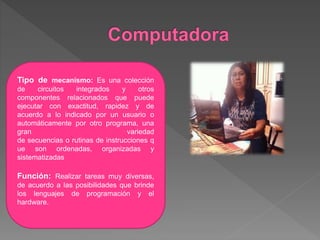
El documento presenta información sobre la robótica educativa. Explica que la robótica educativa es un ambiente de aprendizaje significativo donde los estudiantes aprenden construyendo máquinas simples y complejas utilizando software de control. También describe las diferencias entre robótica y robótica educativa, señalando que la robótica educativa es un medio de aprendizaje a través del diseño y construcción de creaciones propias.


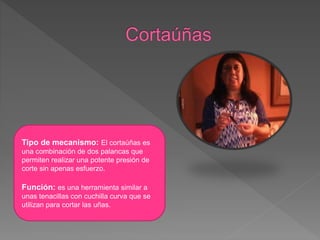



![Cortauñas.(2015).En Wikipedia. Recuperado el 21 de febrero del 2016 de
https://es.wikipedia.org/wiki/Corta%C3%BA%C3%B1as
Chispita (2008, 21 de octubre). Máquinas simples.[mensaje en blog]. Recuperado de
http://direciio.blogspot.com/2013/07/maquinas-simples-el-martillo-una.html
López , P (s.f).Definiciones conceptuales. Recuperado de https://
sites.google.com/site/sccotalopezpabloisai/1-definiciones-conceptuales
Mishell, V (2013,23 de julio). Máquinas compuestas. [mensaje en un blog]. Recuperado
de http://mauinasdirectioners.blogspot.com
Moreno, Muñoz, Serracin,Quintero,Patiño, Quiel (2012). LA ROBÓTICA EDUCATIVA,
UNA HERRAMIENTA PARA LA ENSEÑANZA-APRENDIZAJE DE LAS CIENCIAS Y LAS
TECNOLOGÍAS. Universidad de Salamanca , España. Recuperado 20 de febrero del
2016, desde www.redalyc.org/pdf/2010/201024390005.pdf](https://image.slidesharecdn.com/maquinassimplesycomplejas-160224044024/85/Maquinas-simples-y-complejas-20-320.jpg)















































