta a prueba. El producto es una medida de la pérdi-
da sin carga de la máquina, para valores particulares de velocidad y corriente
de campo. Esta pérdida es la suma de las pérdidas mecánicas y magnéticas.
La prueba sin carga se repite para varios valores de velocidad que abarcan
el rango de velocidad de operación de la máquina que se prueba. La familia
de curvas resultante describe la variación de las pruebas mecánicas y magné-
ticas dentro del rango de velocidad y excitaciones (corrientes de campo)
utilizadas en la prueba.
En algunas máquinas en serie y en muchas de bajo potencia, no están
accesibles las terminales de devanado de campo y la prueba descrita arriba
no puede efectuarse. Además, muchos laboratorios y recursos de prueba no
cuentan con una máquina de impulsión adecuada para operar la máqui·
na en prueba como generador. En circunstancias que imposibiliten la prue-
ba sin carga, puede obtenerse alguna información del mismo tipo, operando
la máquina en prueba como motor sin carga. Las curvas de magnetización
se pueden obtener variando el voltaje de armadura al cambiar la corriente
de campo, para"mantener una velocidad constante y midiendo la corrien-
te y voltaje de armadura, la corriente de campo y la velocidad.
El rango de valores de corriente de campo que puede obtenerse a ve-
locidad constante de esta manera, es menor que el que se logra por el mé-
todo del generador sin carga. Como el motor carece de carga, será pequeña
la corriente de armadura y los efectos de la reacción de inducido no serán
de consideración. El voltaje inducido E se calcula restando la pequeña caÍ-
da de voltaje en la resistencia de armadura al voltaje terminal de armadura
medido. La pérdida sin carga se determina restando de la entrada de po-
tencia de armadura la pérdida ]2 r de armadura. El minuendo es igual al
producto de corriente de armadura por el voltaje terminal de armadura.
Deben tomarse precauciones al operar un motor sin carga externa, para
que la velocidad de operación máxima, dentro de las normas de seguridad
del motor, no se exceda durante la prueba en valores bajos de corriente de
campo.
5.10.1 Calibración de la máquina
La máquina con conmutador excitada separadamente o en derivación es
un dispositivo muy versátil, ya que su par puede controlarse en un rango
bastante amplio de velocidades, en operación como motor o como genera-
dor. En virtud de esta posibilidad, se le usa ampliamente en el laboratorio
como un dispositivo de carga para probar máquinas eléctricas rotatorias,
máquinas de combustión interna y muchos otros tipos de máquinas. La
principal aplicación de la máquina de conmutador de c.c. excitada separa-](https://image.slidesharecdn.com/308553756-electromecanica-y-maquinas-electricas-nasar-160702045522/85/Electromecanica-y-maquinas-electricas-nasar-226-320.jpg)

![226 La máquina con conmutador para e.e.
máquina en prueba. La diferencia entre la entrada de potencia al
motor impulsor medida en este paso y la medida en el paso 3 para
cada punto de velocidad, es la pérdida magnética de la máquina en
prueba para el valor prescrito de corriente de campo. Este paso de-
be repetirse para diferentes valores de corriente de campo -los su-
ficientes para cubrir el rango de operación de la máquina en prueba
ya que va a usarse como una máquina "calibrada".
5. Debe obtenerse un valor exacto de la resistencia de armadura de la
máquina en prueba, que puede incluir o no la resistencia por con-
tacto de escobilla, dependiendo de los factores que se trataron en
secciones anteriores de este capítulo. Deben conocerse las caracte-
rísticas de resistencia contra temperatura de la resistencia de arma-
dura y de la resistencia por contacto de escobilla. Esta es una tarea
bastante sencilla para el propio devanado de armadura, si se cono-
ce el material conductor. Si va a tratarse la pérdida eléctrica por es-
cobilla independientemente de la pérdida por devanado de armadura
(lo que se hace con frecuencia para máquinas de potencia con es-
cobillas de grafito), debe medirse la caída de voltaje por contacto
de escobilla en función de la corriente de armadura. En máquinas
pequeñas o en las de escobillas con grafito al metal, puede general-
mente agruparse la resistencia por contacto de armadura con la
de devanado de armadura y la resistencia medida en las terminales de
armadura puede emplearse para calcular la pérdida eléctrica de ar-
madura. Se hacen variaciones de temperatura de resistencia, supo-
niendo, en este caso, las características del material conductor de
devanado.
6. El último paso implica la medición de la pérdida por carga parási-
ta. Como se habrá observado antes, esta pérdida a menudo se igno-
ra. La prueba que sigue puede usarse para determinar si tiene o no
importancia: la máquina en prueba se impulsa a una velocidad dada
por el motor impulsor como en los pasos anteriores. Con excitación
de campo nula se cortocircuita el circuito de armadura. Aparecerá
una corriente de armadura pequeña en virtud del magnetismo resi-
dual. Auméntese lentamente y con sumo cuidado la excitación de
campo de cero hasta un valor que haga que fluya la corriente de ar-
madura de régimen. Mídanse las corrientes de campo y armadura,
así como la potencia de entrada del motor impulsor. Calcúlense las
pérdidas de armadura ]2r y de escobilla para la corriente de arma-
dura estipulada, a partir del valor de resistencia determinado en el
paso 5, haciendo las correcciones por elevación de temperatura de
armadura, como se indicó. Determínense las pérdidas mecánica y
magnética del motor en prueba para la velocidad y corriente de
campo utilizadas con los datos de los pasos 2, 3 y 4. Réstense las
pérdidas ]2 r, las de escobilla mecánica y magnética, de la pérdida](https://image.slidesharecdn.com/308553756-electromecanica-y-maquinas-electricas-nasar-160702045522/85/Electromecanica-y-maquinas-electricas-nasar-228-320.jpg)























