
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a pic-16F628 generalidades y prog 1y2.pdf
Similar a pic-16F628 generalidades y prog 1y2.pdf (20)
Último
Último (20)
pic-16F628 generalidades y prog 1y2.pdf
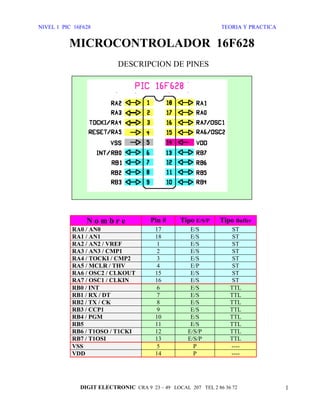
- 1. NIVEL 1 PIC 16F628 TEORIA Y PRACTICA MICROCONTROLADOR 16F628 DESCRIPCION DE PINES N o m b r e Pin # Tipo E/S/P Tipo Buffer RA0 / AN0 17 E/S ST RA1 / AN1 18 E/S ST RA2 / AN2 / VREF 1 E/S ST RA3 / AN3 / CMP1 2 E/S ST RA4 / TOCKI / CMP2 3 E/S ST RA5 / MCLR / THV 4 E/P ST RA6 / OSC2 / CLKOUT 15 E/S ST RA7 / OSC1 / CLKIN 16 E/S ST RB0 / INT 6 E/S TTL RB1 / RX / DT 7 E/S TTL RB2 / TX / CK 8 E/S TTL RB3 / CCP1 9 E/S TTL RB4 / PGM 10 E/S TTL RB5 11 E/S TTL RB6 / T1OSO / T1CKI 12 E/S/P TTL RB7 / T1OSI 13 E/S/P TTL VSS 5 P ---- VDD 14 P ---- DIGIT ELECTRONIC CRA 9 23 – 49 LOCAL 207 TEL 2 86 36 72 1
- 2. NIVEL 1 PIC 16F628 TEORIA Y PRACTICA BANCOS DE REGISTROS DEL PIC 16F628 DIGIT ELECTRONIC CRA 9 23 – 49 LOCAL 207 TEL 2 86 36 72 2
- 3. NIVEL 1 PIC 16F628 TEORIA Y PRACTICA CONJUNTO DE INSTRUCCIONES El conjunto de instrucciones de los microprocesadores PIC 16FXXX consiste en un pequeño repertorio de solo 35 instrucciones. En este curso se ha optado por clasificarlas, desde el punto de vista del programador, en cinco categorías bien definidas de acuerdo con la función y el tipo de operandos involucrados. Instrucciones de Byte que operan con Registros Estas instrucciones pueden ser de simple o doble operando de origen. El primer operando de origen será siempre el registro seleccionado en la instrucción, el segundo, en caso de existir, será el registro W. El destino, es decir donde se guardara el resultado, será el registro seleccionado o el W, según se seleccione con un bit de la instrucción. El formato genérico de estas instrucciones es el siguiente : 11 10 9 8 7 6 5 4 3 2 1 0 d f f f f f Los bits 0 a 4 (5 bits), denominados “f” permiten seleccionar uno de 35 registros de la memoria interna. El bit 5, denominado “d”, permite especificar el destino del resultado. Si d = 1 el resultado se guardara en el registro seleccionado. Si d = 0 el resultado se guardara en W. Los bits 6 a 11 identifican la instrucción especifica a realizar. Instrucciones de operaciones lógicas de doble operando : ANDWF f,d ;operación AND lógica, destino = W Ù f IORWF f,d ;operación OR lógica, destino = W Ú f XORWF f,d ;operación XOR lógica, destino = W Å f Los nombres mnemónicos de estas instrucciones provienen de : AND W con F, Inclusive OR W Con F y XOR W con F. Instrucciones de operaciones aritméticas y lógicas sencillas de simple operando : MOVF f,d ;movimiento de datos, destino = f COMF f,d ;complemento lógico, destino = NOT f INCF f,d ;incremento aritmético, destino = f + 1 DECF f,d ;decremento aritmético, destino = f - 1 Los mnemónicos de estas instrucciones provienen de : MOVe File, COMplement File, NCrement File y DECrement File. En las siete instrucciones anteriores el único bit afectado de la palabra de estado del procesador es el Z, que se pone en 1 si el resultado de la operación es 00000000, y se pone en 0 si el resultado tiene cualquier otro valor. DIGIT ELECTRONIC CRA 9 23 – 49 LOCAL 207 TEL 2 86 36 72 3
