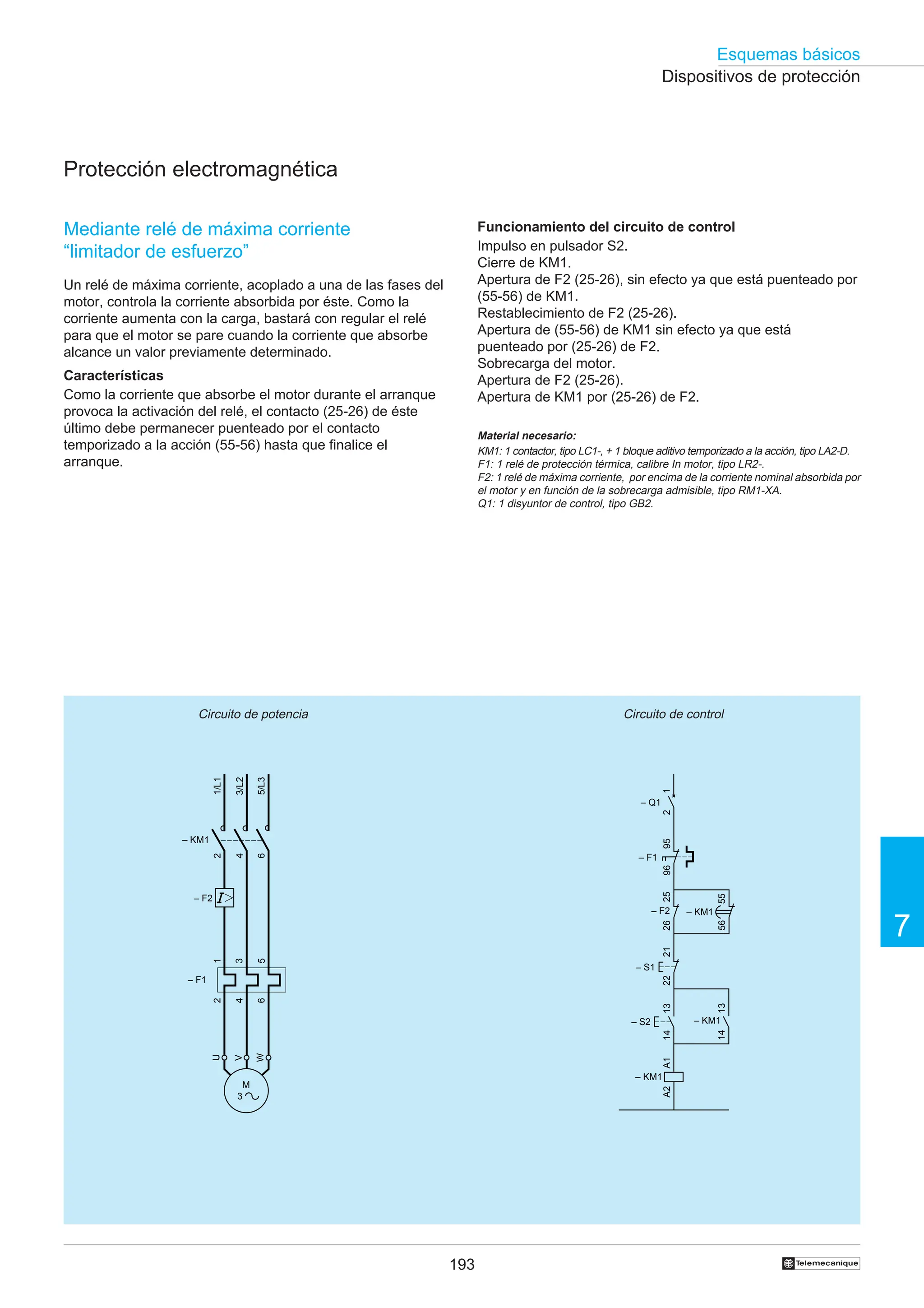
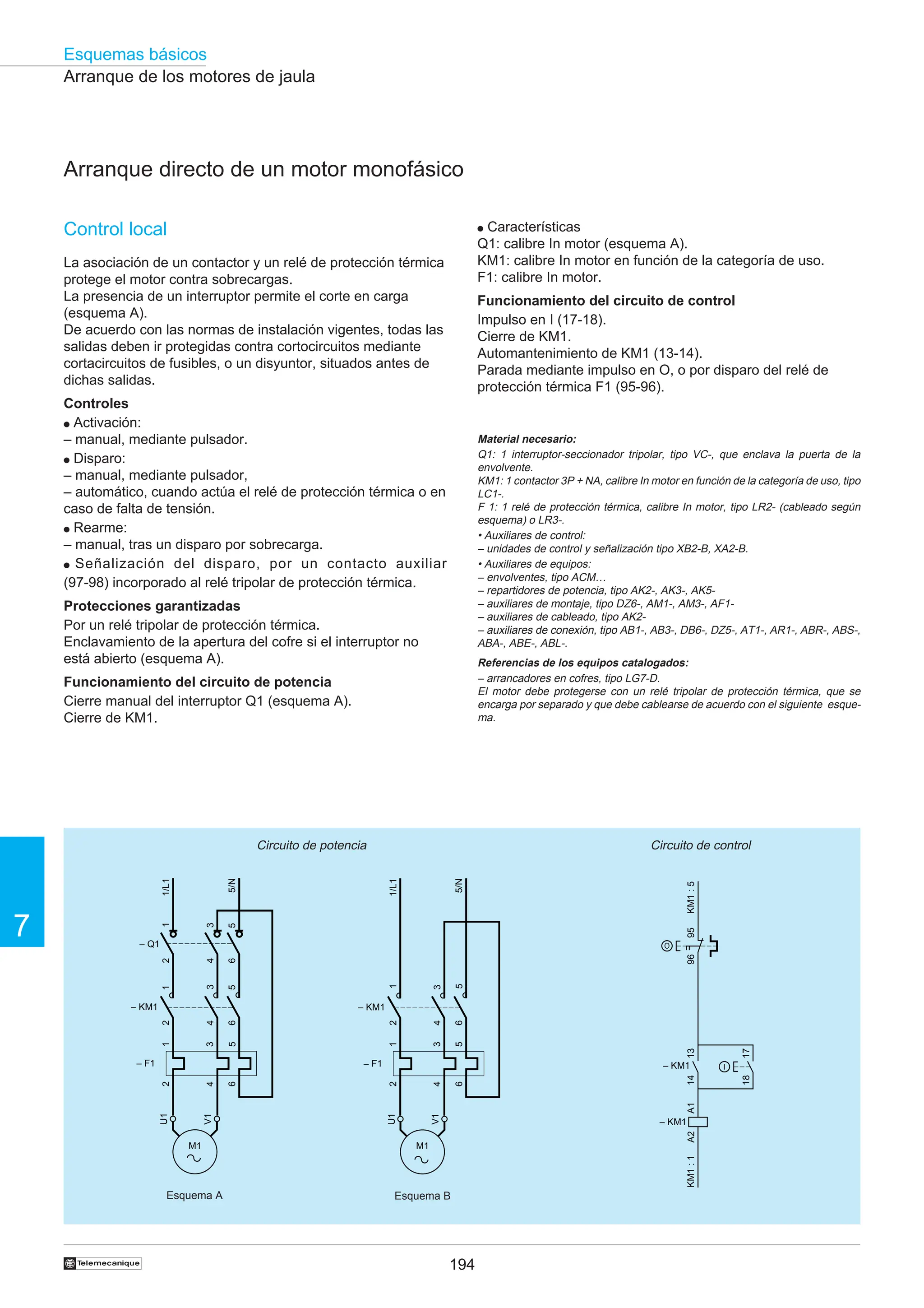
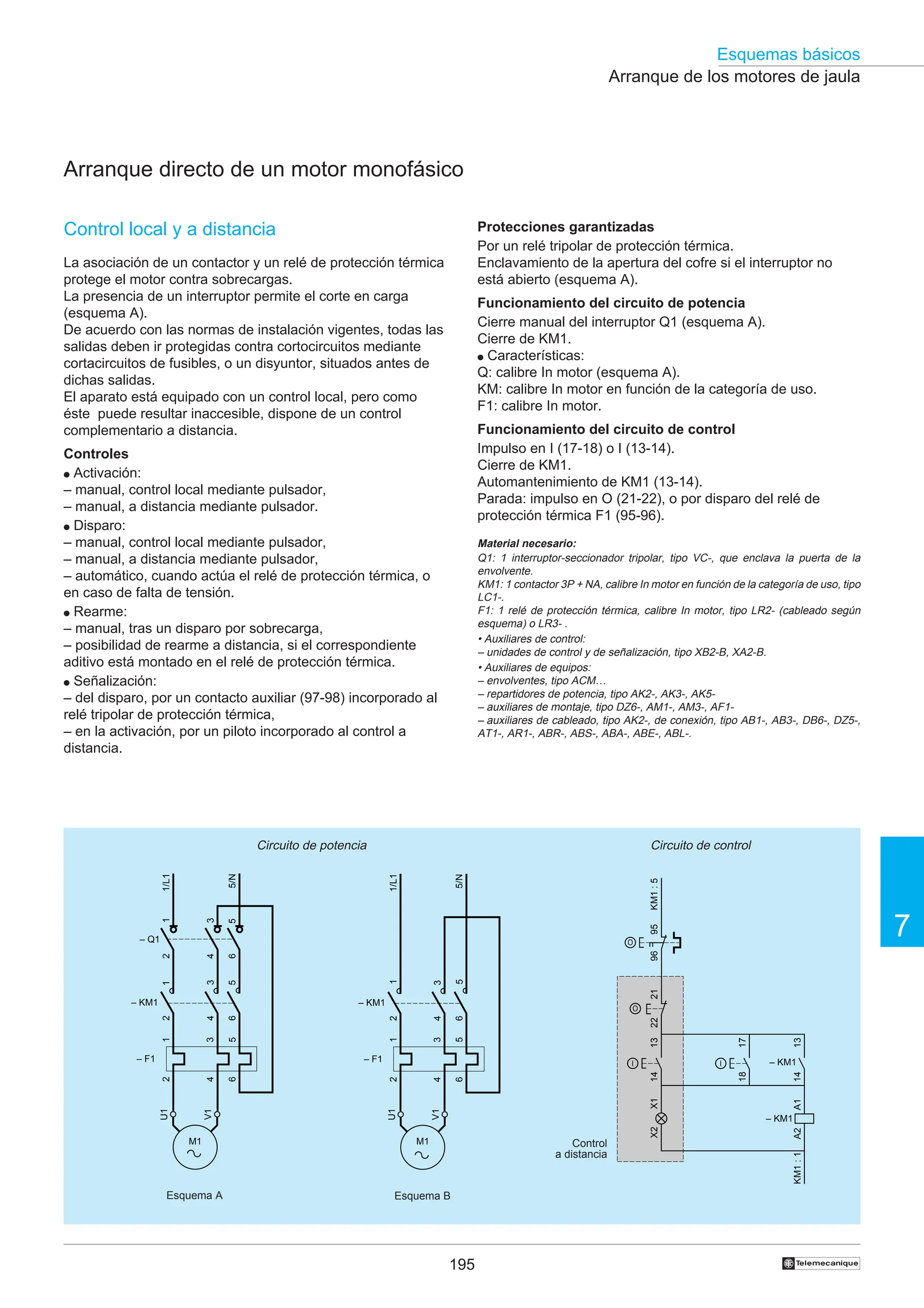
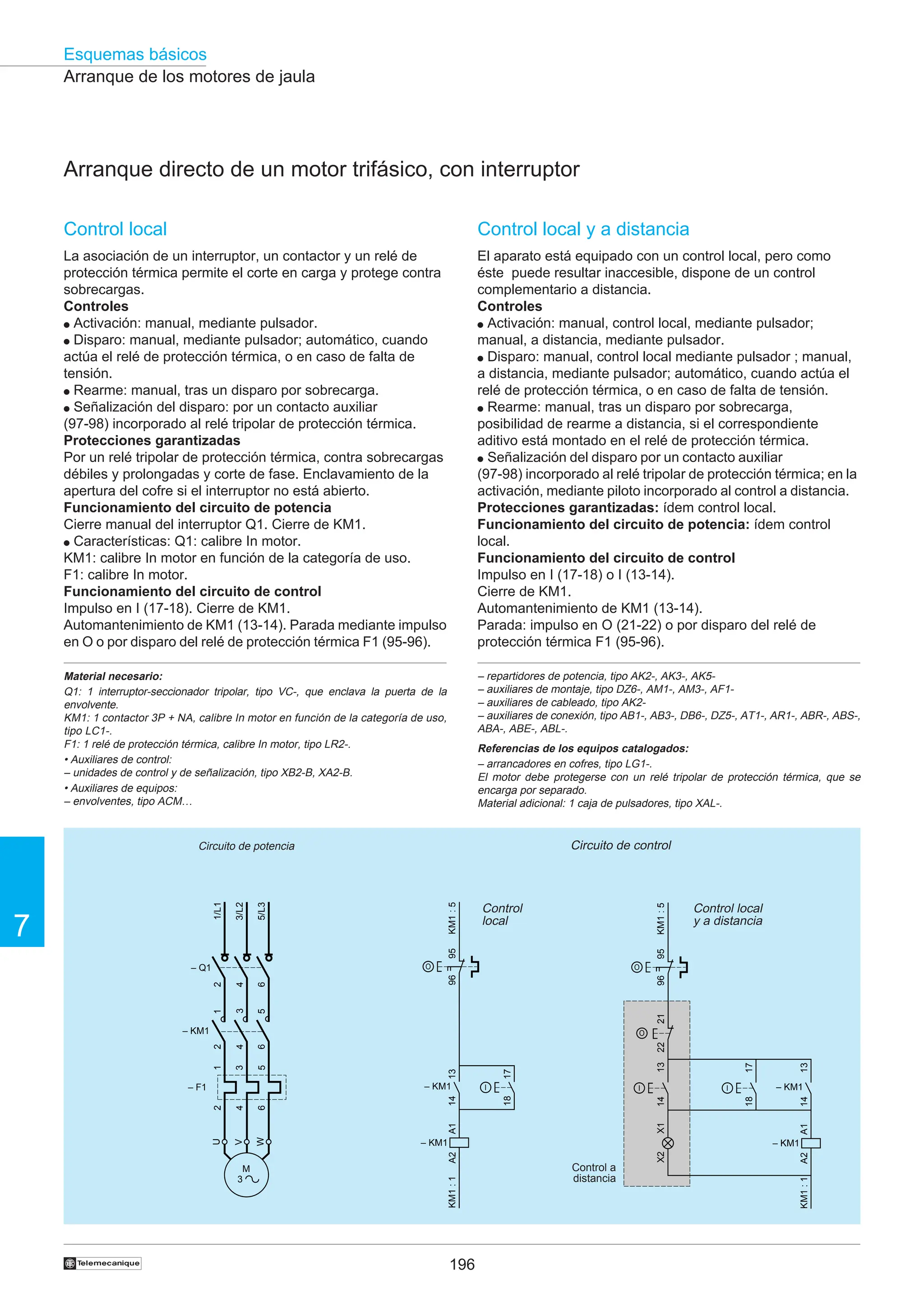
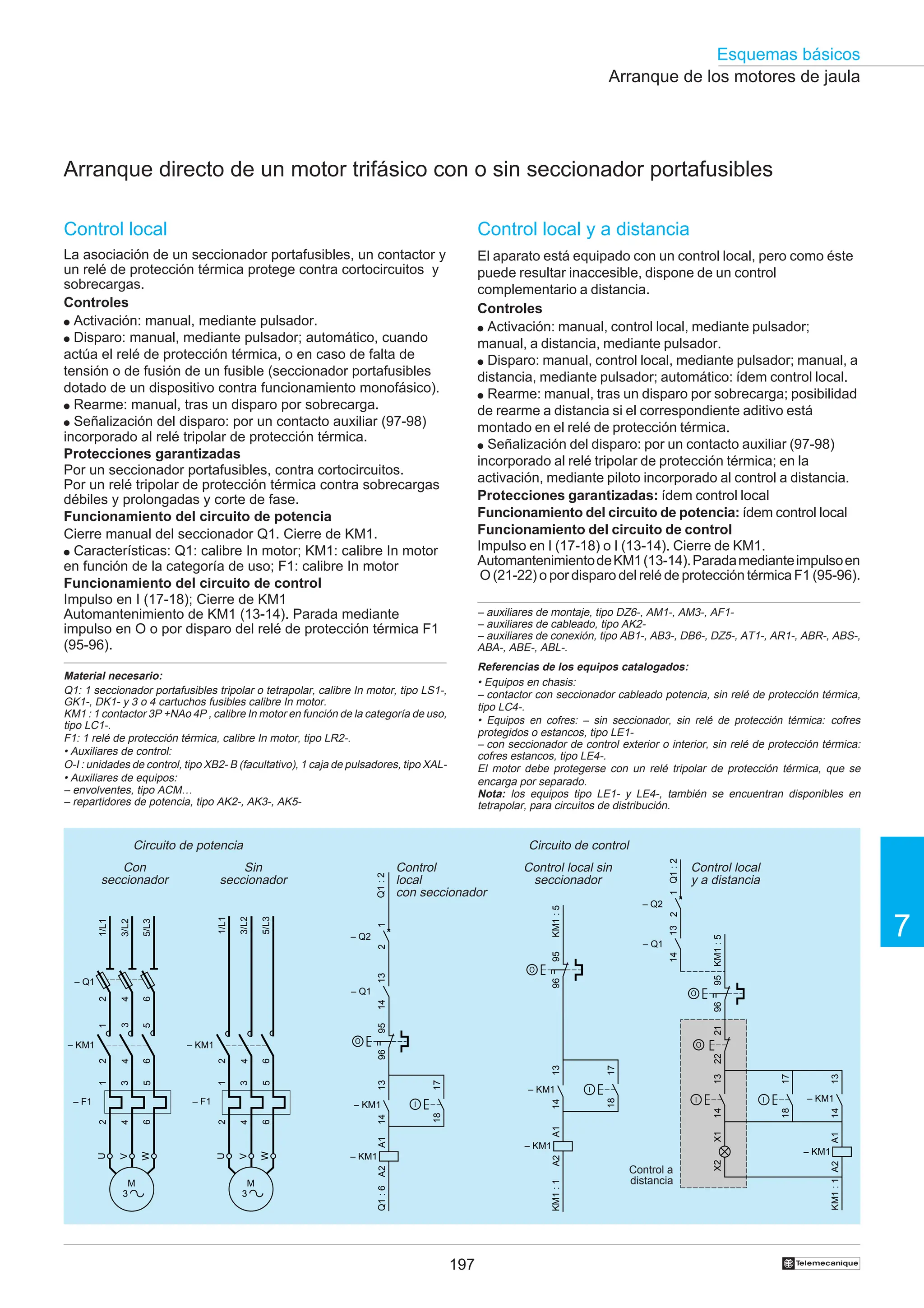