![250 La máquina con conmutador para e.e.
FIGURA 5.38 Diagrama de bloques de un motor con excitación constante.
diciones de respuesta enfrecuencia. Se obtienenal factorizar el denominador
de (5.62) y no en forma explícita como las darían las ecuaciones (5.60) y
(5.61). Para aplicaciones de control de posición, puede introducirse la fun-
ción e de posición angular en las ecuaciones (5.56) a (5.59), mediante la
relación !2m = se. La función completa de transferencia del motor se
convierte entonces en
e K,
Va = s[K/+RaD+s(LaD+RaJ)+s2JLa]
(5.63)
Esta misma configuración se usa con frecuencia como generador en
forma de tacómetro o dispositivo detector de velocidad. Dado que la salida
de un generador-tacómetro alimenta generalmente a una carga de alta im-
pedancia, como un voltímetro, pueden ignorarse la resistencia e induc-
tancia de armadura y la función de transferencia se hace, de (5.57):
E
-=Kn s
m
(5.64)
El generador excitado separadamente puede considerarse como un
amplificador y así se usó anteriormente al advenimiento de los dispositivos
FIGURA 5.39 Diagrama de bloques de un motor con entradas múltiples.](https://image.slidesharecdn.com/308553756-electromecanica-y-maquinas-electricas-nasar-160702045522/85/Electromecanica-y-maquinas-electricas-nasar-252-320.jpg)


























![Cálculos de operación de circuitos equivalentes 277
2 r;Pg=I2 S (6.37)
Si se resta la pérdida en rotor I~ r~ de Pg , se obtiene la potencia electro-
magnética desarrollada Pd, de tal suerte que
(6.38)
Esta es la potencia que aparecería en una resistencia que tuviera un valor
óhmico r; [(1 - 8)/S], que correspondería a la carga. La potencia rotatoria
Pr puede restarse de Pd para obtener la potencia de salida de flecha Po.
Así,
(6.39)
Además
(6.40)
y la eficiencia n es la razón Po /Pi'
Se ilustrará este procedimiento, mediante el ejemplo que sigue.
Ejemplo 6.4
Los parámetros del circuito equivalente de la figura 6.17a, para un motor
de inducción, en 220 V, trifásico, 60 Hz, son
"
+--.....-v.A
F,
P,
•
1Il,,-Ipérdida
"" ~ P, - 1,2"
•
(,,)
Pd ~ (1 -s)p" Po
1 1
..
q'í - pérdida p, -pérdida
(b)
FIGURA 6.17 Flujo de potencia en un motor de inducción.](https://image.slidesharecdn.com/308553756-electromecanica-y-maquinas-electricas-nasar-160702045522/85/Electromecanica-y-maquinas-electricas-nasar-279-320.jpg)























































![Transitorios en máquinas sincronas 333
IEje del campo
I
Eje de la fase a
FIGURA 7.25 Máquina trifásica de rotor redondo (sólo la fase a y el devana-
do de campo llevan corrientes).
donde 7 a =X¡/wLad es el coeficiente de fuga de armadura. De igual m me-
ra, para el devanado de campo, se tiene
A¡= (~+ /¡)LaA1+ 7¡) + iaLadsenO
=/¡LaAl +7¡)
Al resolver (7.30) y (7.31) para ia e ir se obtiene
. [(1 + 7¡)senO] /¡
1=
a sen20-(1+7a )(1+7¡)
. (sert-O)/¡
I¡= - sen20- (1 + 7
0
)(1 + 7¡)
(7.31)
(7.32)
(7.33)
Los valores máximos de estas corrientes tienen lugar en e = 1rJ2. En este
caso, se tiene
(7.34)
/
(i) = ¡
f máx 7 + (1 - 7 )7o o ¡
(7.35)
...](https://image.slidesharecdn.com/308553756-electromecanica-y-maquinas-electricas-nasar-160702045522/85/Electromecanica-y-maquinas-electricas-nasar-335-320.jpg)




















![354 Control electrónico de motores eléctricos
Obsérvese que para el pulso diente de sierra con pendiente positiva, se ob-
tendrían las mismas expresiones para los valores rcm y tiempo promedio.
A las formas de onda del tipo expuesto en la tabla 8.1, se les deno-
minará ondas "recortadas". En circuitos de control electrónico de motores,
parte del circuito se energiza durante un lapso pequeño y se desconecta
mediante un dispositivo de conmutación de estado sólido en un intervalo
reducido, repitiéndose en seguida este proceso. En muchos circuitos, el pul-
so presente es de forma regular o puede tomarse casi con tal. En casos así, se
dispone de expresiones generales para los valores eficaz y medio:
(8.2)
(8.3)
En estas expresiones, Kf y KA son factores que dependen sólo de la forma
del pulso. Por ejemplo, para un pulso seno Kf = 1/2, KA = 2/rr; en uno
triangular, Kf = 1/3, KA = 1/2 yen uno cuadrado, Kf = KA = 1.
Ejemplo 8.2
Encontrar los valores tiempo promedio, media onda promedio y eficaz de
la forma de onda del renglón 1 en la tabla 8.1, si cada pulso alterno es ne-
gativo.
De la ecuación (8.2), el valor eficaz es
El promedio onda media, partiendo de la ecuación (1.8) es
AHWA = ; lTPsenwt= ; iT~en2'7T( 2~' )tp o p o o
=.1.. To [_cos~t]TO= eto .1
Tp '7T To o. ~ '7T
El tiempo promedio para un período es cero:
Aav=O](https://image.slidesharecdn.com/308553756-electromecanica-y-maquinas-electricas-nasar-160702045522/85/Electromecanica-y-maquinas-electricas-nasar-356-320.jpg)





