- 4. NIVEL 1 PIC 16F628 TEORIA Y PRACTICA Instrucciones de rotación de bits a través del CARRY : RLF f,d ;rotación a la izquierda, destino = f ROT RRF f,d ;rotación a la derecha, destino = f ROT En estas operaciones (Rotate Left File y Rotate Right File) los bits son desplazados de cada posición a la siguiente, en sentido derecho o izquierdo. El desplazamiento es cerrado, formando un anillo, con el bit C (CARRY) de la palabra de estado. En estas dos instrucciones, el único bit afectado de la palabra de estado del procesador es el bit C, que tomará el valor que tenia el bit 7 o el bit 0, según sea el sentido del desplazamiento. Estas instrucciones son muy útiles para la manipulación de bits, y además para realizar operaciones aritméticas, ya que en numeración binaria, desplazar un número a la izquierda es equivalente a multiplicarlo por 2, y hacia la derecha, a dividirlo por 2. Instrucción que realiza el intercambio de posiciones entre los cuatro bits menos significativos y los cuatro más significativos (nibble bajo y nibble alto). SWAPF f,d ;intercambia nibbles, destino = SWAP f Esta instrucción (SWAP File) no afecta ninguno de los bits de la palabra de estado del procesador. Esta instrucción es muy útil para el manipuleo de números BCD empaquetados, en los que en un solo byte se guardan dos dígitos BCD (uno en cada nibble). Instrucciones de operaciones de la suma y la resta aritméticas : ADDWF f,d ;suma aritmética, destino = f + W SUBWF f,d ;resta aritmética, destino = f - W Estas operaciones (ADD W a F y SUBstract W de F) afectan a los tres bits de estado C, DC y Z. El bit Z se pone en 1 si el resultado de la operación es 00000000, y se pone en 0 si el resultado tiene cualquier otro valor. La suma se realiza en aritmética binaria pura sin signo. Si hay un acarreo del bit 7, es decir que el resultado es mayor que 255, el bit C (carry) resulta 1, en caso contrario resulta 0. Si hay un acarreo del bit 3, es decir que la suma de las dos mitades (nibbles) menos significativas (bits 0 a 3) resulta mayor que 15, se pone en 1 el bit DC (digit carry), en caso contrario se pone en 0. Ejemplos : 1010 0010 1101 0000 + 0100 1111 C DC Z + 0110 1111 C DC Z 1111 0001 0 1 0 0011 1111 1 0 0 DIGIT ELECTRONIC CRA 9 23 – 49 LOCAL 207 TEL 2 86 36 72 4
- 5. NIVEL 1 PIC 16F628 TEORIA Y PRACTICA La resta se realiza sumando, en binario puro sin signo, el registro f más el complemento a dos de W (el complemento a 1, o complemento lógico, más 1) Ejemplos : f 0100 0100 0010 1000 W - 0010 1000 C DC Z - 0100 0100 C DC Z 0001 1100 1 0 0 1110 0100 0 1 0 equivalente a : f 0100 0100 0010 1000 cmp.2 W + 1101 1000 C DC Z + 1011 1100 C DC Z 0001 1100 1 0 0 1110 0100 0 1 0 Los bits de estado C y DC toman el valor normal correspondiente a la suma de f con el complemento a 2 de W. De esta manera el significado para la operación de resta resulta invertido, es decir que C (carry) es 1 si no hubo desborde en la resta, o dicho de otra manera, si el contenido de W es menor que el de f. El bit DC se comporta de manera similar, es decir que DC es 1 si no hubo desborde en la mitad menos significativa, lo que equivale a decir que el nibble bajo del contenido de W es menor que el del registrof. Instrucciones de simple operando y el destino es siempre el registro seleccionado : CLRF f ;borrado de contenido, f = 0 MOVWF f ;copia contenido W a f, f = W La instrucción CLRF (CLeaR File) afecta solo al bit Z que resulta siempre 0. La instrucción MOVWF (MOVe W a F) no afecta ningún bit de la palabra de estado. - Instrucciones de Byte que operan sobre W y Literales Estas instrucciones se refieren todas al registro W, es decir que uno de los operandos de origen y el operando de destino son siempre el registro W. En las instrucciones de este grupo que tienen un segundo operando de origen, este es siempre una constante de programa literalmente incluida en la instrucción, llamada constante literal o simplemente literal. El formato genérico de estas instrucciones es el siguiente : 11 10 9 8 7 6 5 4 3 2 1 0 k k k k k k k k Los bits 0 a 7 especifican la constante literal de 8 bits que se utilizara en la operación. DIGIT ELECTRONIC CRA 9 23 – 49 LOCAL 207 TEL 2 86 36 72 5