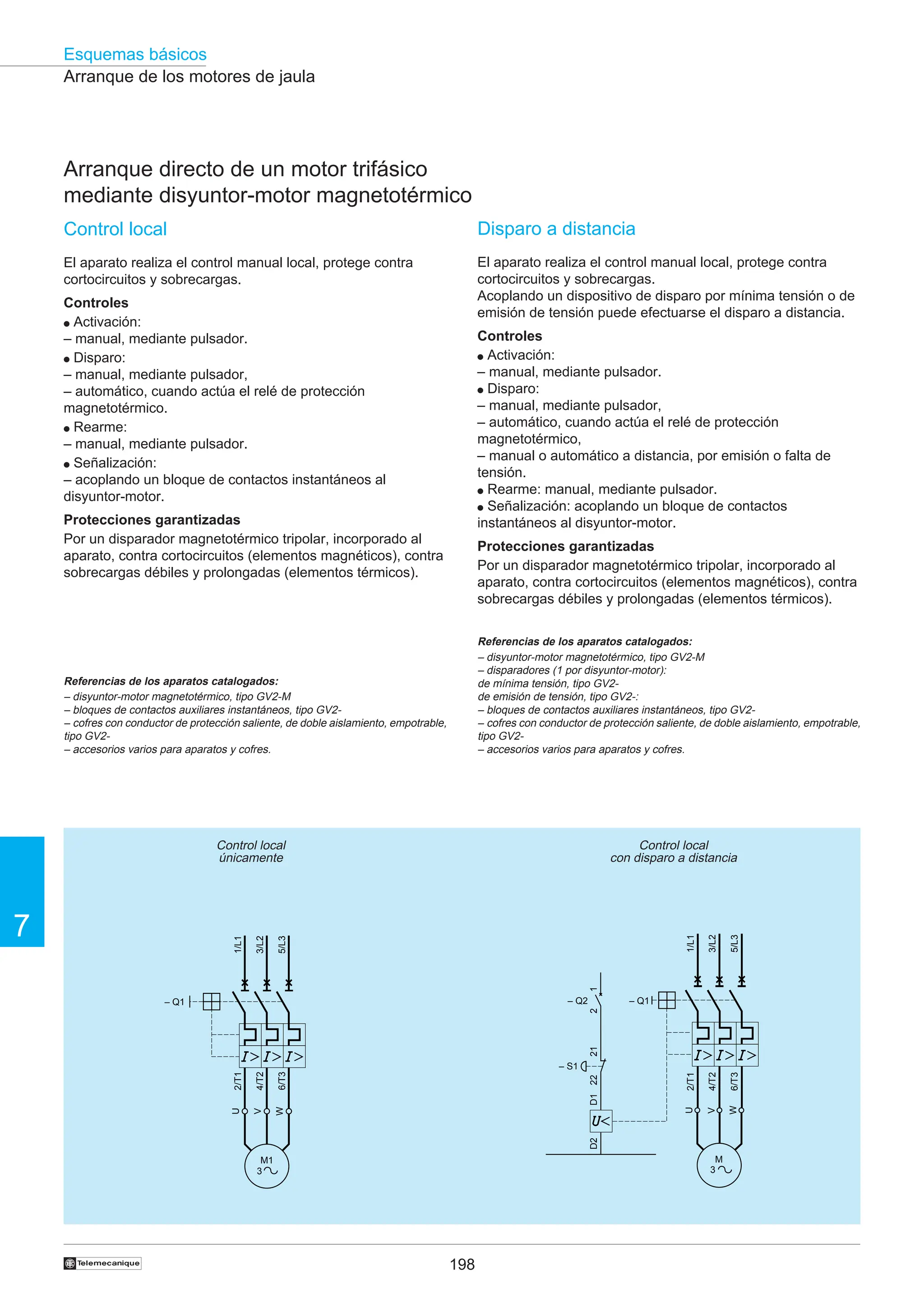
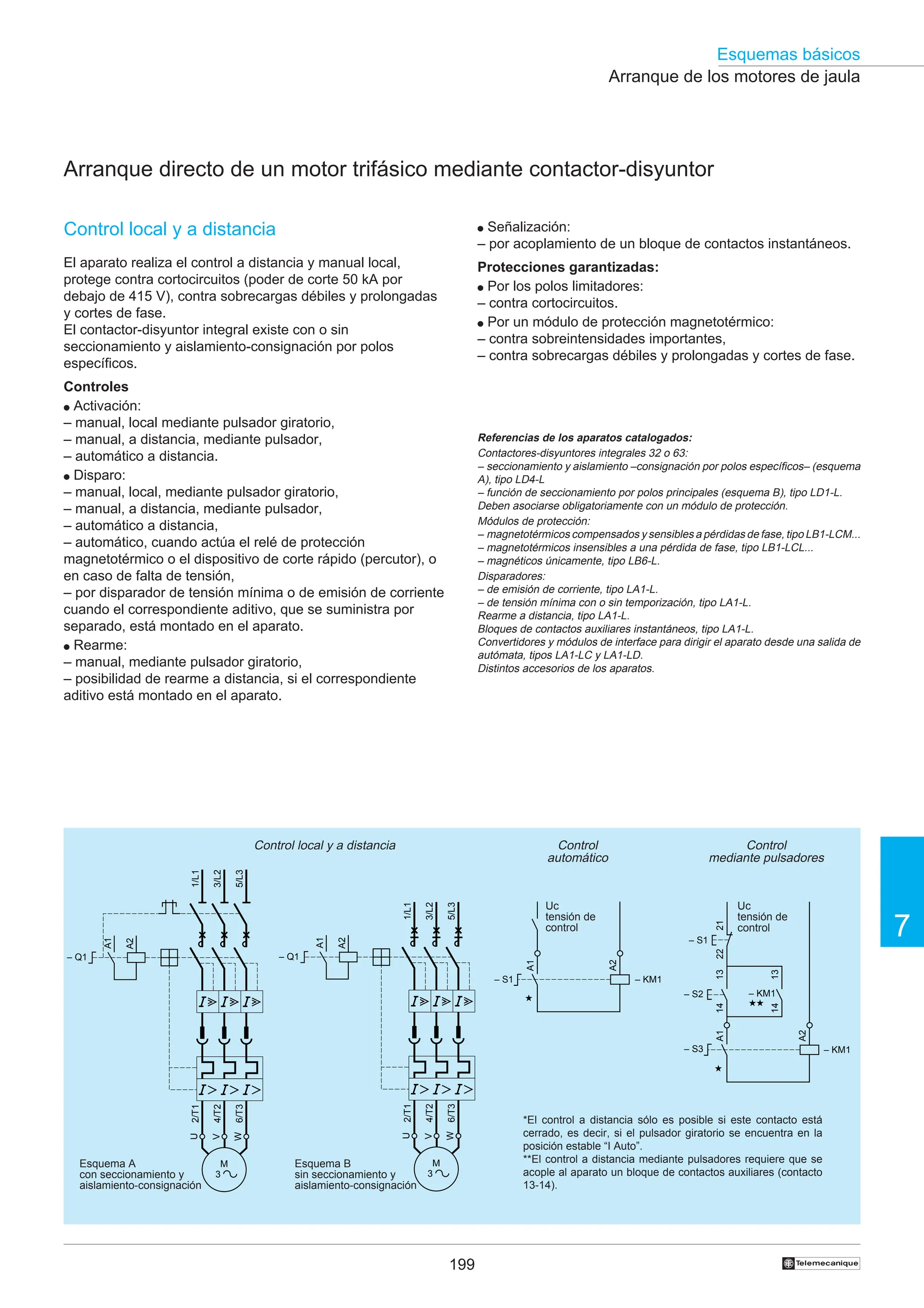
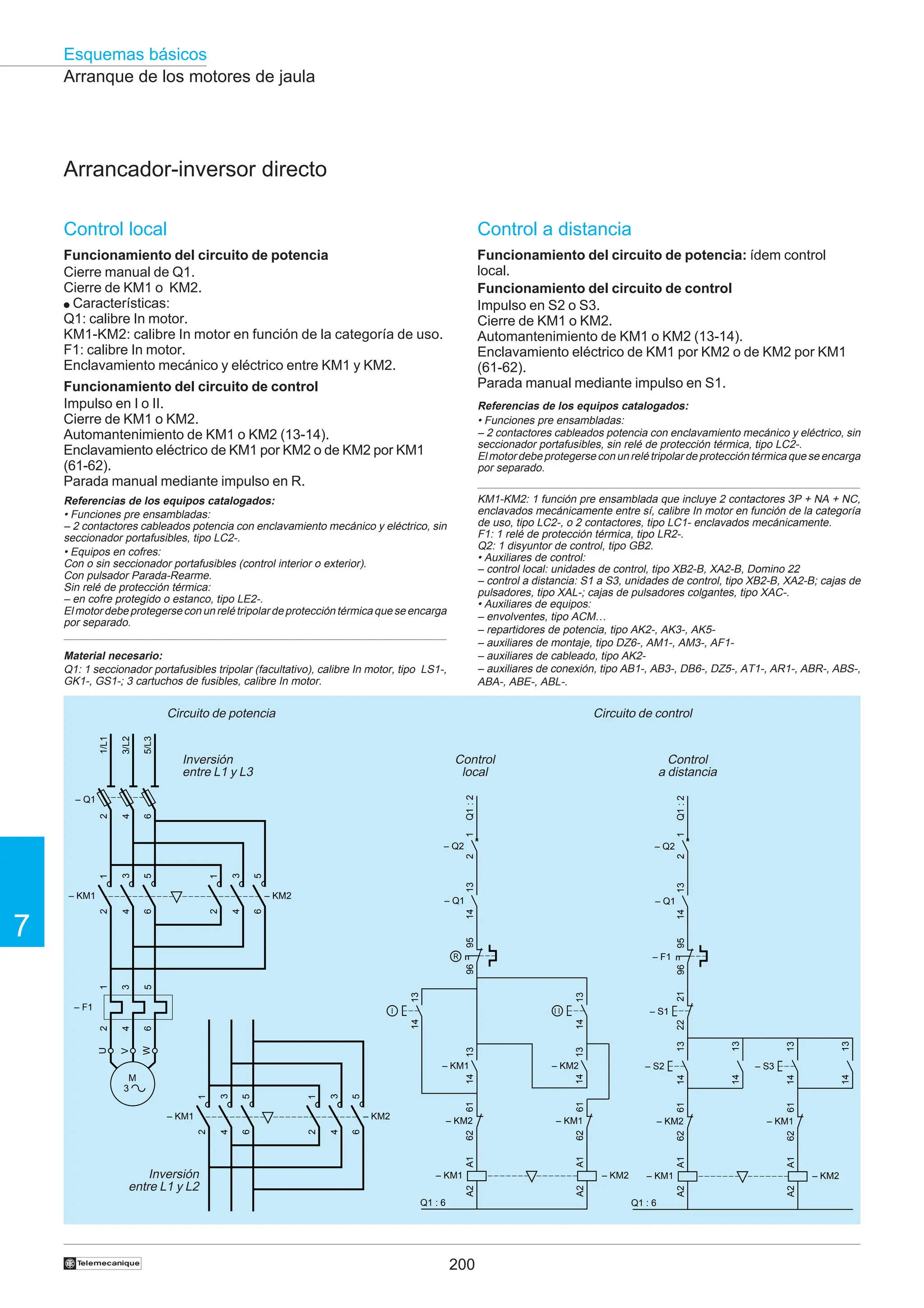
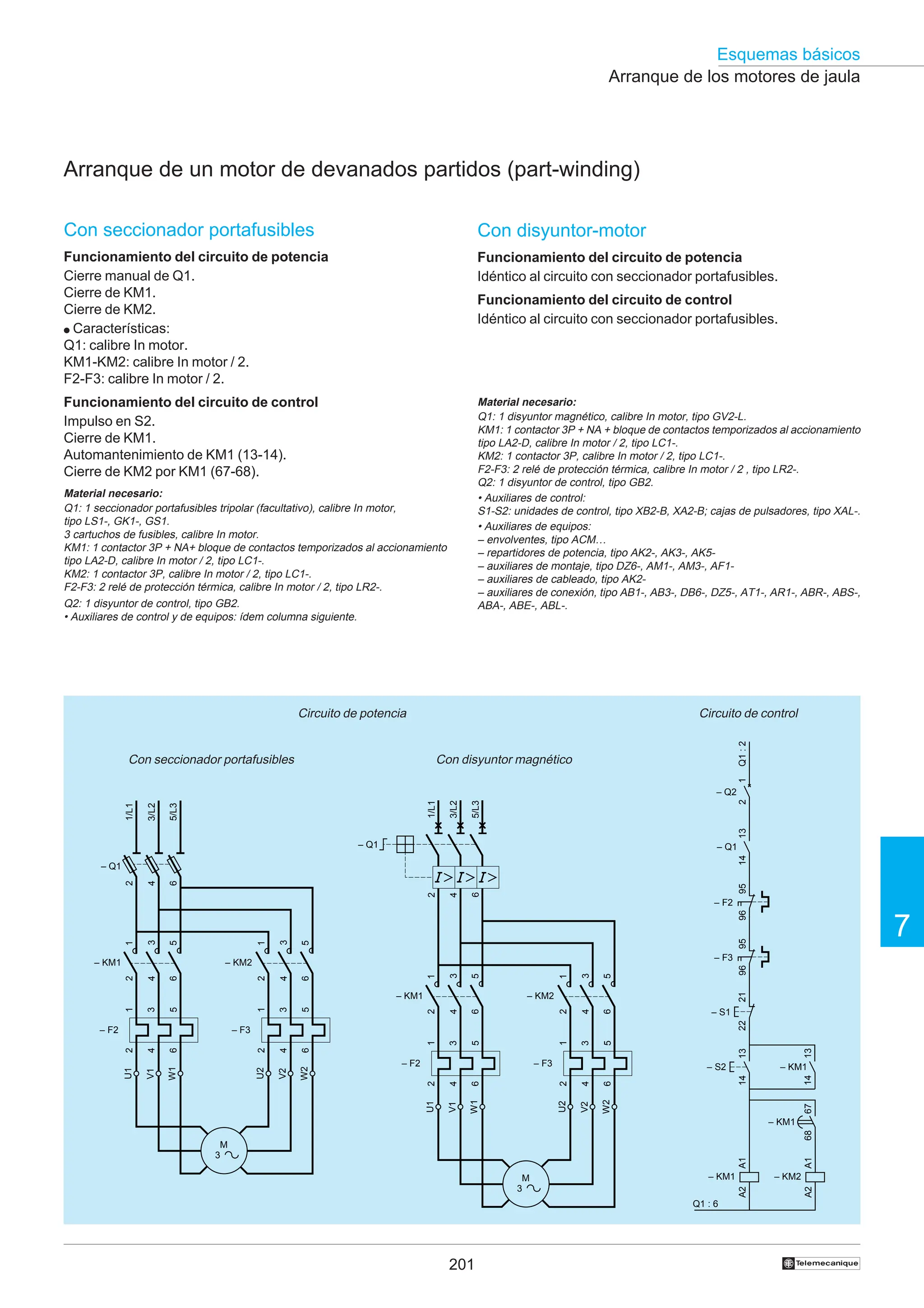
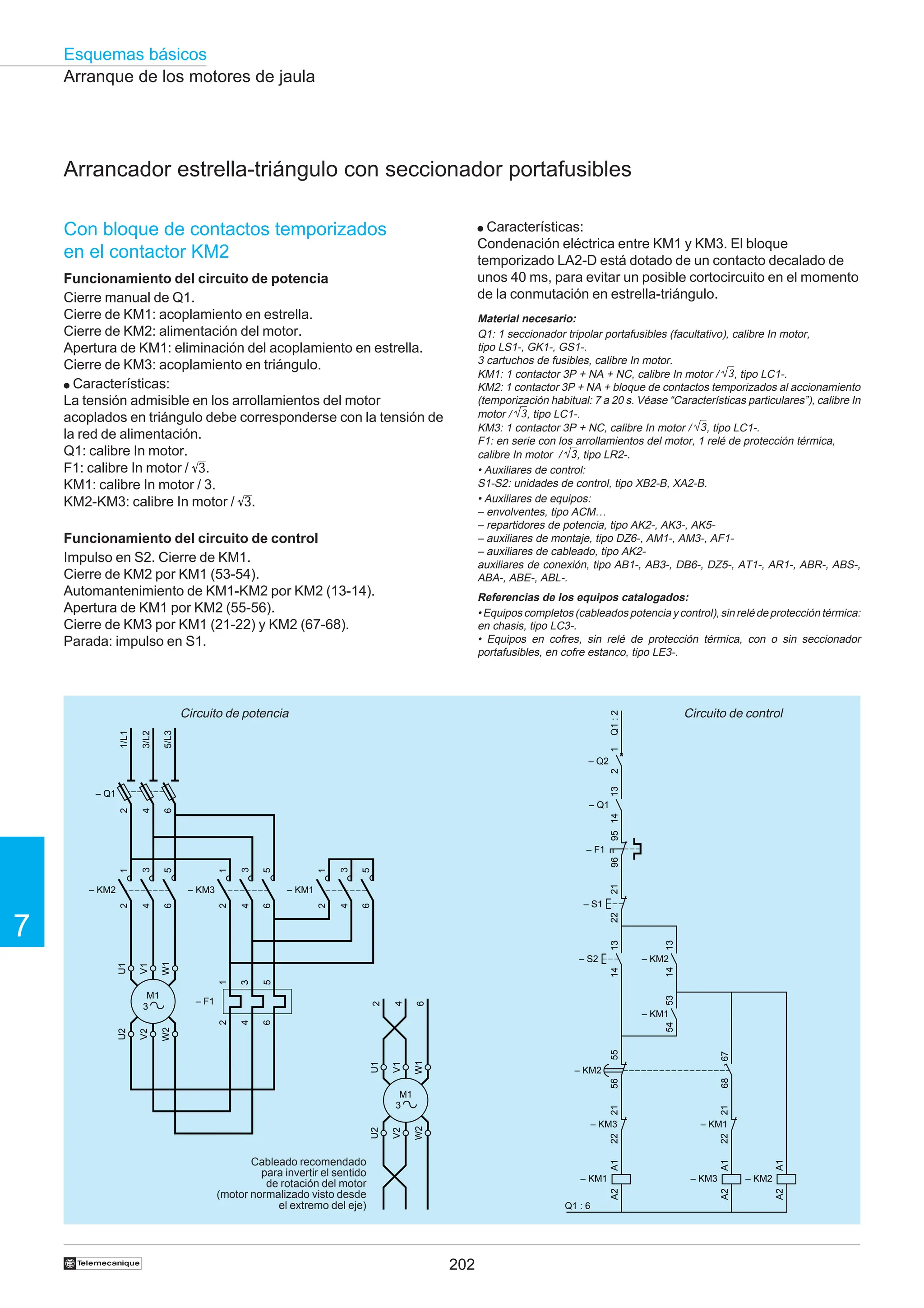
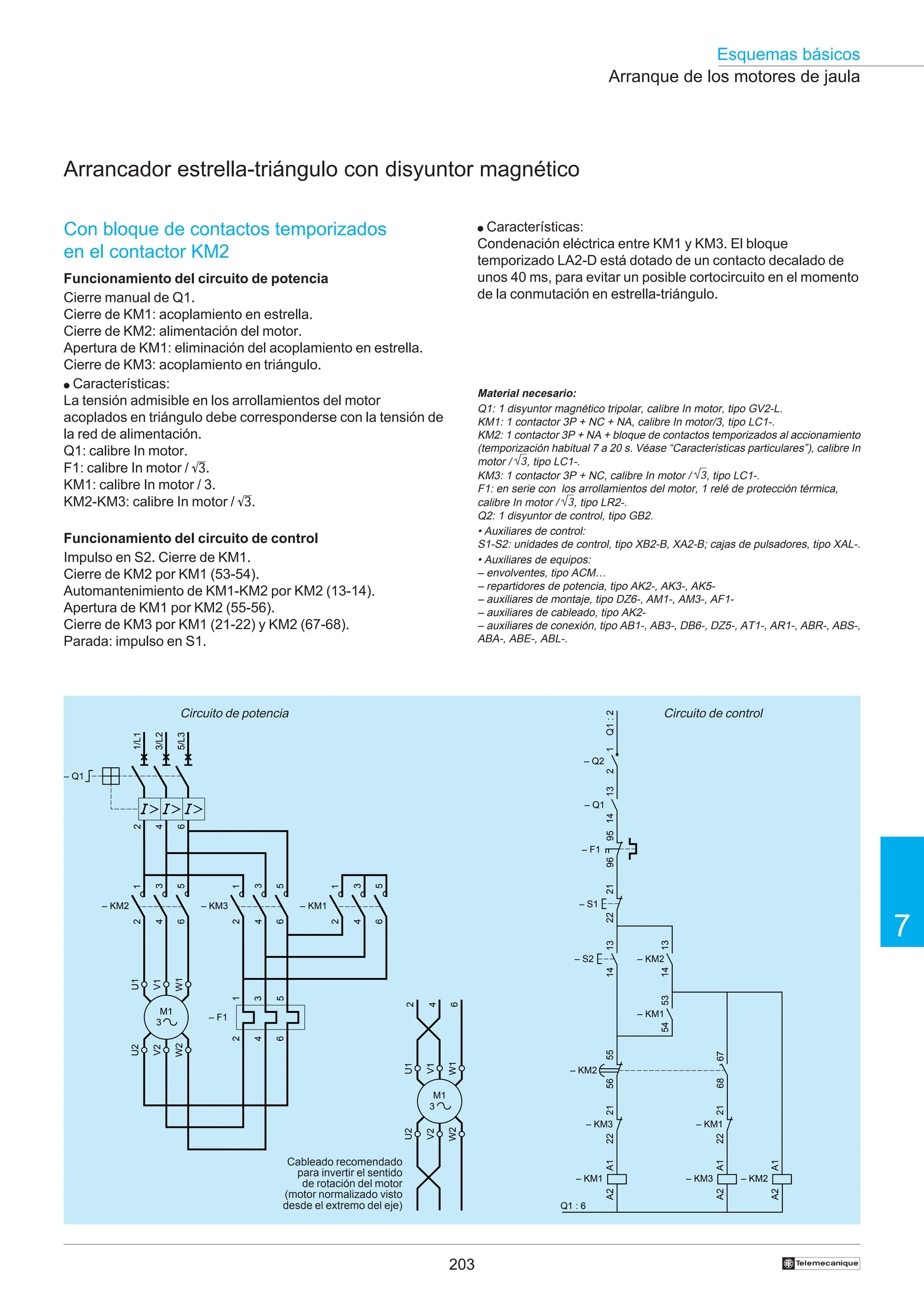
