Este documento describe el funcionamiento de un PLC Siemens S7-1200. La CPU lee los valores de entrada antes de ejecutar el programa y almacena los valores en la memoria de proceso de entradas. Luego, ejecuta la lógica del programa y actualiza los valores de salida en la memoria de proceso de salidas. Finalmente, escribe los valores de salida resultantes en las salidas físicas.






















































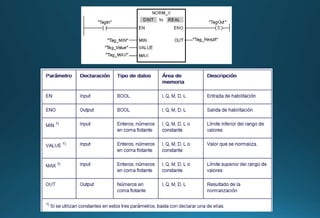
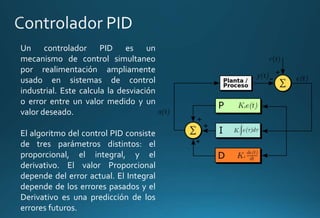
![La instrucción "Escalar" utiliza la
siguiente ecuación:
OUT = [VALUE ∗ (MAX – MIN)] + MIN](https://image.slidesharecdn.com/cursos7-1200-230227055629-9ee3f883/85/CURSO-S7-1200-pptx-63-320.jpg)