Descargado 25 veces











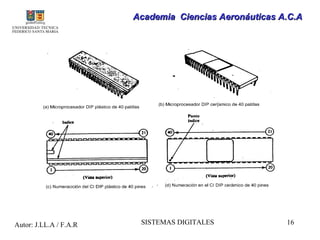



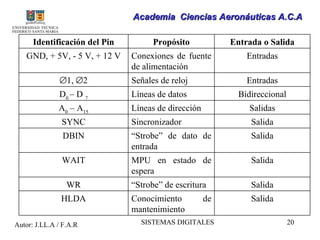
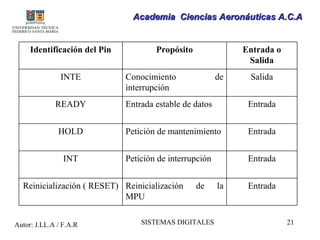
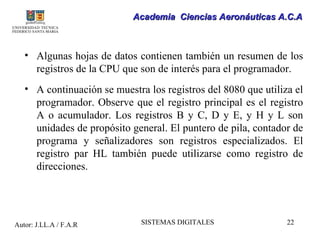


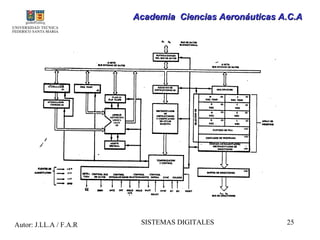














El documento proporciona una introducción a las características comunes de los microprocesadores. Describe las conexiones de alimentación, el tamaño en bits, las líneas de datos, direcciones y control, y los registros internos como el contador de programa, acumulador, registros de estado y registros de propósito general. También cubre el empaquetado del chip, la hoja de datos, la arquitectura básica y los componentes principales de un microprocesador.





























































