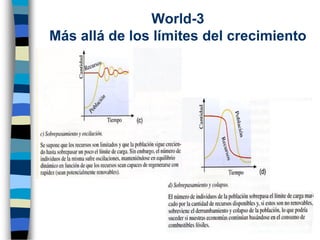
Este documento describe las nuevas tecnologías utilizadas en la investigación ambiental, incluyendo la simulación ambiental por ordenador, la teledetección y los satélites. Explica cómo los modelos como World-2 y World-3 simulan escenarios ambientales futuros y concluyen que los límites del planeta se alcanzarán en los próximos 100 años a menos que se adopten medidas de sostenibilidad. También describe los componentes y aplicaciones de los sistemas de teledetección, incluyendo el tipo de imágenes y las resoluciones de