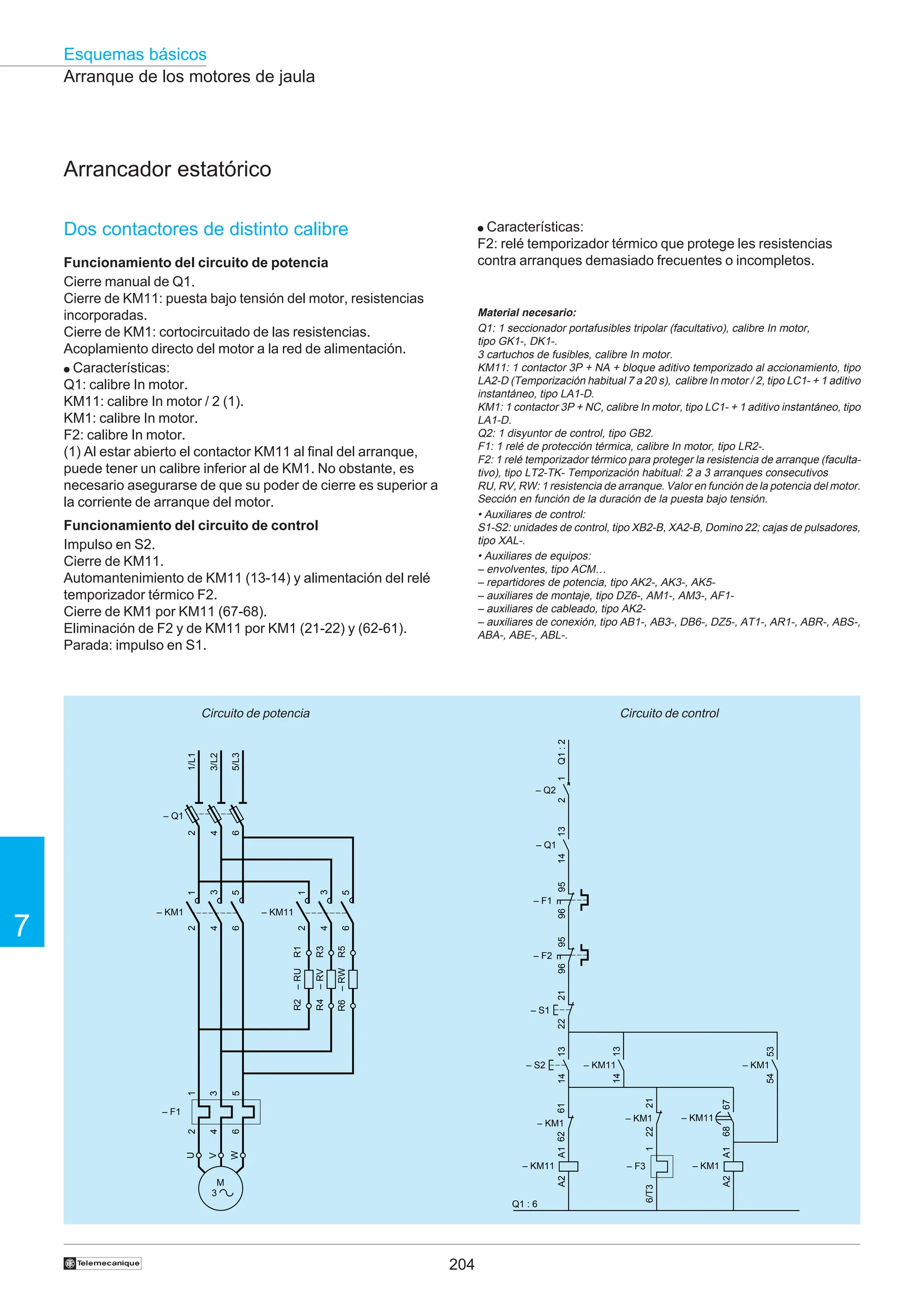
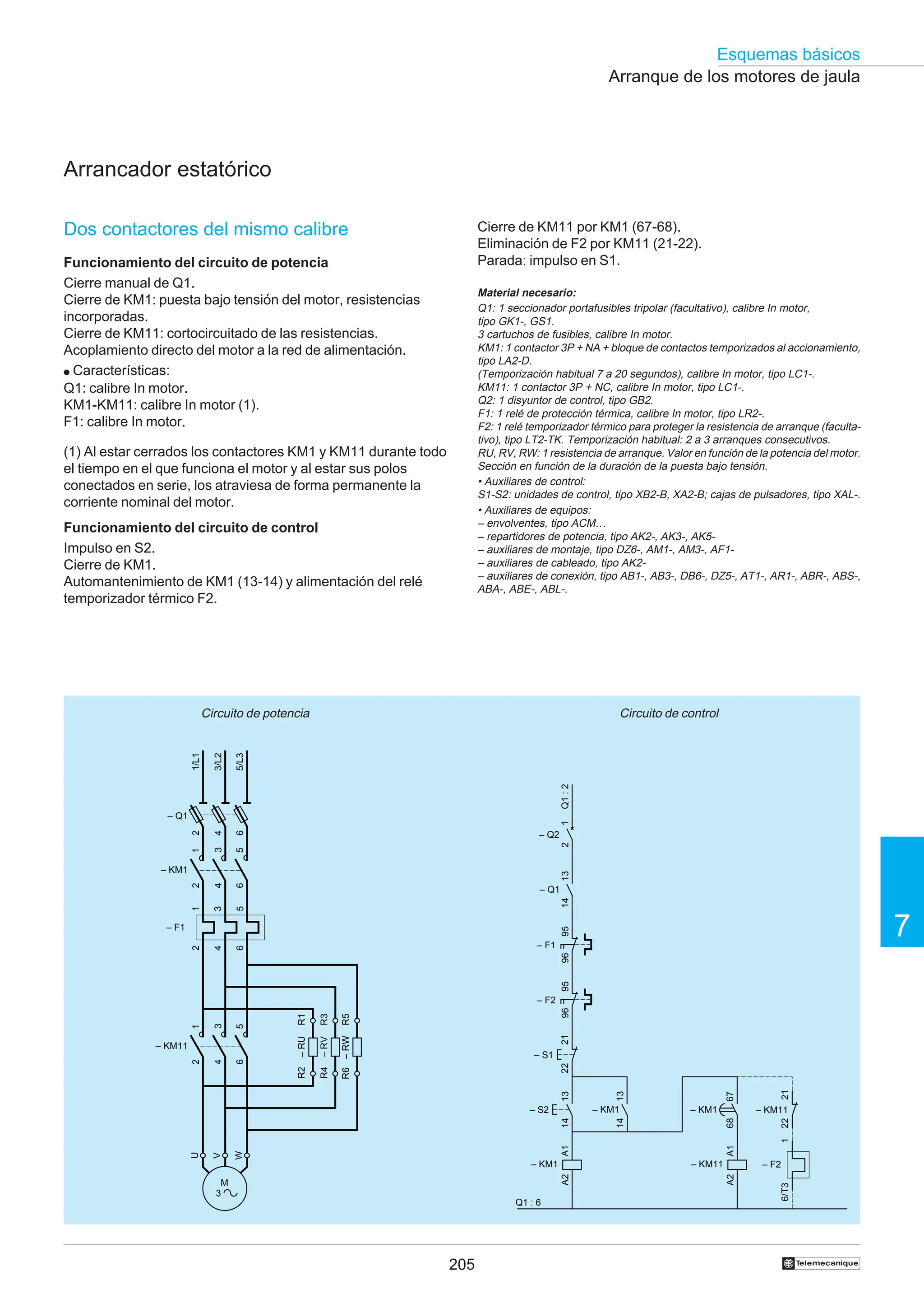
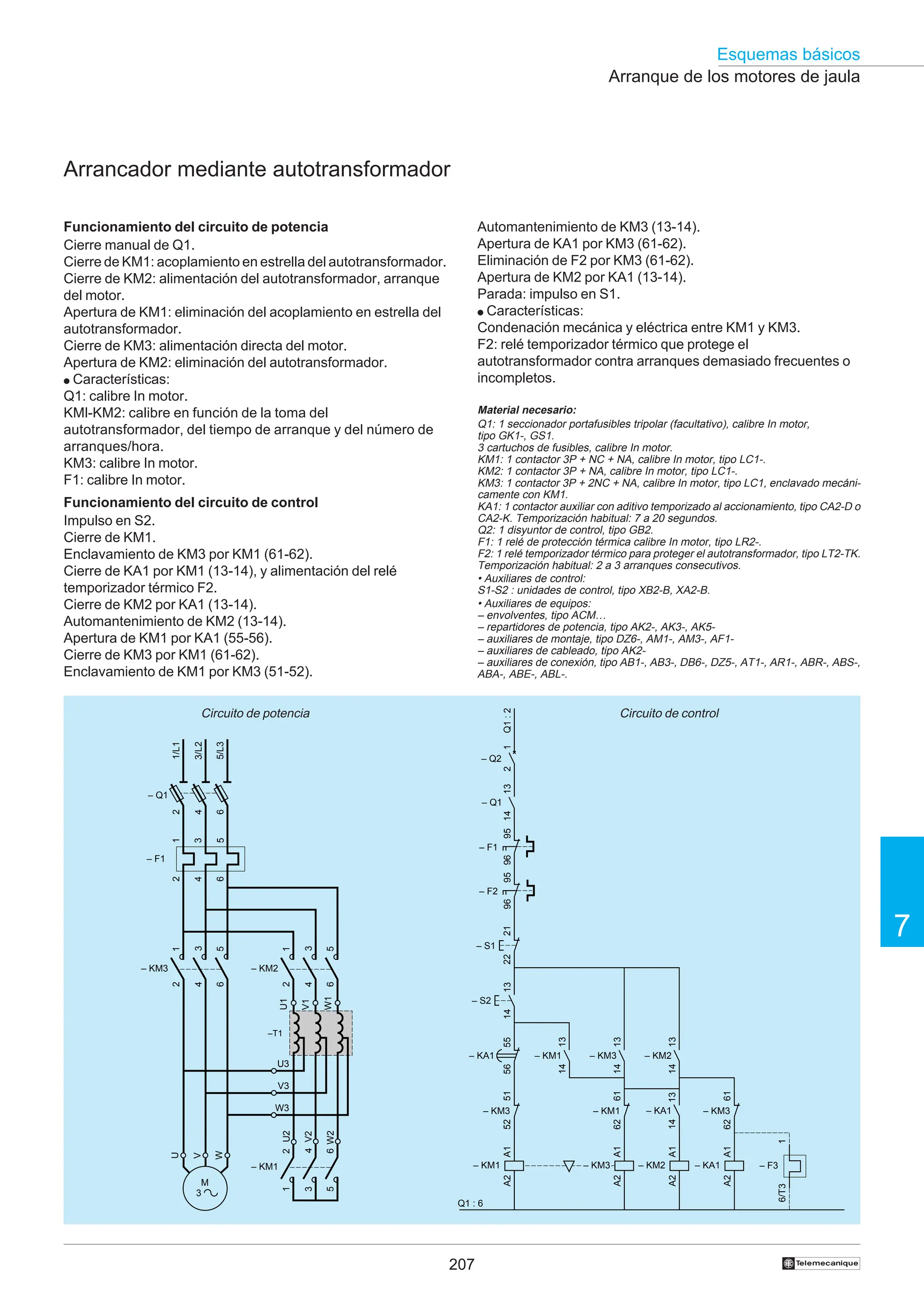
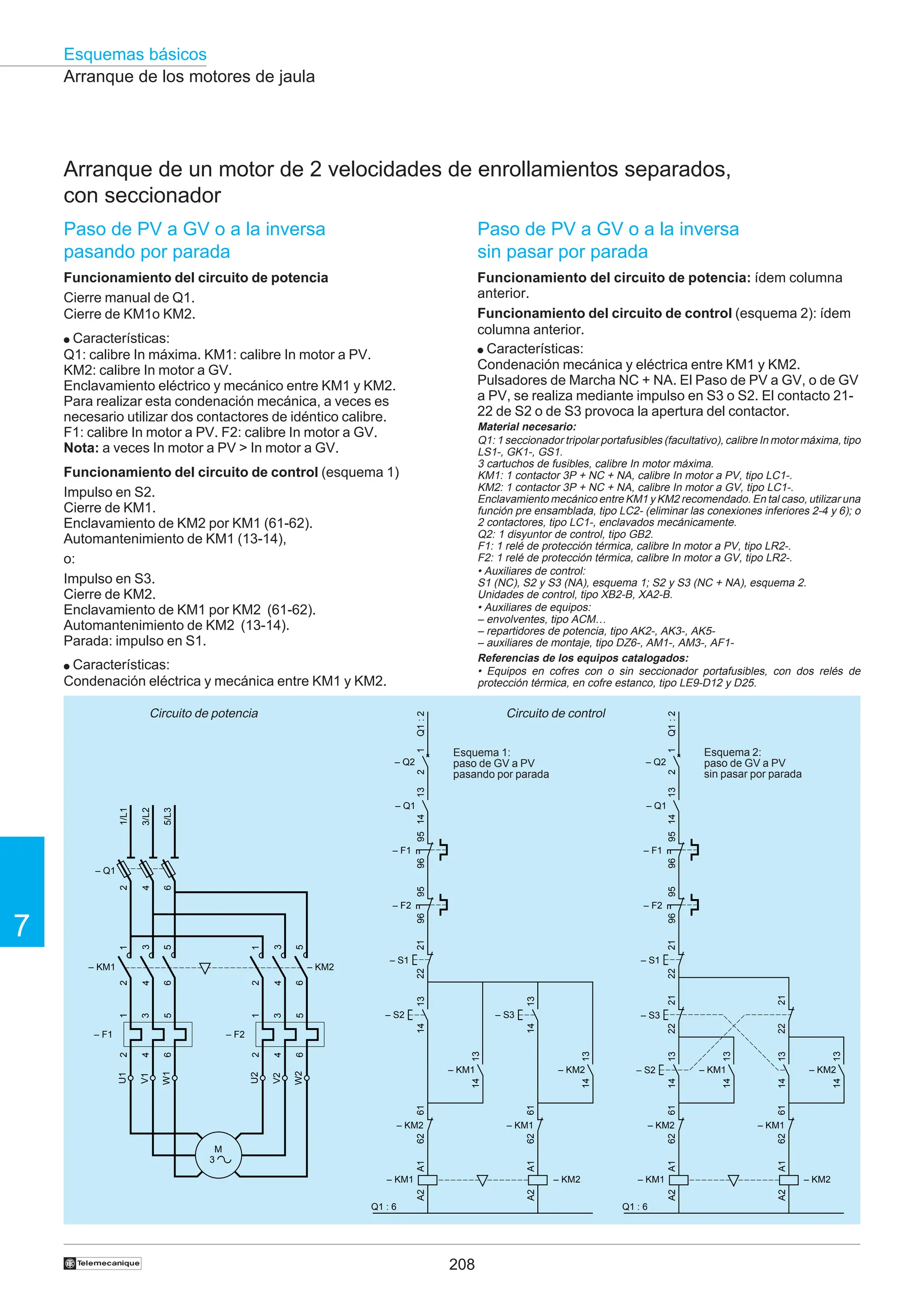
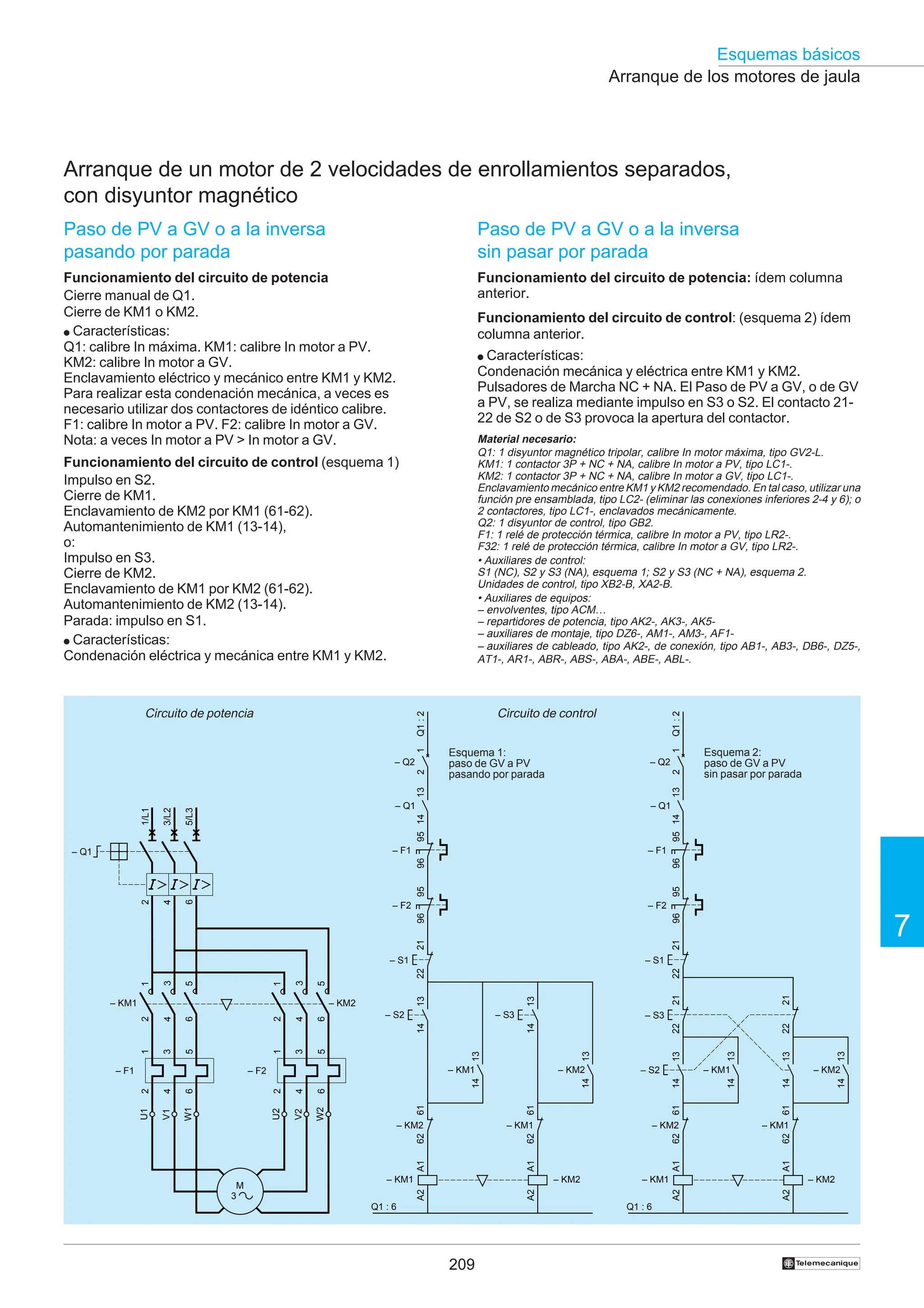