![376 Control electrónico de motores eléctricos
tao La corriente fluye de la fuente a través de la carga y del capacitor de
conmutación y puede describirse, durante este intervalo, por la ecuación
diferencial de un circuito serie RLC:
(8.4)
La solución para la corriente i 1
es, para el caso subamortiguado (L/C n
R 2
/4),
(8.5)
donde
E = Eb - Eeo
Veo =es el voltaje del capacitor para un tiempo t =O; Veo es positivo
cuando la placa superior de C en la figura 8.8 es positiva res-
pecto a la inferior;
Zo = VL/C-(R/2i ,es la impedancia característica de Ohms;
10 = corriente para t = O
a = R/2L, es la constante de atenuación, 8-1
•
f3 = VI/LC-(R/2L)2 =Zo/L, constante de fase en rad/seg.
La solución para el voltaje a través del condensador es
donde
v = E - 1 R e- al [sen( f3t +€ +e) ]
e b lO o sen e
Zj=E/110 =impedancia de carga
sene=Zo/yZ/-RZj+(L/C) ; e=tan- I
Zo/(Zj-R/2)
sen € = Zo/YL/ C ; € = tan-le f3/ a)=tan-1(2Zo/R)
La solución para el voltaje de carga (a través de R y L) es
(8.6)
(8.7)](https://image.slidesharecdn.com/308553756-electromecanica-y-maquinas-electricas-nasar-160702045522/85/Electromecanica-y-maquinas-electricas-nasar-378-320.jpg)








![Encendido de circuito de base y de compuerta 385
Obsérvese que este pulso es angosto con corriente pico elevada, lo que es
característico de los pulsos de corriente requeridos en este tipo de circui-
tos. El tiempo de apagado o de conmutación de circuito (tiempo después
de haberse encendido 82 ) es, en este caso, el tiempo durante el cual el vol-
taje en el capacitor es aún mayor que el de la fuente, con el objeto de
mantener una polarización inversa en 82 • Puede determinarse haciendo a
Ve igual a 72 V en la ecuación (8.9) y resolviendo para el tiempo. Notar
que en los cálculos del circuito de inversión, Eb es cero.
180 . I 1T )
72 = O- T.O (I.O)sen, f3tQ + 2'
Al resolver para tQ se tiene
f3tQ =66.4° = l.l4 rad; l.l4 51tQ = = us
2.24 X l(f I
Este valor es adecuado para muchos tipos de SCRs en este intervalo de po-
tencias.
Ejemplo 8.6
Si se supone que no existe demora en el encendido de los SCRs del ejem-
plo 8.4, determinar la corriente eficaz en el condesandor.
La forma de onda de corriente en el condensador tiene las caracterís-
ticas que se ilustran en la figura 8.11. Para determinar el valor eficaz de
corriente, puede usarse la tabla 8.1:
1. Por
[
353 ] = 105 A
2(353+ 141)
2. Por
[
141 ] = 152 A
2(353 + 141)
3. Valor eficaz de corriente en C= 'V105
2
+ 152
2
= 185 A
8.5 TECNICAS DE ENCENDIDO DE CIRCUITO DE BASE Y DE
COMPUERTA
Las posibilidades de control de los thyristores y de los transistores de poten-
cia proceden de su capacidad para pasar de un estado de alta impedancia a
uno de muy baja, en un lapso sumamente pequeño. Esta acción, a la que
se llama encendido del dispositivo, se inicia mediante la terminal de com-
puerta en los thyristores y por la conexión de base en el transitor de emi-](https://image.slidesharecdn.com/308553756-electromecanica-y-maquinas-electricas-nasar-160702045522/85/Electromecanica-y-maquinas-electricas-nasar-387-320.jpg)






















