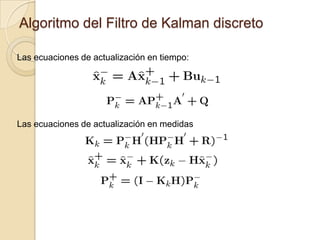
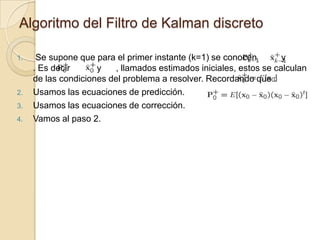
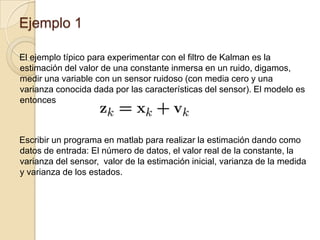
El documento introduce el filtro de Kalman, desarrollado por Rudolf Kalman en los años 50. Explica que es un algoritmo óptimo recursivo para procesar datos de sistemas dinámicos lineales sometidos a ruido. Describe cómo el filtro de Kalman estima el estado de un sistema usando medidas ruidosas de forma recursiva, actualizando la estimación a medida que se obtienen nuevas medidas. Finalmente, presenta un ejemplo simple de aplicación del filtro de Kalman para estimar una constante a partir de medidas ruidosas de un sensor.
![DefiniciónUn algoritmo optimo recursivo para procesamiento de datos [Maybeck79].Usado para la estimación eficiente del estado de un proceso.Optimalestimate of systemstatesUso común de filtro de Kalman](https://image.slidesharecdn.com/kalman-100531091805-phpapp01/85/Kalman-3-320.jpg)