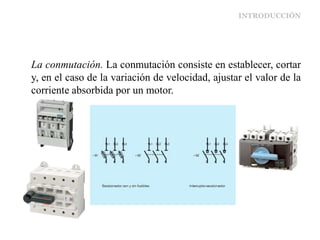
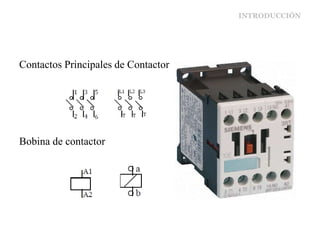
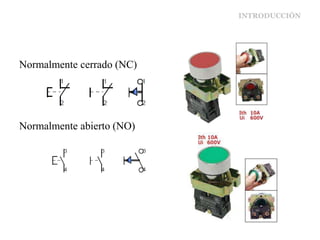
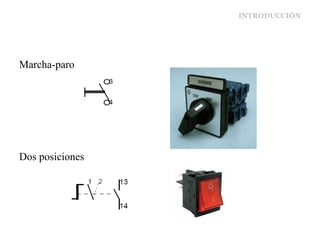
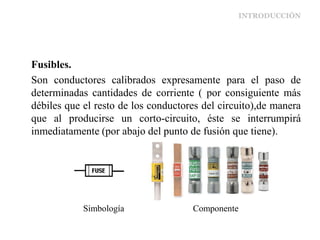
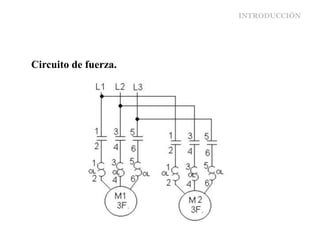
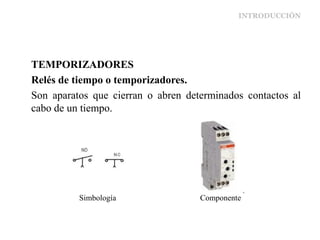
Este documento introduce los conceptos básicos del control de motores eléctricos, incluyendo los componentes y esquemas de control más comunes. Explica el funcionamiento y tipos de contactores, arrancadores, protecciones y dispositivos de señalización utilizados para controlar y proteger motores de manera automática. También presenta los símbolos normalizados para la representación de estos componentes en esquemas de control.