- 6. NIVEL 1 PIC 16F628 TEORIA Y PRACTICA Las tres instrucciones que siguen son las operaciones lógicas tradicionales, similares a las que ya vimos anteriormente, pero realizadas entre una constante de programa y el registro W : IORLW k ; operación OR lógica, W = W Ú k ANDLW k ; operación AND lógica, W = W Ù k XORLW k ; operación XOR lógica, W = W Å k En estas tres instrucciones (Inclusive OR Literal W, AND Literal W y XOR Literal W) el único bit afectado de la palabra de estado del procesador es el Z, que se pone en 1 si el resultado de la operación es 00000000, y se pone en 0 si el resultado tiene cualquier otro valor. Instrucción que cargar una constante de programa en el registro W : MOVLW k ;carga constante en W, W = K Esta (MOVe Literal W) instrucción no afecta ninguno de los bits de estado del procesador. La instrucción que sigue (CLeaR W) no correspondería incluirla en este grupo, y pertenece en realidad al primero, el de las instrucciones que operan sobre registros, ya que se trata de un caso especial de la instrucción CLRF, con destino W, y f = 0. La incluimos aquí porque como se le ha asignado un mnemónico particular referido específicamente al registro W, creemos que, desde el punto de vista del programador, es más útil verla dentro del grupo de instrucciones referidas a W. CLRW ;borra el contenido de W, W = 0 Al igual que en la instrucción CLRF, el único bit de estado afectado es el Z que resulta1 - Instrucciones de Bit El formato genérico de estas instrucciones es el siguiente : 11 10 9 8 7 6 5 4 3 2 1 0 b b b F f f f f Los bits 0 a 4 (5 bits), denominados “f”, permiten seleccionar uno de 35 registros de la memoria interna. Los bits 5 a 7, denominados “b”, permiten especificar el numero de bit (0 a 7) sobre el que se operara. Estas instrucciones operan solamente sobre el bit especificado, el resto de los bits del registro no son alterados. Estas instrucciones no tienen especificación de destino, ya que el mismo es siempre el registro seleccionado. BCF f,b ; borra el bit b de f ;bit f(b) = 0 BSF f,b ; coloca en uno el bit b de f ;bit f(b) = 1 Estas instrucciones (Bit Clear File y Bit Set File) no afectan ningún bit de la palabra de estado del procesador. DIGIT ELECTRONIC CRA 9 23 – 49 LOCAL 207 TEL 2 86 36 72 6
- 7. NIVEL 1 PIC 16F628 TEORIA Y PRACTICA - Instrucciones de Control GOTO k ;salto a la posición k (9 bits) del programa Esta es la típica instrucción de salto incondicional a cualquier posición de la memoria de programa . La constante literal k es la dirección de destino del salto, es decir la nueva dirección de memoria de programa a partir de la cual comenzarán a leerse las instrucciones después de ejecutar la instrucción GOTO. Esta instrucción simplemente carga la constante k en el registro PC (contador de programa). La única complicación de esta instrucción es que la constante k es de solo 9 bits, mientras que el registro PC es de 11 bits, ya que en el 16F628 debe permitir direccionar una memoria de programa de 2 K. Los dos bits faltantes, bit 9 y 10 del PC, son tomados respectivamente de los bits de selección de página PA0 y PA1 de la palabra de estado. Este comportamiento particular hace que la memoria de programa aparezca como dividida en paginas de 512 posiciones como se vera más adelante. El programador debe tener en cuenta que antes de ejecutar una instrucción GOTO es posible que haya que programar los bits PA0 y PA1. CALL k ;salto a la subrutina en la posición k (8 bits) Su comportamiento es muy similar al de la instrucción GOTO, salvo que además de saltar guarda en el stack la dirección de retorno de la subrutina (para la instrucción RETLW). Esto lo hace simplemente guardando en el stack una copia del PC incrementado, antes de que el mismo sea cargado con la nueva dirección k. La única diferencia con la