![408 Control electrónico de motores eléctricos
con una fuente de potencia de 120 V, 60 Hz. El motor tiene una resistencia
de armadura de 0.1 Ohm y una inductancia de armadura de 1 mHy. La ar-
madura está en paralelo con un diodo de rueda libre. El motor opera a una
velocidad constante, de tal suerte que la fcem de armadura es de 60 V. En
un cierto instante, cuando un SeR se enciende (Tex. =0.006 seg) la corrien-
te de armadura es de 80 A. Determinar
a) El valor de la corriente de armadura para el tiempo TI cuando co-
mienza la corriente de rueda libre y se apaga el SeR.
b) La corriente al finalizar el segmento de corriente de rueda libre.
Vm para una fuente de 120 V. rcm es169.7 V; Z=yO.12
+(377X.OOlf =
0.39 L 75.2°. </>=75.2° = 1.3125 rad; VmsenwTI =60; wTI= '17-60jI69.7=
2.786=; wT,,377xO.OO3=1.l31 rad; To=(lj2)(lj60)=0.OO833 s; wTo = '17;
r=O.OOljO.1 =0.01 s. i(Ti)
De (8.30),
i(TI )
= 1690~3~60 {sen(2.786-1.3125) -exp[ - (0.OO8¿.~tOO3 ) ]sen 1.131-1.3125) }
+80exp[ - ( 0.OO8¿.~tOO3 ) ]
= 281.3[0.995 - 0.586( - 0.1805) ] + 80 X0.586
= 356 A al término del primer segmento. (a)
El segmento de rueda libre continúa hasta que se encienda el siguien-
te SeR, lo que tiene lugar Tex. seg después del cruce por cero del voltaje de
entrada. Por lo tanto, la corriente de rueda libre para Tex. seg es, de (8.35),
iFW (TJ=356exp( -O~;) - g.~ [I-exp( - 00~; )]
=264-155.5= 108.5 A (b)
Ejemplo 8.11
La figura 8.26 ilustra una corriente de carga en régimen estacionario en
una armadura de motor en paralelo con un diodo de rueda libre. Se utiliza-](https://image.slidesharecdn.com/308553756-electromecanica-y-maquinas-electricas-nasar-160702045522/85/Electromecanica-y-maquinas-electricas-nasar-410-320.jpg)





























![438 Teoría general de máquinas eléctricas
Considérese un área elemental ~s, a través de la cual pasa un flujo ~<P
(en la dirección - r), luego:
La permeancia de esta trayectoria de flujo es
!.ls!.lP= l i -
t"'o g
(9.10)
(9.11)
Si Ni es la fuerza magnetomotriz resultante, el flujo ~<P se obtiene en-
tonces también como
!.l</> =N¡!.lP =11 N¡ !.lst"'0 g (9.12)
Al igual la ecuación (9.10) con la (9.13) se tendrá
(9.13)
También se podría verificar la ecuación (9.13) por el hecho de que la caí-
da de fmm N. se tiene sólo a través del entrehierro g, siendo J.lh mucho ma-
yor a /10' En' seguida Ni se determina por la adición fasor de las fmms de
estator y rotor, de donde, el valor máximfj de la fmm resultante es
(Ni)2= (k SN S¡s)2+(k'N'¡' l +2kSk'NW'¡S¡'senOo (9.14)
En las ecuaciones (9.13) y (9.14) se observa que el valor máximo de H r ,
cuando el devanado de rotor está desplazado por () o del estator, es tal que
(H')~áX= ~ [(kSN S¡s)2+(k'N,¡,)2 +2ksk'NSN'¡S¡'senf)0]
g
(9.15)
y Hr varía sinusoidalmente con (). El valor promedio de (Hr)2 es simple-
mente [(Hr)2 máx ]/2 y la energía magnética Wm almacenada en el en-
trehierro es
1 2 llo7Trlg 2
Wm = ¡ /lo(H,)máx(volumen de entrehierro) = -2-(H,)máx (9.16)
Según las inductancias, la misma energía puede expresarse como
(9.17)](https://image.slidesharecdn.com/308553756-electromecanica-y-maquinas-electricas-nasar-160702045522/85/Electromecanica-y-maquinas-electricas-nasar-440-320.jpg)
![Determinación de las inductancias de máquina 439
Pero las ecuaciones (9.15) y (9.16) dan
Al comparar las ecuaciones (9.17) y (9.18) se obtienen las inductancias
buscadas como
(9.l9a)
11. 7Trl
Lrr= _r_o_(k rN r)2= L'
g
(9.l9b)
/Lo7Trl
L sr = --kskrNSNrsen(} = LS"sen(}
g o o
(9.l9c)
Hasta aquí, se ha tomado en cuenta un sólo devanado en el estator y
uno en el rotor; en una máquina de dos fases, se tienen dos devanados en
cada miembro. Los dos del estator son idénticos y mutuamente perpendi-
culares, por lo que están desacoplados magnéticamente. Lo mismo sucede
con los del rotor, como se muestra en la figura 9.2. En este caso, las induc-
tancias de estator y rotor, expresadas como matrices, son
y
t] (9.20)
Las inductancias mutuas estator-a-rotor se pueden obtener de la ecuación
(9.19). Así,
L sr ] [ L sr cos()ab _ o
L sr - L sr sen(}bb O
- LsrsenOo ]
L srcos(}o
(9.21)
En la ecuación (9.21), los subíndices en las letras L corresponden a las fases
(a y b) Ylos índices superiores se usan para denotar estator o rotor (8 o r).
Así, por ejemplo, L~rb es la inductancia mutua entre la fase a del estator
y la b del rotor. Los elementos de la matriz en la ecuación (9.21) se obtie-
nen de la ecuación (9.19c), haciendo 00 =(90 - O) para V&a, 0= 90 + O
para Lsr
ab y así sucesivamente. La matriz total L para la máquina de dos
fases es, por lo tanto,
(9.22)](https://image.slidesharecdn.com/308553756-electromecanica-y-maquinas-electricas-nasar-160702045522/85/Electromecanica-y-maquinas-electricas-nasar-441-320.jpg)


