Descargar para leer sin conexión


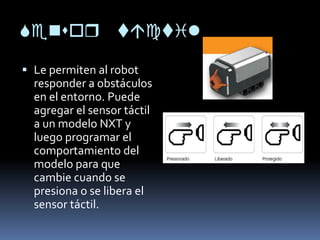




El documento describe los diferentes sensores que pueden agregarse al ladrillo inteligente LEGO NXT, incluyendo sensores táctiles, acústicos, fotosensibles y ultrasónicos. Estos sensores permiten al robot responder a obstáculos, niveles de sonido, variaciones de luz y medir distancias, respectivamente.


























































