instrucción GOTO respecto de la forma en la que se realiza el salto, es que en la instrucción CALL la constante k tiene solo 8 bits en vez de 9. En este caso también se utilizan PA0 y PA1 para cargar los bits 9 y 10 del PC, pero además el bit 8 del PC es cargado siempre con 0. Esto hace que los saltos a subrutina solo puedan realizarse a posiciones que estén en las primeras mitades de las paginas mencionadas. El programador debe tener en cuenta este comportamiento y asegurarse de ubicar las posiciones de inicio de las subrutinas en las primeras mitades de las paginas. La instrucción que aparece a continuación es la de retorno de subrutina: RETLW k ;retorno de subrutina con constante k, W = k Esta (RETurn con Literal in W) instrucción produce el retorno de subrutina con una constante literal k en el registro W. La operación que realiza consiste simplemente en sacar del stack un valor y cargarlo en el PC. DIGIT ELECTRONIC CRA 9 23 – 49 LOCAL 207 TEL 2 86 36 72 7
- 8. NIVEL 1 PIC 16F628 TEORIA Y PRACTICA Ese valor es el PC incrementado antes de realizar el salto, de la ultima instrucción CALL ejecutada, por lo tanto es la dirección de la instrucción siguiente a dicho CALL. Dado que el stack es de 11 bits, el valor cargado en el PC es una dirección completa, y por lo tanto se puede retornar a cualquier posición de la memoria de programa, sin importar como estén los bits de selección de pagina. Esta instrucción además carga siempre una constante literal en el registro W. Ya que esta es la única instrucción de retorno de subrutina de los PIC16FXXX, no hay en estos microprocesadores forma de retornar de una subrutina sin alterar el registro W. Por otro lado, y con una metodología especial de programación, un conjunto de sucesivas instrucciones RETLW puede ser usado como una tabla de valores constantes incluida en el programa (Ej. : tablas BCD/7 seg.). Instrucciones de “salto” (skip) condicional. Estas instrucciones son los únicos medios para implementar bifurcaciones condicionales en un programa. Son muy generales y muy poderosas ya que permiten al programa tomar decisiones en función de cualquier bit de cualquier posición de la memoria interna de datos, y eso incluye a los registros de periféricos, los puertos de entrada/salida e incluso la palabra de estado del procesador. Estas dos instrucciones reemplazan y superan a todo el conjunto de instrucciones de salto condicional que poseen los microprocesadores sencillos convencionales (salto por cero, por no cero, por carry, etc.). BTFSC f,b ;salta si bit = 0 BTFSS f,b ;salta si bit = 1 BTFSC (Bit Test File and Skip if Clear) saltea la próxima instrucción si el bit b del registro f es cero. BTFSS (Bit Test File and Skip if Set) saltea si el bit es 1. Estas instrucciones pueden usarse para realizar o no una acción según sea el estado de un bit, o, en combinación con GOTO, para realizar una bifurcación condicional. Ejemplo 1 : Ejemplo 2: DIGIT ELECTRONIC CRA 9 23 – 49 LOCAL 207 TEL 2 86 36 72 8
- 9. NIVEL 1 PIC 16F628 TEORIA Y PRACTICA Las instrucciones que siguen son casos especiales de las de incremento y decremento Estas instrucciones podrían categorizarse dentro del grupo de instrucciones orientadas a byte sobre registros (primer grupo), ya que efectivamente operan sobre los mismos, y el formato del código de la instrucción responde al de ese grupo, pero, a diferencia de las otras, pueden además alterar el flujo lineal del programa y por eso se les incluyó en este grupo. DECFSZ f,d ;decrementa y salta sí 0, destino= f - 1 INCFSZ f,d ;incrementa y salta sí 0, destino= f + 1 Estas dos instrucciones (DECrement File and Skip if Zero, e INCrement File and Skip if Zero) se comportan de manera similar a DECF e INCF, salvo que