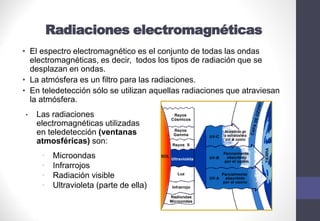
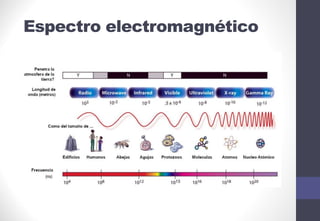
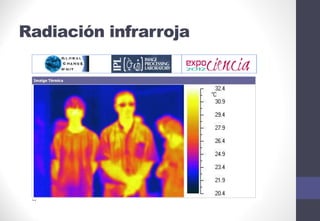
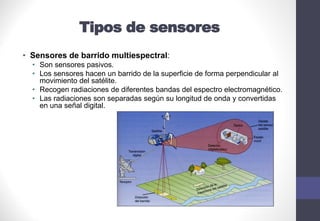
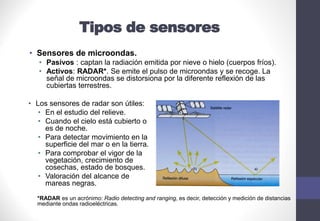
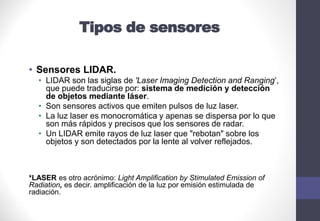
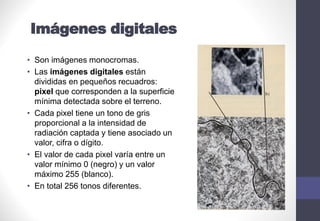
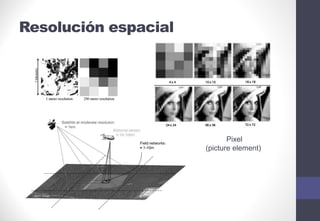
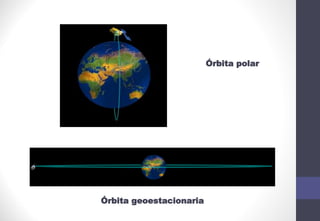
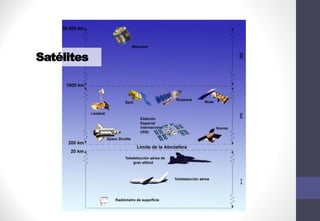
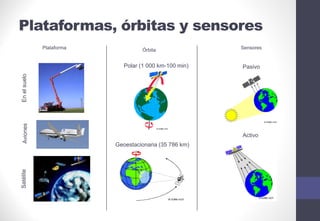
Este documento describe los conceptos fundamentales de la teledetección. Explica que la teledetección permite la observación a distancia de la superficie terrestre mediante sensores en satélites o aviones. Detalla los componentes de un sistema de teledetección, los tipos de sensores pasivos y activos, y las radiaciones electromagnéticas empleadas como el infrarrojo y las microondas. Además, explica conceptos como la resolución espacial, temporal y espectral de las imágenes digitales obtenidas.