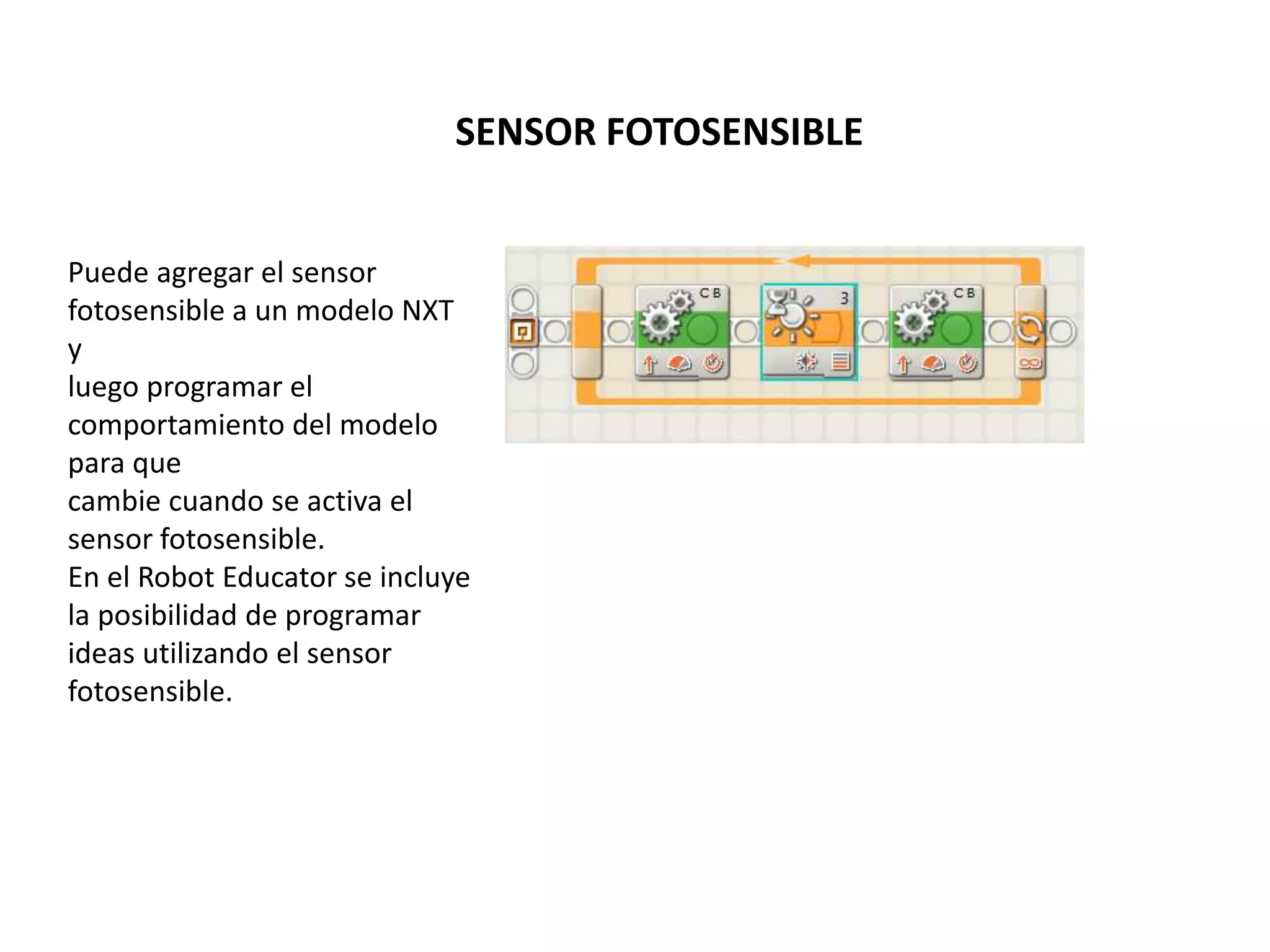
El documento describe un sensor fotosensible que permite a un robot distinguir entre luz y oscuridad y medir la intensidad de la luz, y explica cómo este sensor se puede agregar a un modelo NXT para programar su comportamiento en respuesta a cambios en la luz detectados por el sensor.