no afectan a ningún bit de la palabra de estado. Una vez realizado el incremento o decremento, si el resultado es 00000000, el microprocesador salta la próxima instrucción del programa. Estas instrucciones se utilizan generalmente en combinación con una instrucción de salto (GOTO), para el diseño de ciclos o lazos (loops) de instrucciones que deben repetirse una cantidad determinada de veces. - Instrucciones Especiales Instrucciones que controlan funciones específicas del microprocesador o que actúan sobre registros especiales no direccionados como memoria interna normal. La instrucción que sigue es la típica NO OPERATION. NOP ;no hace nada, consume tiempo Esta instrucción solo sirve para introducir una demora en el programa, equivalente al tiempo de ejecución de una instrucción. No afecta ningún bit de la palabra de estado. La instrucción que sigue borra el contador del watch dog timer. Este registro tampoco esta accesible como memoria, y esta es la única instrucción que lo modifica. CLRWDT ;borra el watch dog timer, WDT = 0 Esta instrucción, además, coloca en uno los bits PD (power down) y TO (time-out) de la palabra de estado. La siguiente es una instrucción especial de control del microcontrolador que lo pone en el modo power down. En este modo el microprocesador se detiene, el oscilador se apaga, los registros y puertos conservan su estado, y el consumo se reduce al mínimo. La única forma de salir de este estado es por medio de un reset o por time-out del watch dog timer. SLEEP ;coloca el µC en modo sleep, WDT = 0 Esta instrucción, además, borra el bit PD (power down) y setea el bit TO (time-out) de la palabra de estado. DIGIT ELECTRONIC CRA 9 23 – 49 LOCAL 207 TEL 2 86 36 72 9
- 10. NIVEL 1 PIC 16F628 TEORIA Y PRACTICA DIGIT ELECTRONIC CRA 9 23 – 49 LOCAL 207 TEL 2 86 36 72 10 INSTRUCCIONES DEL PIC 16FXXX
- 11. NIVEL 1 PIC 16F628 TEORIA Y PRACTICA ENCENDER UN LED A TRAVES DEL PUERTOB DEL PIC Puertos de Entrada y Salida La principal utilidad de las patitas que contiene un microcontrolador es soportar las líneas de E/S que comunican al computador interno con los periféricos exteriores. Según los controladores de periféricos de los microcontroladores, las líneas de E/S se destinan a proporcionar el soporte a las señales de entrada, salida y control. Reloj principal El oscilador genera una onda cuadrada de alta frecuencia, que configura los impulsos de reloj usados en la sincronización de las operaciones del sistema. Generalmente, el circuito de reloj está incorporado en el microcontrolador y sólo se necesitan unos pocos componentes exteriores para seleccionar y estabilizar la frecuencia de trabajo. Dichos componentes suelen consistir en un cristal de cuarzo junto a elementos pasivos o bien un resonador cerámico o una red R-C. Aumentar la frecuencia de reloj supone disminuir el tiempo en que se ejecutan las instrucciones pero lleva aparejado un incremento del consumo de energía Para las personas que no están de todo familiarizados con el tema es bueno recordar que es el led. LED según sus siglas en ingles (Light Emitting Diode) se traduce como diodo emisor de luz, que es un dispositivo semiconductor (vea el dibujo de abajo) de dos terminales nominados como cátodo (terminal negativa) y ánodo (terminal positiva). Si polarizamos nuestro led directamente este va a producir un haz de luz y con la polarización inversa va a permanecer apagado. A veces el funcionamiento de los diodos es comparado con los switches que se prenden y se apagan. Polarización directa Polarización inversa Una vez familiarizados con el hardware podemos proseguir con el software. Antes de ponerse a escribir el programa es aconsejable analizar primero los registros que se van a emplear en el dicho programa. DIGIT ELECTRONIC CRA 9 23 – 49 LOCAL 207 TEL 2 86 36 72 11 Ánodo + Cátodo Ánodo -- + Cátodo luz PRACTICA 1