![442 Teoría general de máquinas eléctricas
El flujo que eslabona con la fase a, proveniente de la corrientei: ' es
(9.28)
Al combinar las ecuaciones de la (9.26) a la (9.28) se obtiene
(9.29)
o sea
(9.30)
dondeLs =+(kSNs)2 (Pd + Pq) y L~ =-{-(KSNS) (Pd -Pq). Sustituyendo
e=e + rr/2 en la ecuación (9.30) resulta
Lt,b = Ls- Lócos20
Para determinar las inductancias mutuas, recuérdese que
"Ass
Lss=Lss = -E!!..ab ba ¡;
(9.31)
(9.32)
El flujo "sb
s
que eslabona con la fase b, que resulta de la corriente is en laa a
fase a, se encuentra en la ecuación (9.27) y (9.28), haciendo e=e+ rr/2,
de tal suerte que
"A;t= kSN
S
[<PdaCOS(O+ Í)-<P:asen(0+ Í)] (9.33)
Si se sustituyen las ecuaciones (9.26) y (9.27) en la (9.32) se tendrá
"A;t = (kSNS)2¡;[PdcosOcos(0+ ;) +PqSeIlOSe~0+ Í)]
la que, al sustituirse en la ecuación (9.32) y al simplificarse, conduce a
(9.34)
donde L'b se ha definido junto con la ecuación (9.30).
En notación matricial, la matriz L de una máquina eon rotor saliente
de dos polos es
r
Ls+ Los cos20 - Lossen20 : LsrcosO 1
L = _-_Lris=n!~ __ ~s___Lri~o~2~ L~ ~s:~~n~
Lsrcoso - Lsrseno ¡ L¡
(9.35)](https://image.slidesharecdn.com/308553756-electromecanica-y-maquinas-electricas-nasar-160702045522/85/Electromecanica-y-maquinas-electricas-nasar-444-320.jpg)


![Máquina con protuberancia en el estator 445
Ahora, ya se tienen las matrices-L para las tres formas básicas de las
máquinas eléctricas. Estas inductancias pueden sustituirse en las ecuacio-
nes de movimiento para obtener las características de máquina, como se
verá más adelante.
9.3 MAQUINA CON PROTUBERANCIA EN EL ESTATOR
La ecuación de balance de voltaje puede escribirse en forma matricial como
v=ri +p(Li) (9.43)
donde p =~Desarrollando el último término de la ecuación (9.43), se tiene
dt
p(Li)=Lpi+(pL)i=Lpi+ d~ Lwmi
o
(9.44)
=(Lp+wmG)i
donde
deo dL
W m =---= velocidad mecánica del rotor =G =-
dt deo
La sustitución de la ecuación (9.44) en la (9.43) da
v= (r+ Lp +wmG)i (9.45)
El último término de la ecuación (9.45) proviene de la rotación y algunas
veces se le llama voltaje rotacional.
En seguida, considerando la ecuación de torque, se tiene
= -1 - 1= -1 1T I,:, [ aL]" 1':'G"
e 2 aoo 2
(9.46)
De esta manera, las ecuaciones (9.45) y (9.46) son las ecuaciones generales
de movimiento para una máquina con protuberancia en el estator.
A fin de obtener las ecuaciones de movimientos de una máquina de c.
c., a partir de las ecuaciones generales anteriores, se hará referencia a la fi-
gura 9.5. Se recordará que en el capítulo 5 se menciona que las escobillas
se localizan en el eje q. La existencia de escobillas hace que el devanado de
armadura (o rotor) aparezca estacionario en el espacio (respecto al estator),
cuando menos por lo que toca al eje q, aunque en realidad los conductores
de armadura están girando. Puesto que el flujo de rotor es estacionario, no](https://image.slidesharecdn.com/308553756-electromecanica-y-maquinas-electricas-nasar-160702045522/85/Electromecanica-y-maquinas-electricas-nasar-447-320.jpg)



![Máquina con protuberancia en el rotor 449
Eje de la
fase a
Eje q
tPb
Eje de la
fase b
FIGURA 9.7 La transformación ab a dq en una máquina de rotor saliente.
va. Para asegurar la equivalencia entre las bobinas originales de estator y las
ficticias sobre el rotor, los campos del entrehierro deben permanecer inva-
riantes. Es decir: la fmm producida por las nuevas bobinas en el rotor, debe
ser igual a la producida por las bobinas originales del estator. Sin olvidar
lo anterior, véase la figura 9.7, que muestra una máquina con polo saliente
con bobinas de estator y rotor originales, así como las nuevas d y q, respec-
tivamente, colocadas a lo largo de estos ejes. Las corrientes en las diversas
bobinas y sus vueltas son las indicadas en esta figura. Se supondrá que el
rotor no está excitado, pues se desean encontrar las condiciones de equi-
valencia entre las bobinas originales ab del estator y las nuevas dq sobre el
rotor. Descomponiendo las fmms a lo largo de los ejes d y q, se obtiene
Fd = Ndid =N(ia cosO + itsenO)
Fq = Nqiq = N( - iasenO +ib cosO)
(9.55)
Puesto que las bobinas N d y N q son ficticias, se pueden seleccionar
Nd = Nq =N Y expresar la ecuación (9.55) en forma matricial como
r
l
~d ] = [ cosO
lq -sen9
seno] [ ~a ]
cosO lb
(9.56)](https://image.slidesharecdn.com/308553756-electromecanica-y-maquinas-electricas-nasar-160702045522/85/Electromecanica-y-maquinas-electricas-nasar-451-320.jpg)

