Descargado 885 veces




































Este documento describe diferentes métodos para diseñar filtros digitales, incluyendo implementaciones directas, en cascada y en paralelo. También explica técnicas de síntesis en el dominio del tiempo y de la frecuencia, como el diseño de impulso invariante y la transformada z bilineal. Finalmente, detalla el método general para diseñar filtros FIR partiendo de una respuesta en frecuencia deseada mediante truncamiento de la serie de Fourier.













































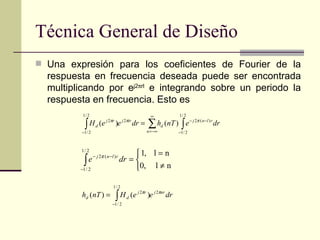
![[PDS-Bio] Unidad_5_2_Filtros_Digitales_IIR_23_I.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/pds-biounidad52filtrosdigitalesiir23i-240212211813-1511a93b-thumbnail.jpg?width=640&height=640&fit=bounds)









