- 12. NIVEL 1 PIC 16F628 TEORIA Y PRACTICA Registro STATUS Nosotros respetaremos la nomenclatura inglesa, pero escribiremos las variables que nos interesan. El motivo es muy simple: en ese PIC16F628 no se ha considerado el problema de los bancos de memoria, que se deben intercambiar a través del registro de estado. De este modo para nosotros PORTB representará al puerto B, TRISB será el mismo y W será el registro de trabajo. El programa, por lo demás, es bastante evidente. Necesitamos sólo introducir el sentido de los TRIS. Este registro está asociado a los distintos puertos y en él cada bit representa un pin del puerto al que se refiera. Un 0 en uno de sus bits representará que el pin es de salida, y un 1 que es de entrada. De este modo cada pin será independiente, dándonos mayor flexibilidad para la implementación física de los diseños. Es posible incluso, aunque no habitual, cambiar la dirección del pin durante la ejecución del programa. Esta opción puede llegar a darnos la posibilidad de manejar varios dispositivos con un solo puerto. DIGIT ELECTRONIC CRA 9 23 – 49 LOCAL 207 TEL 2 86 36 72 12
- 13. NIVEL 1 PIC 16F628 TEORIA Y PRACTICA SET DE INSTRUCCIONES UTILIZADAS EN LA PROGRAMACION 1. BCF f, b : Con esta instrucción se pone en 0 el bit b del registro f Ejemplo: Si se tiene en el puerto A ( PORTA ) = 1010 y se quiere colocar en cero el tercer bit, la instrucción es la siguiente: BCF PORTA , 3. 2. BSF f, b : Con esta instrucción se pone en 1 el bit b del registro f Ejemplo: Si se tiene en el puerto A ( PORTA ) = 1010 y se quiere colocar en UNO el tercer bit, la instrucción es la siguiente: BSF PORTA , 3. 3. GOTO K : realiza un salto incondicional a la dirección llamada k del programa Ejemplo: GOTO CONFIG quiere decir salte a la parte de configuración del programa. 4.CLRF F : Borra el contenido del registro, cuyo valor quedaría en 00000000 DESCRIPCIÓN DE NUESTRA PRACTICA ENCENDER UN LED Como inicio antes de empezar el programa en si, se deberá configurar el PIC, de forma que funciones a nuestras necesidades, esto quiere decir que debemos decirle como vamos a usar sus puertos, si van a ser de entrada o de salida, en nuestro caso solo requerimos de un solo puerto (puerto b7), y conectado a él, el respectivo led a encender con su resistencia para evitar un flujo de corriente muy grande, tal que pueda dañar nuestro pic. Después de la configuración inicial, y haber pasado por los respectivos bancos como se ilustrará en el programa, aseguraremos de que el puertob este en ceros y para ello borraremos el contenido con la instrucción de borra registro (CLRF), en este caso dirigido al registro PORTB, que es el puerto b que vamos a manipular. Luego sencillamente daremos la orden de encender el led, y esto se logra con enviar un uno o positivo por el puertob,7, y con ello se encenderá el led. Se explica en cuadro los registros TRISB,PORTB Y el bit RP0 del registro STATUS DIGIT ELECTRONIC CRA 9 23 – 49 LOCAL 207 TEL 2 86 36 72 13
- 14. NIVEL 1 PIC 16F628 TEORIA Y PRACTICA DIAGRAMA ESQUEMATICO DEL CIRCUITO . DIAGRAMA DE FLUJO DEL PROGRAMA DE ENCENDER EL LED DIGIT ELECTRONIC CRA 9 23 – 49 LOCAL 207 TEL 2 86 36 72 14 INICIO BANCO1 TRIS,7 => 0 BANCO0 Borrar puertoB Portb,7=> 1
- 15. NIVEL 1 PIC 16F628 TEORIA Y PRACTICA PROGRAMA PARA ENCENDER UN LED CON EL PIC 16F628 LIST P=16F628 INCLUDE <P16F628.INC> ORG 00 GOTO INI ORG 05 INI BSF STATUS,RP0 ;IREMOS AL BANCO1 BCF TRISB,7 ;EL PUERTO RB7 ESTARA COMO SALIDA BCF STATUS,RP0 ;DEVUELTA AL BANCO0 CLRF PORTB ;PARA BORRAR EL PUERTO Y QUEDE EN CEROS BSF PORTB,7 ;ENVIA UN 1(5V) A RB7 PARA ENCENDER LED GOTO $ ;EL CONTADOR DEL PROGRAMA SE QUEDARÁ AQUI END DIGIT ELECTRONIC CRA 9 23 – 49 LOCAL 207 TEL 2 86 36 72 15