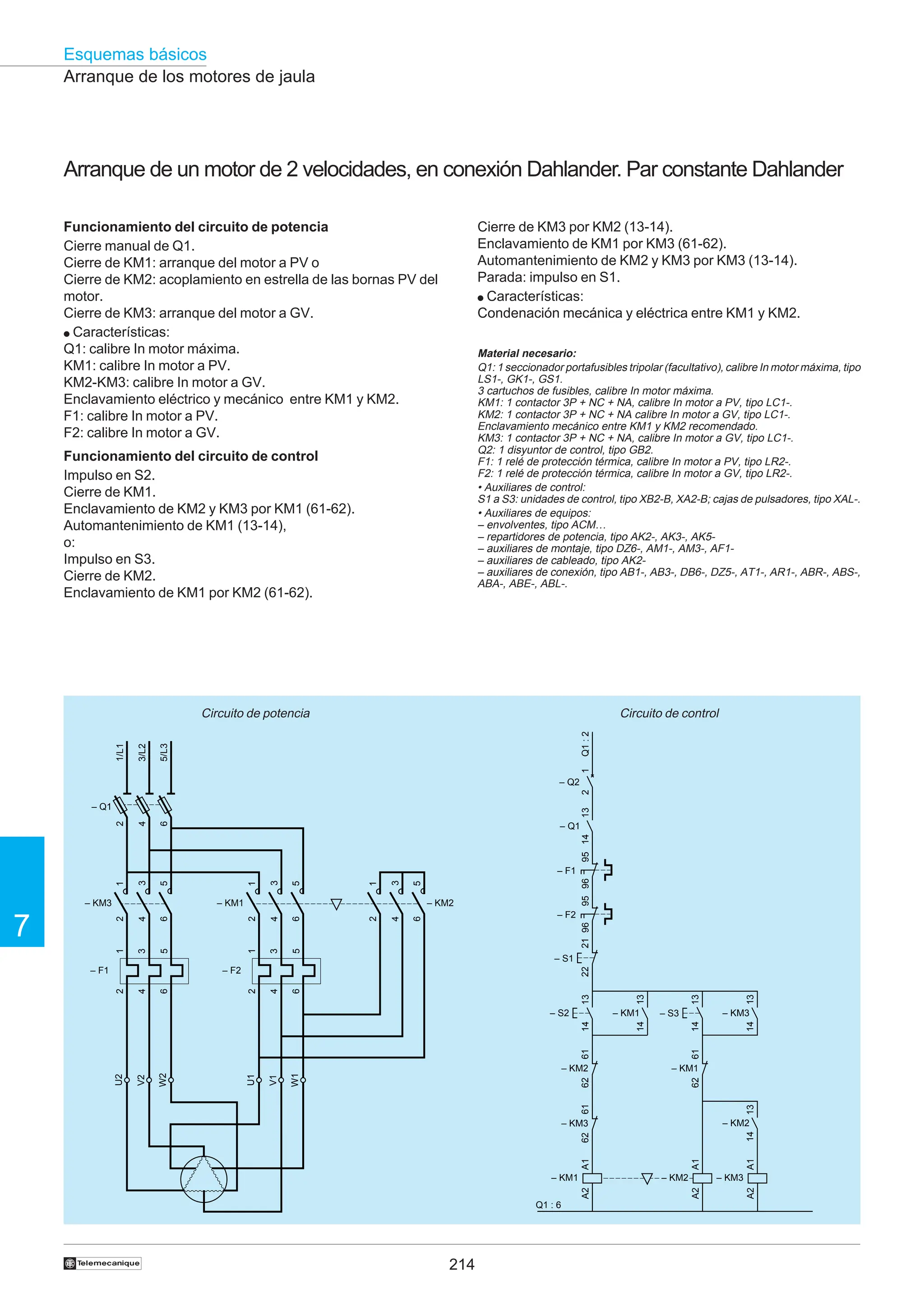
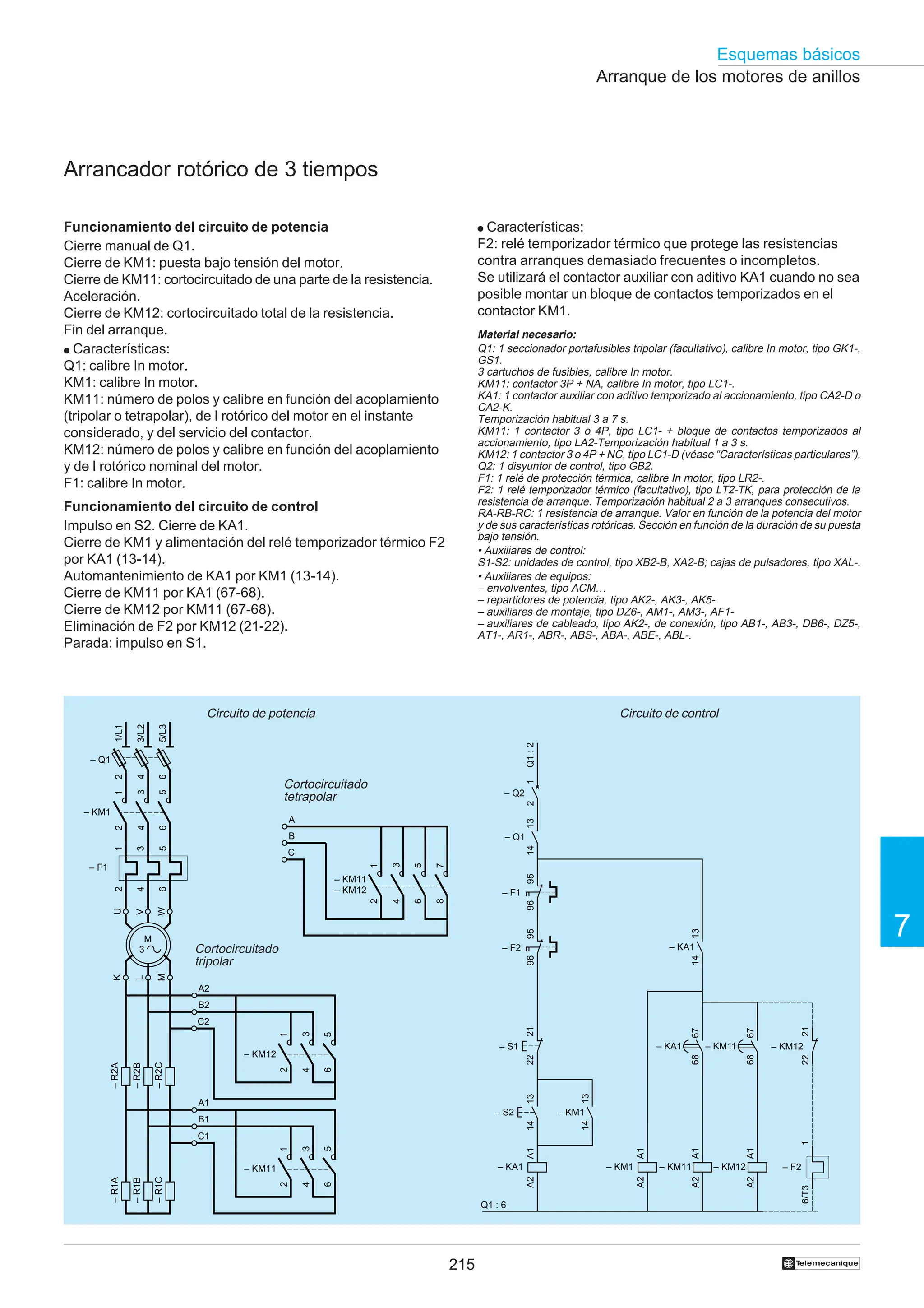
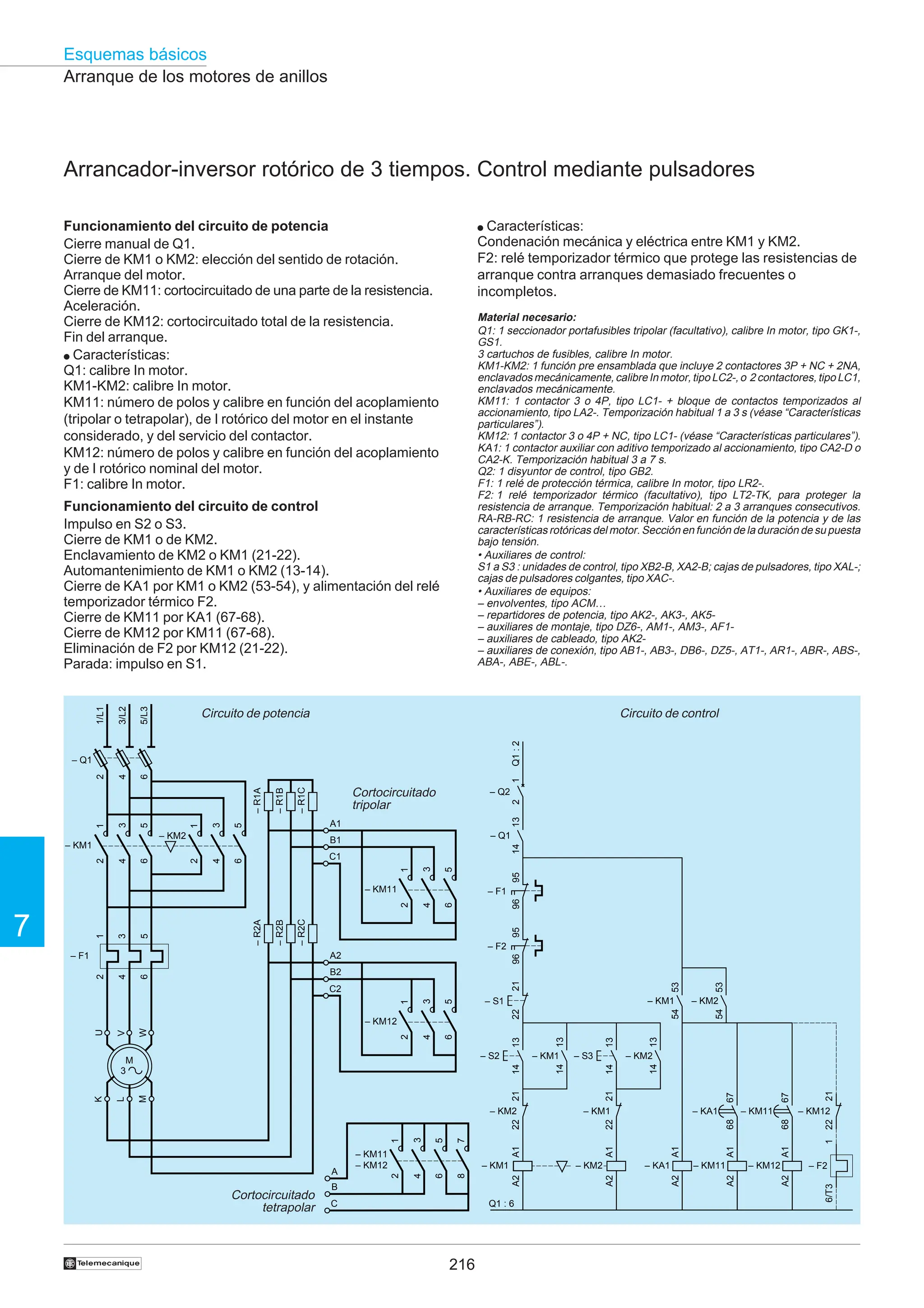
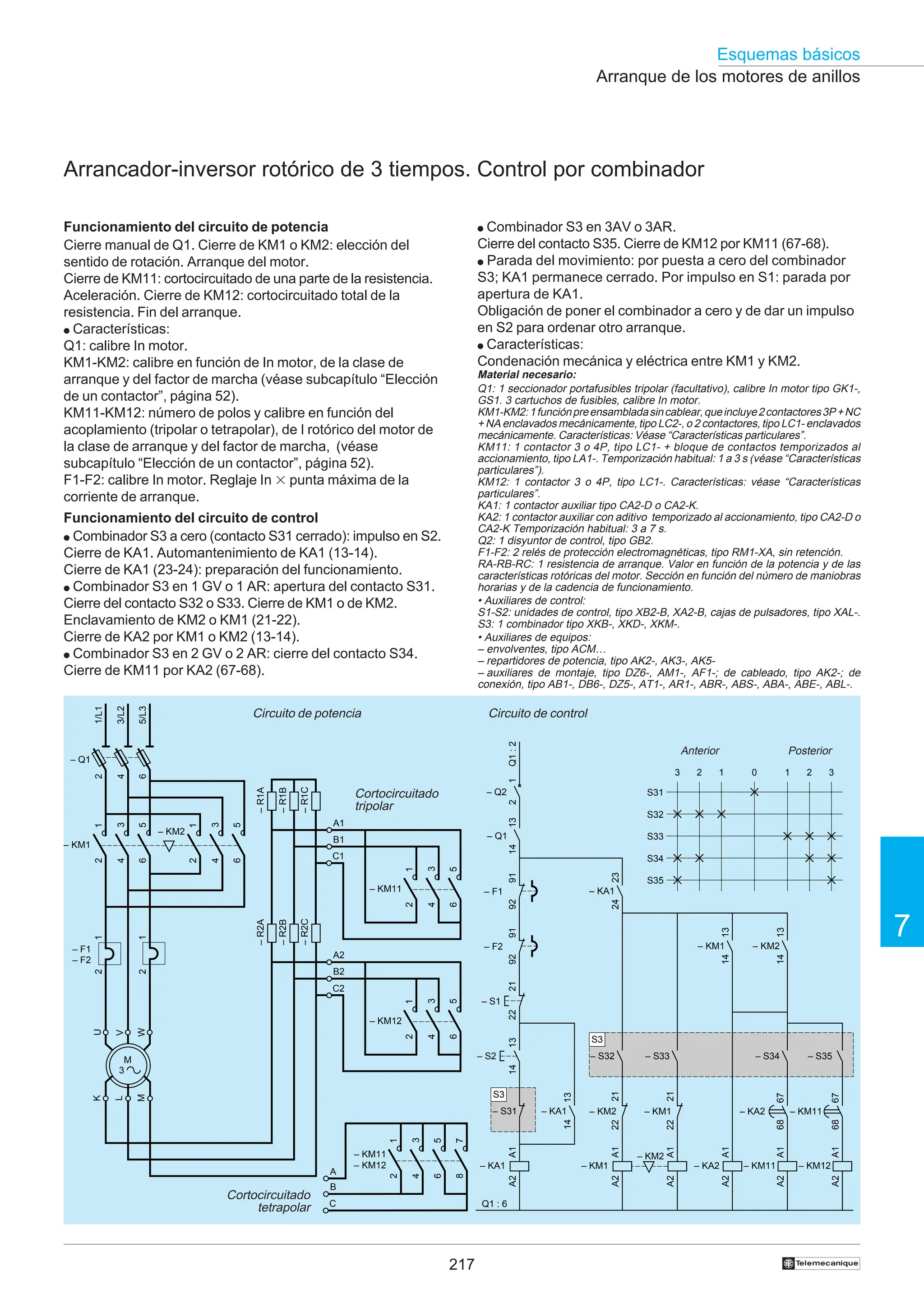
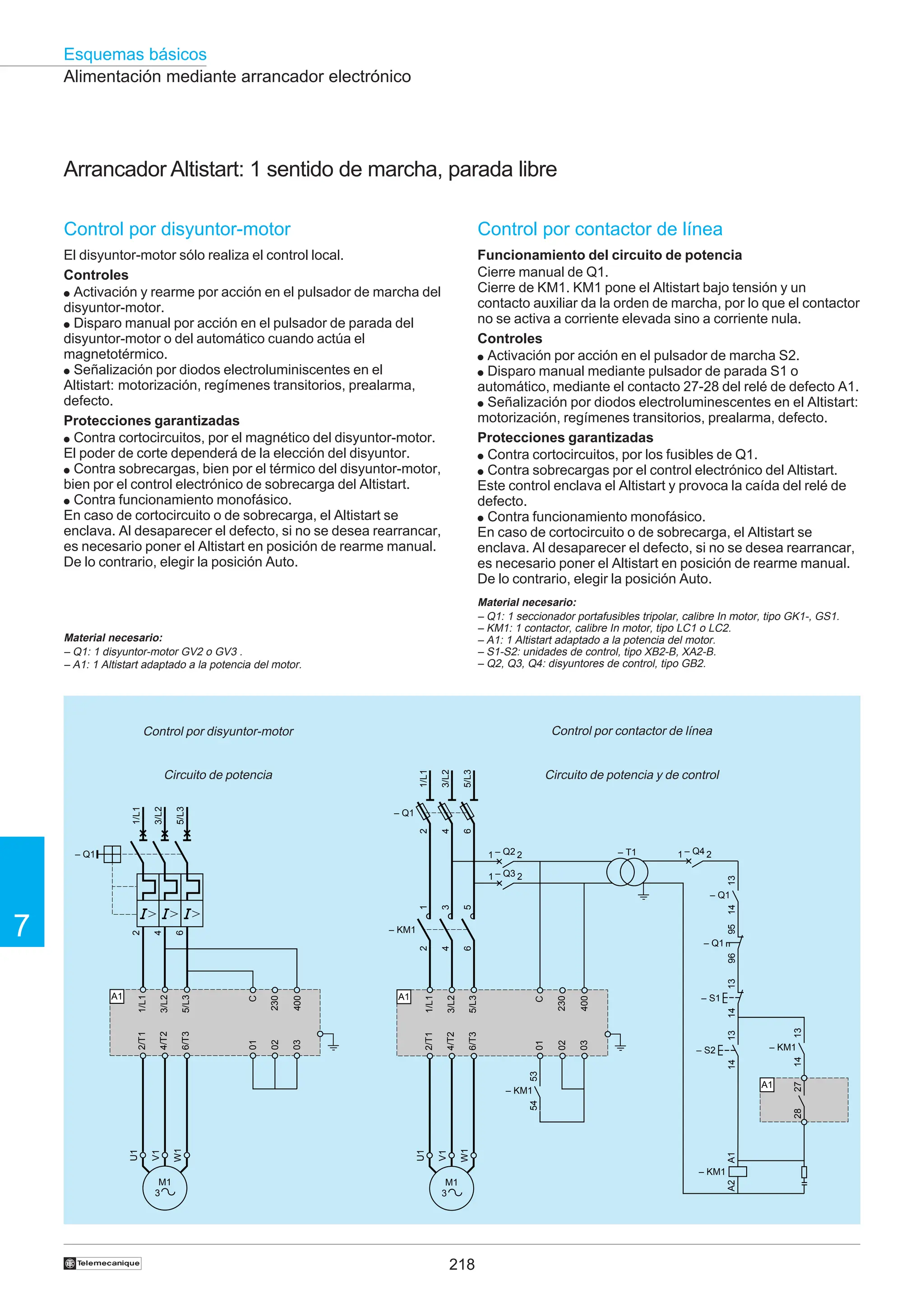
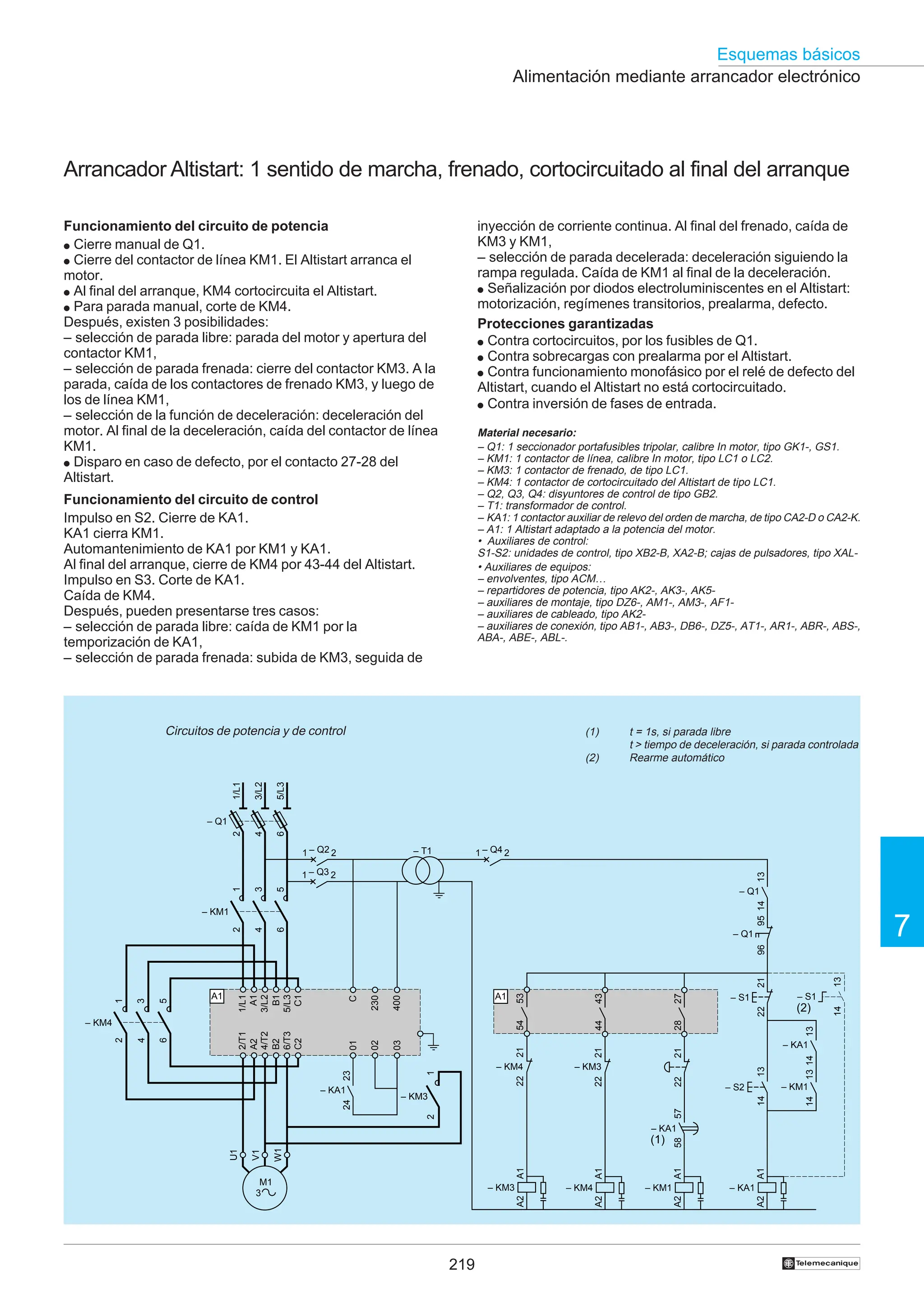
