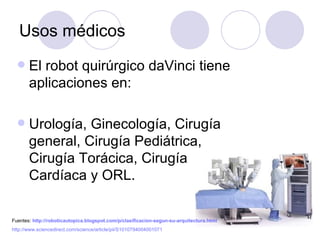
Este documento resume la evolución de la robótica, desde sus inicios como máquinas programadas para realizar tareas repetitivas, difíciles o peligrosas en lugar de los humanos, hasta los robots más avanzados de hoy en día. Explica que los primeros robots se usaron para manipular materiales radiactivos y que el Unimate fue el primer robot industrial programable. También describe algunos tipos de robots como los poliarticulados, móviles y androides, así como usos actuales en cirugía y exploración espacial.