- 16. NIVEL 1 PIC 16F628 TEORIA Y PRACTICA El ENCENDIDO DE UN LED EN FORMA INTERMITENTE Acordémonos que el objetivo esta vez no es solamente prender el led sino también apagarlo y volver a prender en una forma periódica o cíclica La pregunta es: ¿Cómo se logra la semejante operación? La respuesta a esa pregunta es SUBRUTINA. La pregunta de inmediata que surge es: ¿y que es una subrutina? Una subrutina es una parte del programa principal que se dedica a una tarea especifica. Ejemplos de subrutinas: - una subrutina que periódicamente me observa el estado lógico de un puerto - una subrutina que se encargue de realizar cálculos de determinadas variables en fin es la libertad del programador de asignar una determinada tarea a la subrutina. El uso de subrutinas, siendo sencillo y no requiriendo un apartado específico, es esencial, puesto que simplifica los programas, haciéndolos, además, más modulares. Llamaremos a una subrutina con la instrucción CALL, seguida de la etiqueta que la encabeza o su dirección en memoria. Para regresar a la siguiente instrucción tras el CALL bastará con situar, en la última línea de la subrutina, el comando RETURN; también será posible emplear RETLW k, el cuál se diferencia del anterior por situar en el registro W el valor k. En el caso de nuestra practica vamos a desarrollar una subrutina que se conoce con el nombre de retardo. El retardo o subrutina se encarga de que el programa principal en un determinado momento se queda parada por un tiempo que nosotros queremos que se detenga. Para ser mas concreto, al prender el led necesitamos que se quede prendido por un tiempo, después tenemos que apagarlo y mantenerlo apagado por otro rato y volver a hacer todo el procedimiento de nuevo. Ahora, como se arma una subrutina en el lenguaje de programación que nosotros estamos usando o sea MPLAB? La forma mas clásica de armar una subrutina es usando las instrucciones CALL y RETURN. Donde la instrucción CALL es usado por el programa principal para llamar la subrutina , donde esa a su vez realiza su tarea asignada ( en nuestro caso es un retardo en el tiempo) y retorna al programa principal de donde la llamaron usando la instrucción RETURN. Ya sabiendo como se arma una subrutina necesitamos saber como se hace el dicho retardo del tiempo que es la tarea de la subrutina, para eso observamos la siguiente subrutina: DIGIT ELECTRONIC CRA 9 23 – 49 LOCAL 207 TEL 2 86 36 72 16 PRACTICA 2
- 17. NIVEL 1 PIC 16F628 TEORIA Y PRACTICA RETARDO MOVLW .255 ;Se carga un registro CONTADOR MOVWF CONTADOR ;con un valor máximo decimal de 255 OTRAVEZ DECFSZ CONTADOR ;Se decrementa el dicho registro en uno GOTO OTRAVEZ ;Si CONTADOR no es cero se decrementa ;otra vez RETURN ;Al llegar a cero la subrutina RETARDO ;retorna al programa principal Usando un diagrama de flujos la rutina anterior se puede representar de la siguiente forma. Del ejemplo anterior lo que vemos es que la subrutina RETARDO se toma 255 veces haciendo la misma instrucción DECFSZ antes de retornar al programa principal. Sí nos acordamos que estamos trabajando con un cristal de 4 MHz, donde esa frecuencia es dividida internamente por el µC por cuatro, 4MHz/4 = 1MHz, eso quiere decir que el micro se demora 1 microsegundo para realizar una instrucción T = 1/f = 1/1MHz = 1µseg. Por lo tanto la subrutina RETARDO lo que hace es hacer un retardo aproximadamente de 255 microsegundos. Desafortunadamente en la vida real un retardo de 255 microsegundos es demasiado rápido para el ojo humano y no es percibido. Para solucionar este problema se recurre a una técnica llamada anidamiento, lo que hace es en si es manipular varias variables, y decrementarlas de forma que cuando termine una continúe con la otra, mejor que cuando una variable termine, decremente la otra en una unidad, y vuelva y se cargue de nuevo con un valor, lo que quiere decir que sus cantidades se multiplicarían. DIGIT ELECTRONIC CRA 9 23 – 49 LOCAL 207 TEL 2 86 36 72 17 CONTADOR ←255 CONTADOR - 1 ¿CONTADO R = 0 ? RETORNAR SI NO