![Máquina con protuberancia en el rotor 451
y
-1 -
Sdq =Sdq
La sustitución de la ecuación (9.61) en las ecuaciones (9.1) y (9.2) da
las ecuaciones de movimiento, en función de las variables transformadas:
(9.63a)
(9.63b)
Para desarrollar estas ecuaciones, analicese el segundo término
S,/qp(LSdqidq )= S,/ql [ ( ~~ O )Sdqidq +L :0(Sdq)Oidq +LSdq(pidq )]
= [S,/ql ~~ Sdq +S,/qIL :0(Sdq) ]Oidq +(S,/qILSdq)pidq
= {S,/ql[ :0(LSdq )]0+(S;/LSdq)p }idq (9.64)
Al sustituir la ecuación (9.35) en la (9.62) se obtiene, después de simplificar
(9.65)
donde Ld = Ls + L~ V Lq =Ls - L~. De donde, con las ecuaciones (9.63a),
(~.60b) y (9.65) se obtiene
(9.66)
y
T =i si s(L -L )+i si L sr
e dq d q qf (9.67)
Nótese que se eliminó la dependencia angular en las ecuaciones de
movimiento y para operación a velocidad constante, la ecuación (9.60)](https://image.slidesharecdn.com/308553756-electromecanica-y-maquinas-electricas-nasar-160702045522/85/Electromecanica-y-maquinas-electricas-nasar-453-320.jpg)
![452 Teoría general de máquinas eléctricas
es un conjunto de ecuaciones diferenciales lineales con coeficientes cons-
tantes. De esta ecuaciones se pueden obtener las características de una
máquina de rotor saliente, por ejemplo un generador síncrono de polo sa-
liente o un motor.
Conviene destacar que puesto que una máquina de rotor redondo es
un caso especial de una máquina de polo saliente, en la que se anulan los
efectos de protuberancia, la transformación es también aplicable a la má-
quina de rotor redondo. Esto es, un motor de inducción de dos fases pue-
de analizarse mediante esa transformación (ver problema 9.5).
9.6 OTRAS TRANSFORMACIONES ESPECIALES
Anteriormente se observó que las soluciones analíticas de las ecuaciones de
movimiento no son inmediatas. Las soluciones explícitas sólo se podrían
obtener mediante la transformación dq para eliminar la dependencia dq en
las ecuaciones. A pesar de que fuera posible obtener el circuito equivalente
del motor de inducción en estado de régimen, las soluciones directas de las
ecuaciones de movimiento no se determinan fácilmente en condiciones
transitorias. Un método alterno a la transformación dq para obtener las
características dinámicas de una máquina de rotor redondo es usar las trans-
formaciones de componentes simétricas (+ -) y la progresiva-regresiva
(fb: forward-backward). Dado que existE' una base matemática para estas
transformaciones,1 aquí se usan en calHad de definiciones. La matriz que
define a la transformación + - para un¡ máquina de dos polos es
8 =_1_[ 1.+- v'2 -J ~] (9.68)
y
8- 1 =S* =_1_[1+- +- v'2 1 -;] (9.69)
donde ~ denota la transpuesta,* el complejo conjugado y -1 el inverso
de una matriz. Las relaciones entre las cantidades originales (sin acentos)
y las transformadas (con acentos) son
y (9.70)
v=8+ _Vi
Para aplicar esta transformación a una máquina de dos fases cuya ma-
triz-L la den las ~cuaciones (9.20) y (9.21), se sustituyen éstas y las ecua-](https://image.slidesharecdn.com/308553756-electromecanica-y-maquinas-electricas-nasar-160702045522/85/Electromecanica-y-maquinas-electricas-nasar-454-320.jpg)