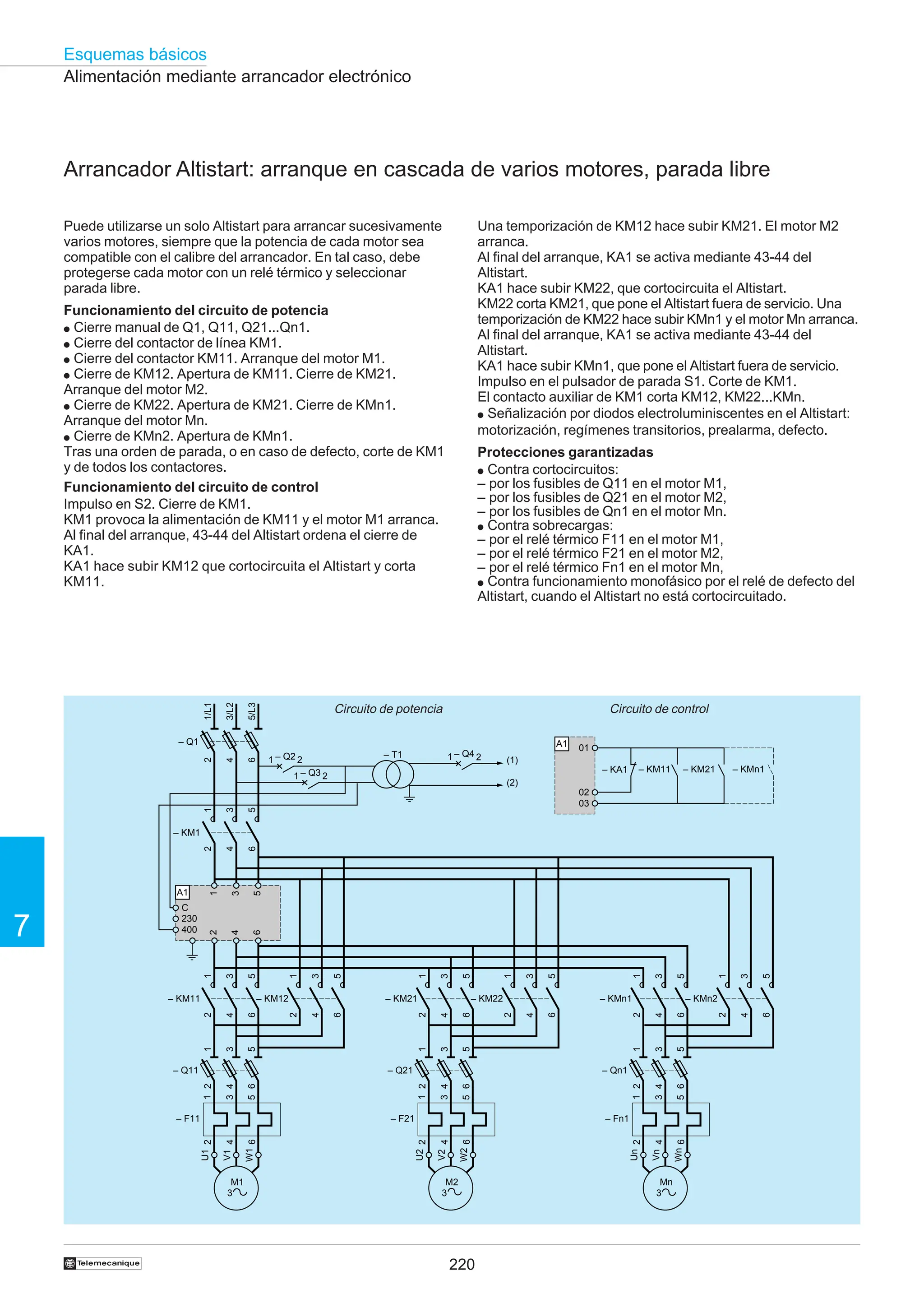
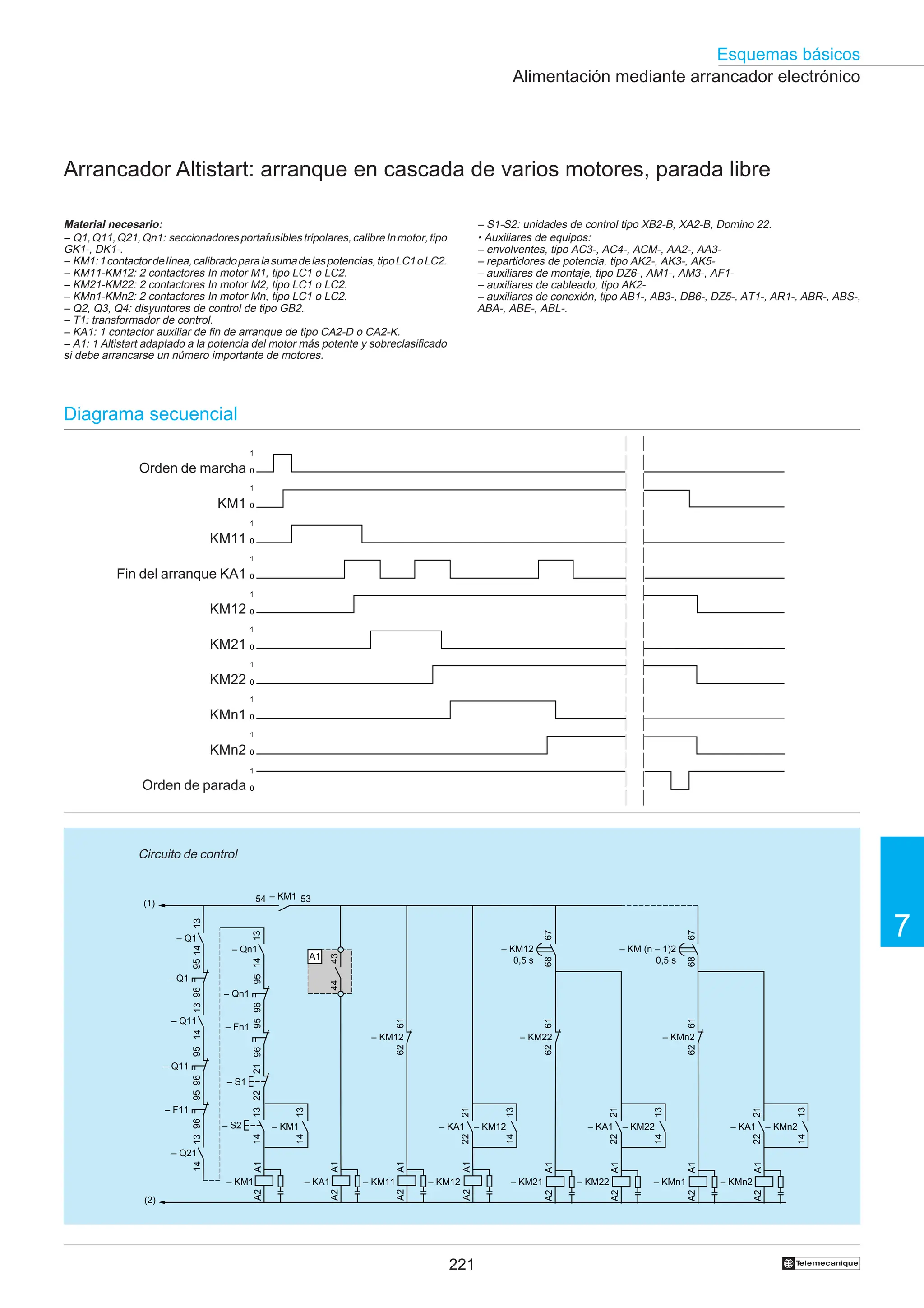
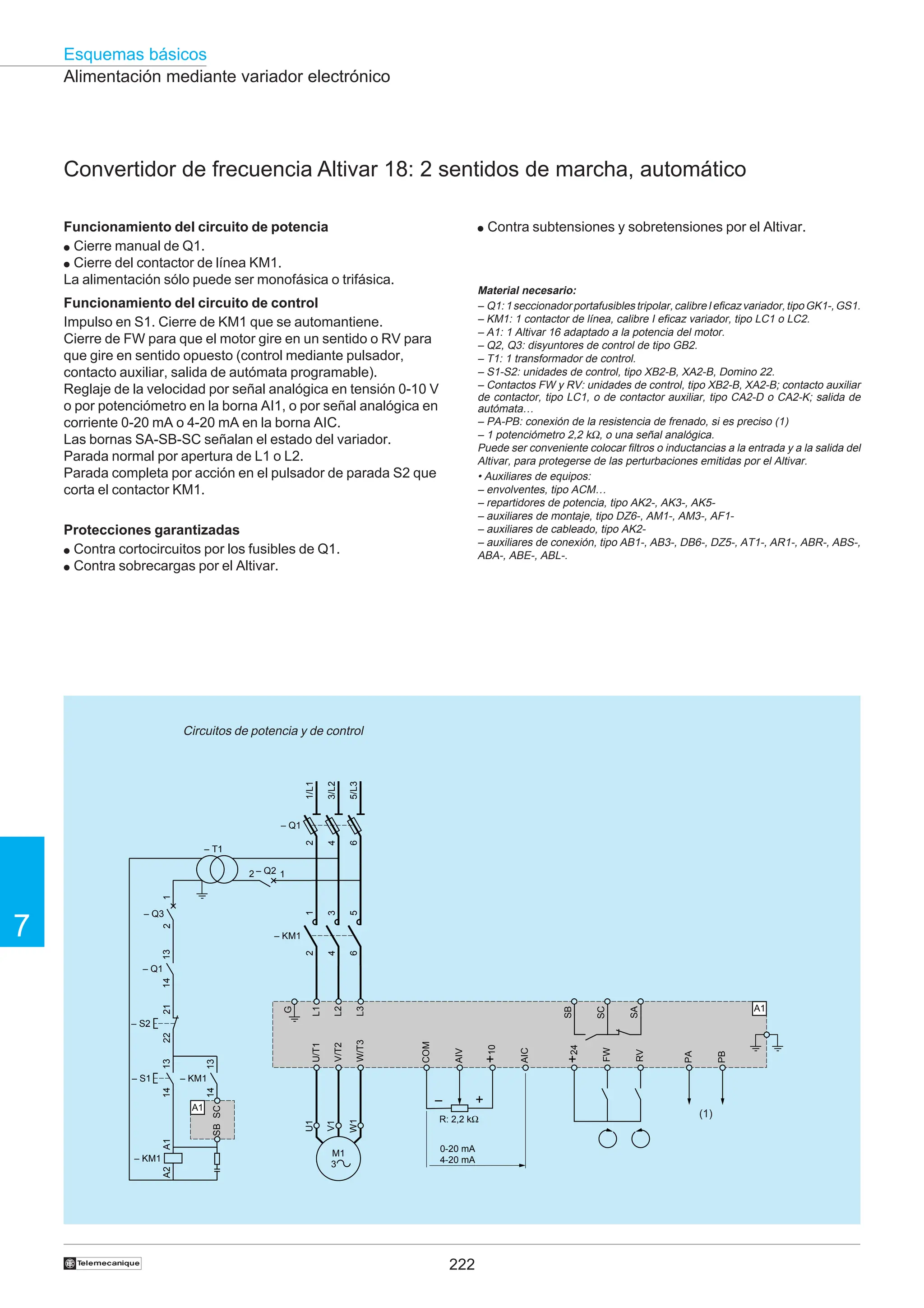
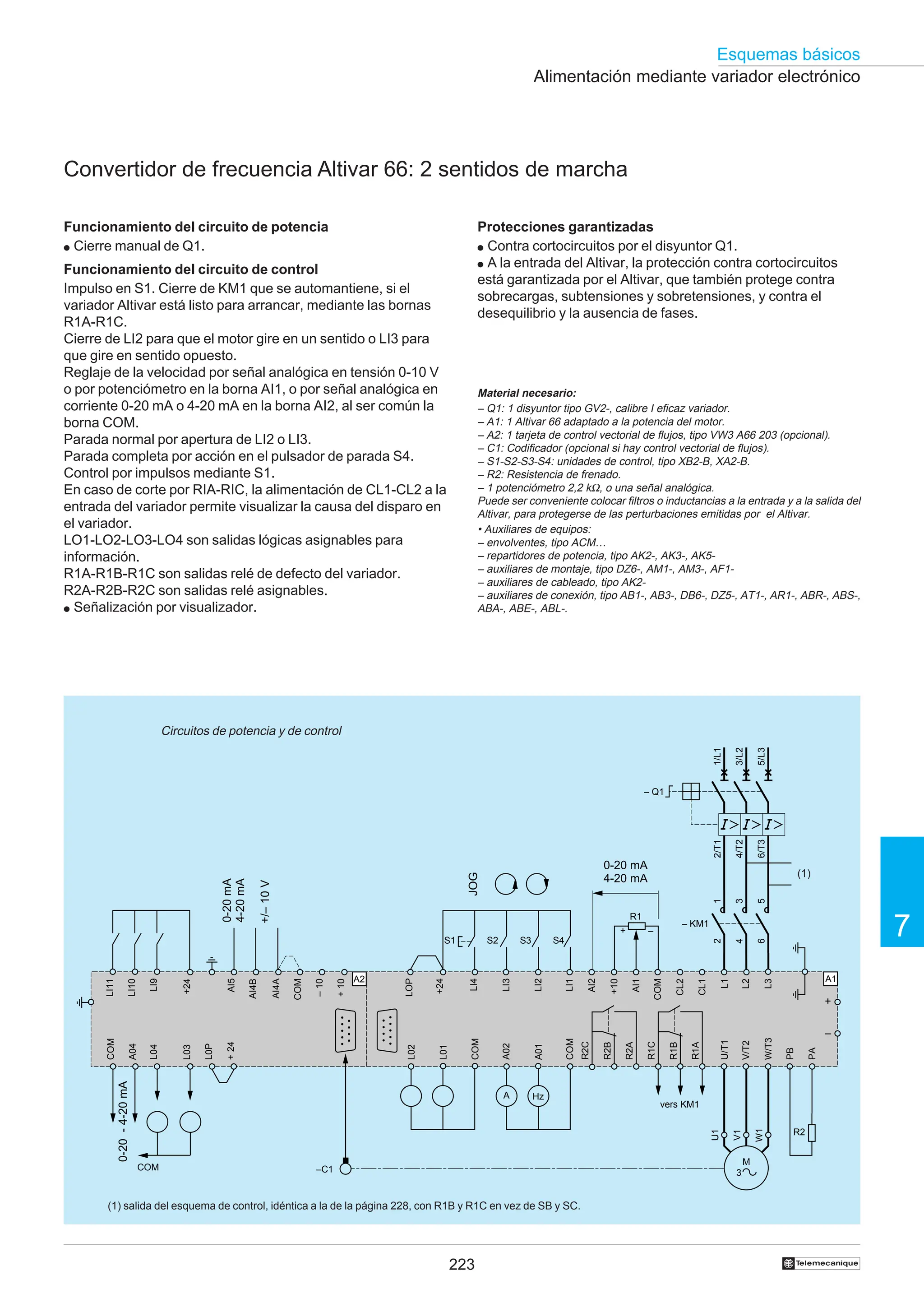
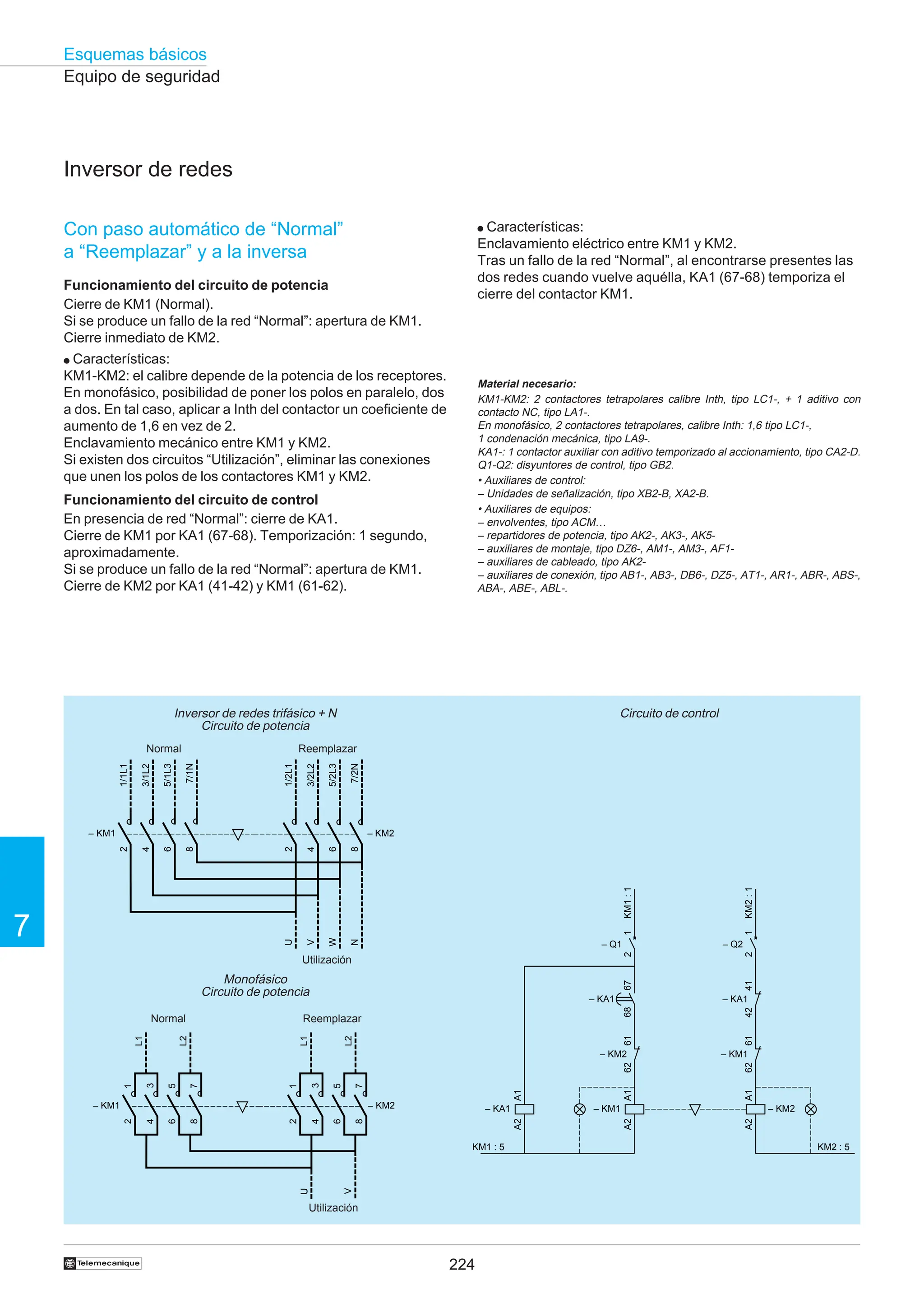