- 18. NIVEL 1 PIC 16F628 TEORIA Y PRACTICA Veamos un ejemplo: Cuando reg3 se va decrementando, ,lo sigue haciendo hasta que su valor establecido llegue a cero, y cuando esto pasa, decrementa a la siguiente variable (reg2), una unidad, y de nuevo se carga reg3 con el valor establecido, lo que quire decir que este anidamiento consumira aproximadamente 90.000 ciclos de instrucion aproximadamente, o quizas mucho mas si es implementado en un pic, pues las instrucciones aplicadas para estos decrementos según el caso en un pic, suelen consumir 2 ciclos de instruccion, por lo que quiere decir que si tenemos en cuenta estos retornos (el volver a un punto del anidamiento), podrian consumir con estos valores no 90.000 sino hasta casi 270.000 ciclos de instruccion aproximadamente, aunque los anidamientos se pueden hacer de muchas formas según el programador, por lo que no existe un solo metodo, sino muchos y cada cual se acomoda a varias DIGIT ELECTRONIC CRA 9 23 – 49 LOCAL 207 TEL 2 86 36 72 18 retardo reg1=100 reg2=30 reg3=30 reg3 - 1=reg3 reg3= 0 reg2 - 1=reg2 reg2= 0 reg1 - 1=reg1 reg1= 0 retorne
- 19. NIVEL 1 PIC 16F628 TEORIA Y PRACTICA necesidades, pero en nuestra practica se implementará una de las mas sencillas formas, e incluso de las mas usadas. El anidamiento tiene como funcion mas comun la de crear retardos en el programa, esto es porque algunas actividades que hace el pic son muy rapidas, y para que los humanos las podamos percibir, debemos dilatar el tiempo para percibir lo que pasa. Precisamente , el percibir o retener tiempo,será la aplicación en nuestra practica, pues el objetivo es el de encender y apagar el led, y entre el encendido y apagado, debemos dejar que dure un tiempo encendido y un tiempo apagado. SET DE INSTRUCCIONES NUEVAS UTILIZADAS EN LA PROGRAMACION DECFSZ f,d: decrementa el registro f en uno y salta si el resultado es cero, el valor lo almacena en el registro w o en el registro f. Ejemplo: Se carga la variable numero con 5 y se desea decrementar la variable numero en 1 hasta que el resultado sea cero, si es así salte a la dirección fin , si no continué decrementando hasta que sea cero MOVLW D`05 MOVWF NUMERO SIGUE DECFSZ NUMERO,1 GOTO SIGUE GOTO FIN DESCRIPCION DEL CIRCUITO Como se había dicho anteriormente, el objetivo era el de encender un led de forma intermitente, para que se observara este efecto, de debe recurrir a los retardos por anidamiento. Iniciamos primero configurando el pic, en el caso para que el pin RB7 nos funcione como salida. Después para asegurar de que empiece apagado, borraremos el puerto con la instrucción CLRF PORTB, luego si damos la orden que se encienda el led, y para que podamos ver si se enciende y se apaga, daremos un retardo de encendido, que durara mas o menos un segundo, si se usa un cristal de 4MHz, luego de que termine el retardo, apagaremos el led, y de nuevo llamaremos el retardo, y se repetirá este ciclo indefinidamente, por lo que no tiene final, a menos que quitemos la alimentación. DIGIT ELECTRONIC CRA 9 23 – 49 LOCAL 207 TEL 2 86 36 72 19
- 20. NIVEL 1 PIC 16F628 TEORIA Y PRACTICA DIAGRAMA DE FLUJO PARA EL LED INTERMITENTE DIAGRAMA ESQUEMATICO DEL CIRCUITO DIGIT ELECTRONIC CRA 9 23 – 49 LOCAL 207 TEL 2 86 36 72 20 CONFIGURACIÓN DEL PUERTO ENCENDER LED LLAMAR RETARDO LLAMAR RETARDO APAGAR EL LED INICIO LIMPIAR PORTB