![Otras transformaciones especiales 455
v;=v¡;= vJ =v¡;=0 (9.78)
Con las ecuaciones (9.68), (9.70) Y (9.77), se obtiene
V S = _1_ [( VS +jVS)e}wI +(Vs* +jVs*)e-Jw1 ]
+ 2Y2 a b a b
(9.79)
v~ = 2~ [(V;-jVneiwI+(V;*-jVb*)e-JwI]
donde
V;= V;
(9.80)
vt = - jvtei<P
y el asterisco indica el complejo conjugado, en estado de régimen
VS
= _1_(vs +J'VS
)
+ Y2 a b
(9.81)
VS
= _1_(vs_J'V/)
- Y2 a b
Mediante la ecuación (9.81), la (9.79) puede expresarse como
vS = l( VSeiW1 + VS*e-Jw1)+ 2 + -
(9.82)
v~=v~
Asimismo, la ecuación para las corrientes en estado del régimen, puede
escribirse
.r-l(Ir~jWI+lr* -}WI)lf - 2 f~ be
(9.83)
'r . r*
lb =lf
En la ecuación (9.79) se observa que es posible resolver el voltaje en dos
componentes: V~eiWI y V~e-JwI. En consecuencia, cuando se intro- "'
,',',
,.,](https://image.slidesharecdn.com/308553756-electromecanica-y-maquinas-electricas-nasar-160702045522/85/Electromecanica-y-maquinas-electricas-nasar-457-320.jpg)
![_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _......_ _ _ _ _ _ _I""nl!lliil""'reff~~~'":"·"
456 Teoria general de máquinas eléctricas
ducen las ecuaciones (9.79) a (9.83) en la (9.71), se tiene para una veloci-
dad de rotor wm y una excitación Vs ejWt
+
v~ =(r S+jwU)/~ +jwLsrlí
(9.84)
Para una excitación VS '!:. e -jWt se tendría
V~O = (rS-jwLs)/~O - jwLsrlr
(9.85)
Pero (w - wm ) =sw y (w + wm ) =(2 - S) w, donde s es el deslizamiento,
por lo que las ecuaciones (9.84) y (9.85) pueden reescribirse en su forma
final en función de voltajes y corrientes no conjugadas de la manera siguiente:
v~ = (rS+jwLS)I'r +jwLsrlí
(9.86)
y
V~ =(rS+jwU)/~ +jwLsrl;
(9.87)
Estos dos conjuntos de ecuaciones dan las características volt-amperio del
motor. De manera semejante, es posible expresar la ecuación de par (9.76)
mediante la (9.83):
T =! Lsr[(lsOlr_ls IrO)+(ls I ro_lsOlr)e 41 +1 +1 -b -b
+ (Is ¡r - I Sr)e-i2w1 +(lsOlrO - ISoIrO)e -J2WI]
-1 +b +b-1 (9.88)
Al resolver las ecuaciones (9.86) y (9.87) para las corrientes, haciendo la
sustitución en la ecuación (9.89) y observando que el valor promedio de
e±j2wt es cero, se obtiene la expresión para el par promedio como](https://image.slidesharecdn.com/308553756-electromecanica-y-maquinas-electricas-nasar-160702045522/85/Electromecanica-y-maquinas-electricas-nasar-458-320.jpg)
![Otras transformaciones especiales 457
(~)W(Lsr)2: (V~)2
Tav =-------------------------------------
(9.89)
---W2[L'U-(L sr )2] +W2 rSLr+_r_Lr
{
rrrs }2 ( r)2
2-s 2-s
En la figura 9.9 se da un resumen de la transformación de dos fases
discutida hasta aquÍ. Los superiores -1, * y ~ denotan las matrices inver-
sa, conjugada compleja y transpuesta, respectivamente.
Observese el siguiente ejemplo para ilustrar la aplicación de lo ante-
rior.
Ejemplo 9.1
Un servomotor de dos fases, dos polos, en 400 Hz, tiene las siguientes cons-
tantes de circuito (por fase):
rS
=50 ohm wLs=610 ohm
,r=430 ohm wL'=460 ohm
y wLsr =380 ohm
Calcular el par en estado de régimen para una velocidad de 6000 rpm, si las
dos fases se excitan con voltajes va = 230 LO° Y vb = 115 L -90
0
Con estos datos se tiene
n = 120 x 400 =24000 rpm
s 2 '
= 24,000-6000 =075
s 24000 .,
w=2?TX400=2513 r/s
Con la ecuación (9.81) se obtiene
v~ = _1_ [230+j( -jI 15)] =244 V
V2](https://image.slidesharecdn.com/308553756-electromecanica-y-maquinas-electricas-nasar-160702045522/85/Electromecanica-y-maquinas-electricas-nasar-459-320.jpg)
![458 Teoría general de máquinas eléctricas
s+ _
o ~O'-~-E~----------------S;~
S-l
dq
o ~0
~-E~----------------~S;~
- 1[1 lJS+_ - ';2 -j j ,
s -[cos e sen e], Sd-
q
1 = Sdq
dq - -sen e cos e
FIGURA 9.9 Resumen de transformaciones de dos fases.
V~ = _1_ [230-¡( -¡liS)] =81.3 V
V2
Al sustituir los valores numéricos anteriores y los datos en la ecuación (9.89)
se obtiene
9.7 NOTA ACERCA DE LAS TRANSFORMACIONES DE TRES FASES
Hasta ahora, en las discusiones, por lo general se ha hecho referencia a
máquinas de dos fases; no obstante, se sabe que la mayoría de las máquinas
industriales de c.a., son trifásicas. Por lógica, es necesario saber si los méto-
dos desarrollados hasta aquí son aplicables también a tales máquinas.
Los principios que sustentan a los análisis de las secciones precedentes
también son aplicables a las máquinas trifásicas o multifásicas, y no son pri-
vativos de las de dos fases. Por ejemplo, puede demostrarse que en ciertas
condiciones una máquina polifásica puede reducirse a una equivalente de](https://image.slidesharecdn.com/308553756-electromecanica-y-maquinas-electricas-nasar-160702045522/85/Electromecanica-y-maquinas-electricas-nasar-460-320.jpg)