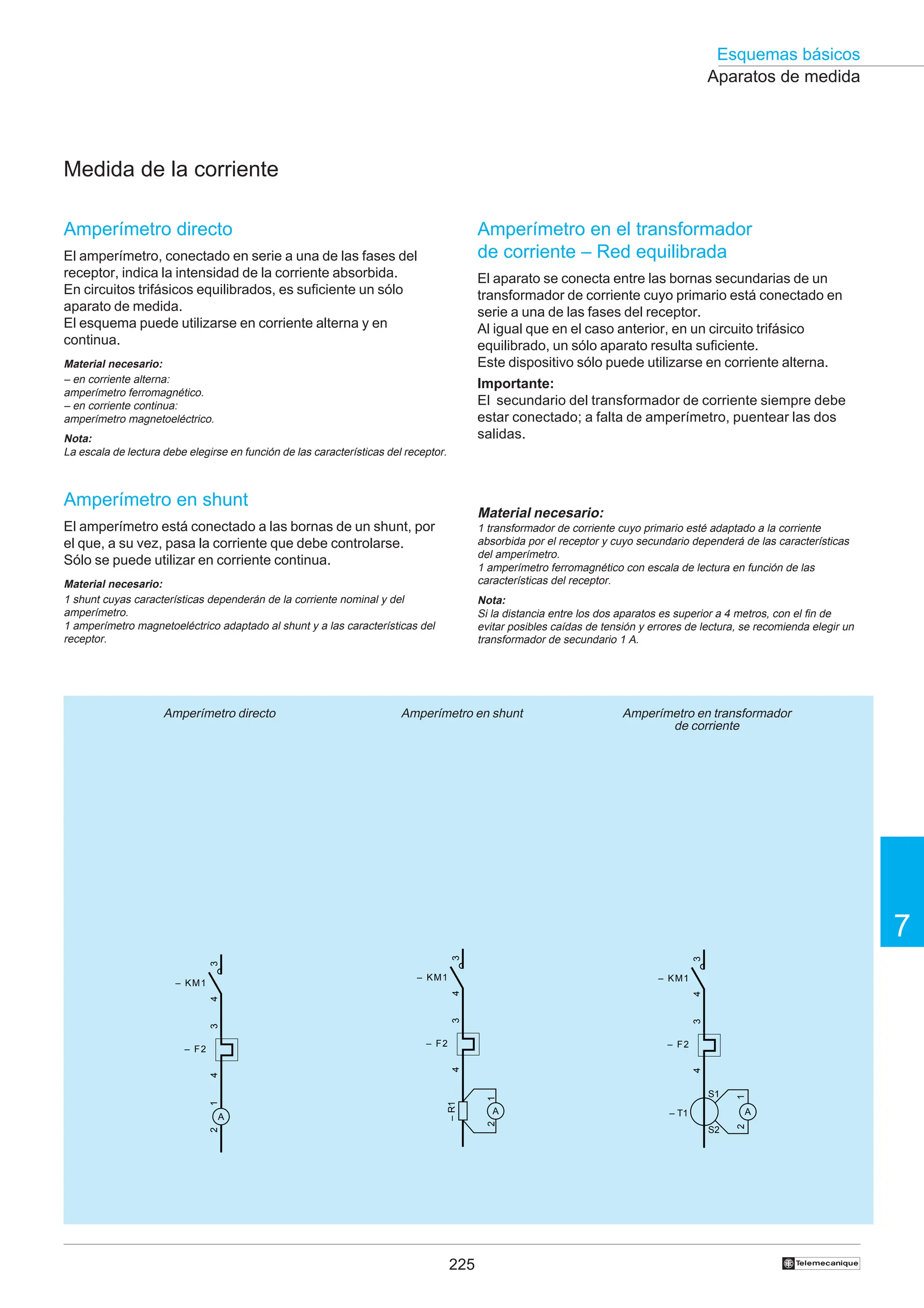
El manual electrotécnico de Telemécanique proporciona una guía detallada sobre el diseño y montaje de equipos eléctricos, abarcando desde los esquemas básicos de automatismos hasta la interrelación entre componentes electromecánicos y electrónicos. Se discuten aspectos clave como el control de potencia, la protección de motores y la función de los arrancadores, además de incluir normas internacionales y definiciones relevantes. Este documento sirve como una herramienta pedagógica para profesionales en el campo, facilitando la comprensión de tecnologías y normativas aplicables en el ámbito del control industrial.