![La formulación en el dominio del tiempo 461
Esta ecuación también puede escribirse como
(9.92)
donde la matriz-G, que contiene los coeficientes de voltaje dependientes
de la velocidad, es simplemente
G = [- ~- - - ~- i-~---~-]O -LrsIO -Lrqq q
L sr O I L r Odd I d
(9.93)
De donde, la ecuación del par es
(9.94)
Como puede verse en la ecuación (9.3), estas ecuaciones son semejan-
tes a las de máquinas estudiadas con anterioridad. Se concluye así, que la
máquina primitiva es una máquina general de la que pueden derivarse o",ras
si se aplican las restricciones adecuadas. En vista de que la máquina pr mi-
tiva ya casi no tiene importancia práctica, ya no se tocará el tema. E' l las
referencias bibliográficas 2 a 6 hay detalles al respecto. Ahora, se procede-
rá a ver las aplicaciones de computadora digital para obtener directamente
soluciones a las ecuaciones de movimiento.
9.9 LA FORMULACION EN EL DOMINIO DEL TIEMPO
Se recordará que la ecuaciones de voltaje y par de una máquina eléctrica
pueden escribirse rutinariamente como (9.1) y (9.2), repetidas aquí para
mayor facilidad
v=ri+ ~(Li)
dt
T 1-; a (L·)
e= -"21 ao 1
(9.95)
(9.96)
Las características de ejecución de la máquina se obtienen resolviendo es-
tas ecuaciones. Al respecto, en las discusiones de las últimas secciones se
observa que la teoría generalizada de máquinas intenta resolver estas ecua-
ciones mediante un método de transformación. Mientras que el método de
transformación (como la dq o la + -) facilita la solución de las ecuaciones
de movimiento, es aplicable sólo cuando la máquina se idealiza y sus matri-
ces de inductancia cumplen ciertos requisitos. Hay muchos ejemplos en los](https://image.slidesharecdn.com/308553756-electromecanica-y-maquinas-electricas-nasar-160702045522/85/Electromecanica-y-maquinas-electricas-nasar-463-320.jpg)




![466 Teoría general de máquinas eléctricas
Al igual que en el capítulo 4, considérese al motor de inducción como
un conversor de energía electromecánica con devanado múltiple. Usando
la notación de la sección 4.7, las ecuaciones de movimiento pueden escri-
birse en forma matricial como sigue
v=ri+ ~(Li)dt
T P: aL. J' b
e = TI ao1= Wm + Wm +e
(9.100)
(9.101)
donde Tdenota la transpuesta de i, el resto de los símbolos se definirán pos-
teriormente. A fin de obtener la solución para el par transitorio, por ejem-
plo, deben conocerse las corrientes de estator y rotor, que se obtienen de la
ecuación (9.100) y se sustituyen en la ecuación (9.101).
En virutud de que las ecuaciones anteriores son no lineales con coefi-
cientes variables en el tiempo, se resuelven numéricamente como en el úl-
timo ejemplo. Para ello, conviene expresar las ecuaciones de movimiento
en forma de variables de estado. Para las ecuaciones (9.100) y (9.101) se
tiene, por lo tanto,
que pueden combinarse para obtener
x=Ax+Bv'
donde los diversos vectores son
y
A=
.-[~;1
v'= [r1
r
L- 1
B= O
O
o
e
J
O
-L-I(r+ ~~)
~ [F(i)]
O
~l
O
b
J
O
O
O
O
(9.102)
(9.103)
(9.104)
(9.105)
(9.106)
(9.107)](https://image.slidesharecdn.com/308553756-electromecanica-y-maquinas-electricas-nasar-160702045522/85/Electromecanica-y-maquinas-electricas-nasar-468-320.jpg)

![468 Teoría general de máquinas eléctricas
0.063 n 0.148 n 0.148 n
0.083 n
s
FIGURA 9.14 Un circuito equivalente aproximado para un motor de inducción.
Para ilustrar el procedimiento, considérese un motor conectado en Y, en
60 Hz, cuatro polos, 220 V, 30 hp, con un circuito equivalente por fase
como el de la figura 9.14. El par de carga total del motor es (0.06 wm +
0.03 w m + 6) N-m, donde w m es la velocidad del rotor en radjseg. Las
características de aceleración se estudiarán cuando las terminales de esta-
tor se conectan repentinamente a una alimentación trifásica 220-V.
Las ecuaciones (9.10) y (9.11) se pueden reescribir en forma desarro-
llada como
[
v'] = [ r' +pL
ss
v" pLrs
pL
sr
][ ¡S]
rr +pLrr ¡r (9.108)
T - P ['s.r] a [LSS
- - 11 -
e 2 a(} Lrs
Lsr ][ ¡S ]
Lrr ir (9.109)
donde p = djdt, los índices superiores r y s corresponden a magnitudes de
estator y rotor, respectivamente. Para el caso que se analiza, las diversas
submatrices son
con <p =21fj3.
[
.063
r S
= O
O
v'= 180cos(377t-cj» ;v"= O
[
180cos377t 1 [O]
O
0.063
O
180cos(377t+cj» O
~ 1ohrn;rr= [.Og3
0.063 O
O
0.083
O
(9.110)
~ ]ohrn(9.111)
0.083
LSS = Lrr = - 10.0 20.3925
[
20.3925 -10.0
-10.0 rnH
-10.0 ]
(9.112)
-10.0 -10.0 20.3925
[
20cos(}
Lsr
= 20cos((}-cj»
20cos(() +cj»
20cos(() + cj»
20cos(}
20cos(() -cj»
20cos«(}-cj» 1
20cos«(}+ cj» mH
20cos(}
(9.113)](https://image.slidesharecdn.com/308553756-electromecanica-y-maquinas-electricas-nasar-160702045522/85/Electromecanica-y-maquinas-electricas-nasar-470-320.jpg)

























Este documento presenta información sobre un libro de electromecánica y máquinas eléctricas. El libro fue traducido al español y revisado por ingenieros mexicanos. Contiene prólogos de los autores originales en inglés y del traductor. El contenido cubre temas como circuitos magnéticos, transformadores, máquinas de corriente continua y máquinas rotatorias.














































































